РАСЧЕТЫ ПАДЕНИЯ И ПОТЕРИ НАПРЯЖЕНИЯ
П а д е н и е н а п р я ж е н и я: геометрическая разность векторов напряжения в начале и в конце рассматриваемого элемента схемы; потеря напряжения ΔU- алгебраическая разность напряжений в начале и в конце элемента.
Например, для линии Л1 (рис. 9.5, 9.6), если известно напряжение в конце линии Uв,
UА =  (9.22)
(9.22)
или, если известно напряжение в начале линии UА,
UВ =  (9.23
(9.23
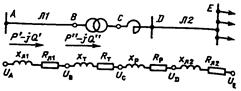
Рис. 9.5. Участок сети и его упрощенная схема замещения
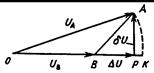
Рис. 9.5. Векторная диаграмма напряжений в начале и в конце линии:
ВР — продольная составляющая падения напряжения  U;
U;
РА - поперечная составляющая падения напряжения  U;
U;
ВА — падение напряжения;
ВК — потеря напряжения;
РК — ошибка, возникающая при расчете по потере напряжения
где
U” =  ;
;
 U’ =
U’ = 
- продольные составляющие падения напряжения на участке АВ, кВ;
U” =  ;
;
U’ = 
— поперечные составляющие падения напряжения на участке АВ, кВ; UA, P`, Q` — соответственно напряжение, кВ, активная, кВт, и реактивная, квар, мощности в начале линии; UВ, Р``, Q`` - то же конце линии.
При инженерных расчетах, не связанных с необходимостью определения векторов напряжений, обычно пользуются приближенными формулами, определяя только потерю напряжения, т. е. считая  U=0 и отрезок РК=0 (рис. 9.6.).
U=0 и отрезок РК=0 (рис. 9.6.).
Иногда пренебрегают также потерями мощности в линиях (считая
Р'=Р" и Q'=Q"), в этом случае в знаменателях формулU за среднее расчетное напряжение принимается номинальное напряжение сети, кВ,
UА = UВ + U ; UВ = UА - U ; (9.24)
U =  . (9.25)
. (9.25)
где P и Q – активные и реактивные мощности трёх фаз, кВт и квар;
r и x – активное и реактивное сопротивление участка АВ системы электроснабжения, Ом;
UНОМ – номинальное напряжение сети, в которую входит участок АВ (для трансформаторов – номинальное напряжение той обмотки трансформатора, к которой приведены r и х), кВ.