Логарифмические частотные характеристики типовых звеньев
Покажем технику построения ЛЧХ на примере двух динамических звеньев.
Безынерционное звено. Логарифмируя частотную передаточную функцию (4.15) , найдем
 (4.50)
(4.50)
|
 |
Так как k от частоты не зависит, ЛАХ безынерционного звена представляет прямую, параллельную оси абсцисс (рис. 4.17).
Апериодическое звено. Заменив в (4.22) оператор р на jw после логарифмирования получим
 , (4.51)
, (4.51)
 . (4.52)
. (4.52)
Рассмотрим вторую составляющую в (4.51)
 (4.53)
(4.53)
В диапазоне частот, когда  , можно считать
, можно считать  . При частотах, когда
. При частотах, когда  получим
получим  . При
. При  подкоренное выражение равно 2 и
подкоренное выражение равно 2 и  =3 дб. Логарифмическая амплитудная характеристика в этом случае может быть представлена в виде двух прямых (асимптот), сопрягаемых в точке
=3 дб. Логарифмическая амплитудная характеристика в этом случае может быть представлена в виде двух прямых (асимптот), сопрягаемых в точке  .
.
|
 называется сопрягающей частотой. Асимптота
называется сопрягающей частотой. Асимптота  совпадает с осью абсцисс, а асимптота
совпадает с осью абсцисс, а асимптота  наклонена к оси. Наклон второй асимптоты найдем по двум точкам:
наклонена к оси. Наклон второй асимптоты найдем по двум точкам:  и
и  . Разность ординат составит
. Разность ординат составит
 дб .
дб .
Это означает, что при двукратном изменении частоты прямая имеет наклон - 6 дб на октаву. При десятикратном изменении частоты разность ординат
 дб.
дб.
Наклон прямой при этом составит -20 дб/дек. Знак (-) показывает, что при возрастании частоты ординаты ЛАХ убывают (отрицательный наклон).
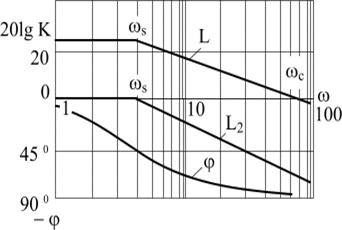 На рис. 4.18 показано сопряжение двух асимптот. Первая асимптота параллельна оси абсцисс и отстоит от нее на расстоянии
На рис. 4.18 показано сопряжение двух асимптот. Первая асимптота параллельна оси абсцисс и отстоит от нее на расстоянии  . Результирующая ЛАХ апериодического звена
. Результирующая ЛАХ апериодического звена  получается сложением двух составляющих. В окрестности
получается сложением двух составляющих. В окрестности  сопряжение может быть произведено плавной кривой, проходящей через точку, лежащую ниже пересечения асимптот на 3 дб. Частота, при которой ЛАХ пересекает ось абсцисс, называется частотой среза.
сопряжение может быть произведено плавной кривой, проходящей через точку, лежащую ниже пересечения асимптот на 3 дб. Частота, при которой ЛАХ пересекает ось абсцисс, называется частотой среза.
 Логарифмическая фазовая характеристика может быть построена по точкам (рис.4.18). Характерными точками являются
Логарифмическая фазовая характеристика может быть построена по точкам (рис.4.18). Характерными точками являются 
 ,
,  .
.
ГЛАВА 5
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ
5.1. Общие замечания
Различают два рода уравнений автоматических систем: уравнения статики (уравнения состояния равновесия) и уравнения динамики (уравнения переходных процессов).
Уравнения статики отражают связь между величинами, характеризующими автоматическую систему в ее установившихся состояниях. По уравнениям статики определяются значения регулируемых величин, положения регулирующих органов, расходы энергии или вещества через систему, параметры настройки и т. д.
Уравнения динамики описывают поведение автоматической системы в переходных процессах при появлении возмущающих сил, и после прекращения их действия.
Все автоматические системы состоят из элементов, которые можно разделить на два типа: элементы с сосредоточенными параметрами, элементы с распределенными параметрами.
Элементы с сосредоточенными параметрами. Физическое состояние таких элементов и их поведение в системе полностью определяется конечным числом переменных. Эти переменные могут иметь любую физическую природу (температура, давление, скорость, напряжение и т. д.). Переменные величины, задающие состояние элемента, носят название “обобщенных координат” этого элемента. Число обобщенных координат определяет число степеней свободы элемента с сосредоточенными параметрами. Примером элемента с сосредоточенными параметрами может служить физический маятник, состояние которого при заданной длине определяется одной координатой - отклонением центра тяжести маятника от положения равновесия. Динамика элементов с сосредоточенными параметрами описывается обыкновенными дифференциальными уравнениями.
Элементы с распределенными параметрами. Элементы этого типа имеют бесконечное число степеней свободы. Примером таких элементов может служить линия электропередачи, стенка трубы парового котла и т.д. Динамика элементов с распределенными параметрами описывается дифференциальными уравнениями в частных производных.
С точки зрения математического описания, простейшими динамическими системами являются системы с одной степенью свободы. Однако необходимо отметить, что число степеней свободы не всегда предопределяет степень технической сложности элемента или системы. Например, такой конструктивно сложный механизм, как двигатель внутреннего сгорания в задаче регулирования его числа оборотов обычно рассматривается как система с одной степенью свободы, то есть как простейшая динамическая система; в то же время шарик, свободно катящийся по горизонтальной плоскости, представляет собой систему с пятью степенями свободы.
Если система автоматического регулирования состоит из элементов с сосредоточенными параметрами, то при математическом описании она расчленяется на звенья с одной степенью свободы. Число таких звеньев будет равно числу степеней свободы расчленяемой системы или числу переменных участвующих в данной модели.