рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Реферат Курсовая Конспект
АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ - раздел Философия, Министерство Образования Российской Федерации...
Министерство образования Российской Федерации
Омский государственный технический университет
С. Ф. Абдулин
АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Учебное пособие
Омск 2002
С.Ф. Абдулин. – Омский государственный технический университет: Омск, изд-во ОмГТУ, 2002. – 150 с. Рассмотрены основные понятия и элементы автоматических и автоматизированных систем управления, даны основные понятия…ВВЕДЕНИЕ
За прошедшее десятилетия автоматизированные системы управления технологическими процессами (АСУТП) нефтепереработки и нефтехимии получили существенное развитие в количественном и качественном отношениях. Установилась масштабная деятельность зарубежных и отечественных фирм по созданию программного обеспечения задач контроля и управления технологическими процессами. При этом основным является развитие косвенных методов контроля неизмеряемых величин (переменных), адаптивного и многосвязного регулирования, оптимального управления и экспертных систем.
Осуществлен переход от устаревшего пневматического оборудования и традиционных щитовых систем к электронным микропроцессорным бесщитовым распределенным АСУТП сетевой архитектуры, в составе которых широко используются IBM-совместимые ПЭВМ и новейшие программные средства.
Появились организации (фирмы), выполняющие разработку и внедрение АСУТП ''под ключ'', включая изготовление и комплектацию оборудования. Усилившаяся конкурентная борьба способствовала повышению качества и снижению стоимости технических средств, программного обеспечения и выполняемых работ. Большое внимание уделяется повышению надежности систем.
АСУТП нефтепереработки и нефтехимии традиционно строится по двухуровневому принципу.
Информационно-управляющая подсистема нижнего уровня предназначена для оперативного контроля, автоматического регулирования и ручного дистанционного управления процессами, программно-логического управления технологическими агрегатами, контроля состояния, сигнализации, блокировка и защиты оборудования в аварийных ситуациях.
Информационно-управляющая подсистема является централизованной по характеру процессов контроля и управления, осуществляемых на каждом рабочем месте, и распределенной по аппаратной реализации своих функций. Задачи контроля и управления, решаемые в рамках этой подсистемы, достаточно универсальны и мало зависят от свойств объекта управления, а используемое программное обеспечение определяется выбором технических средств.
Функционирование информационно-управляющей подсистемы связано с переработкой текущей информации, поступающей с объекта. Решение задач, использующих информацию, накапливаемую за достаточно продолжительные интервалы времени, как правило, характерно для верхнего уровня АСУТП.
Подсистема верхнего уровня АСУТП является централизованной как по способам хранения и обработки информации, так и по аппаратной реализации, и ориентирована на решение задач расчетного характера. В составе функциональных задач верхнего уровня АСУТП выполняются технологические и технико–экономические расчеты, диагностика состояния технологического оборудования и учет времени его работы, прогнозирование показателей качества выпускаемой продукции, оптимальное управление установкой в целом и каждой из ее секций, архивирование значений технологических переменных с целью их апостериорного анализа.
Определяющими факторами, характеризующими качество подсистемы верхнего уровня, является, прежде всего, универсальность используемых алгоритмов, обеспечивающая возможность их применения и различных алгоритмов, обеспечивающая возможность их применения на различных объектах, а также гибкость системы, удобство ее настройки и сопровождения.
В составе технических средств распределенных АСУТП выделяются следующие аппаратно-функциональные элементы:
субкомплексы связи с объектом, обеспечивающие сбор информации, формирование и выдачу управляющих воздействий;
рабочие места операторов-технологов, реализующих систему отображения информации и человеко-машинный интерфейс связи с процессом;
вычислитель для решения функциональных задач верхнего уровня.
Большинство зарубежных и отечественных фирм считают основным подходом к организации субкомплексов связи с объектом на основе программируемых контроллеров, обеспечивая их использование, как в составе сложных систем, так и автономно.
Высокая надежность микропроцессорных программируемых контроллеров (МПК) обеспечивается путем аппаратного резервирования (дублирования или троирования) устройства в целом или отдельных информационных каналов. Живучесть выполняемых функций достигается высокой степенью их распределения по аппаратным средствам за счет применения функциональных плат.
Рабочее место оператора-технолога предназначено для обеспечения контроля и управления ходом технологического процесса и его агрегатами без привлечения дополнительных средств. Организовано рабочее место оператора-технолога на базе контроллеров, оснащенных цветными графическими терминалами, алфавитно-цифровыми и функциональными клавиатурами. Многие фирмы используют сенсорные экраны, позволяющие перемещать курсор по полю экрана прикосновением пальца.
В составе автоматизированного места оператора-технолога функционируют подсистемы отображения информации, автоматического контроля и сигнализации, связи оператора с технологическими процессом и системой.
Подсистема отображения реализует информационную модель управляемого объекта в виде последовательности кадров, вызываемых на экране цветных графических терминалов. Каждый кадр представляет собой мнемосхему участка технологического процесса с текущими значениями соответствующих переменных, набор графиков изменения этих переменных во времени или гистограмм распределения нарушений для границ различного уровня.
Идеология построения систем отображение информации в настоящее время предусматривает два основных принципа их реализации:
Представление информации по мере возникновения каких – либо нарушений или по требованию оператора;
Безусловное предоставление основной информации о доходе технологического процесса и ее последующей детализации при возникновении нарушений, либо по желанию оператора.
Примером осуществления первого принципа являются системы американских фирм Taylor МОД – 300, Honeywell ТДС – 3000. Конфигурирование этих систем основано на понятиях ''зона контроля'', ''группа элементов'' и ''динамический элемент''. Обеспечена возможность изменения задание регулятором при их вызове, осуществляемом подведением курсора к значению соответствующей переменой.
Второй принцип организации систем отображение информации является более последовательным в идеологическом плане. Он базируется на четком разделении смыслового содержания отображаемой информации и способов ее отображения.
Состав информации на выводимых кадрах выбирается из условия максимальной информативности их сопоставительного анализа в каждой конкретной ситуации, а формы ее отображения обеспечивают наилучшую психологическую восприимчивость для оператора в зависимости от характера сопоставления. Любые действия оператора начинаются с вызова требуемого ему информационного кадра. Запросы на выводы кадров могут быть организованы различными способами:
Прямым вызовом по имени (имеется подсказка – меню) или нажатием соответствующей этому кадру клавиши на алфавитно-цифровой или функциональной клавиатурах;
Подведением курсора в определенное место мнемосхемы (обзорного кадра) или движением ''окна'' по мнемосхеме (детализация участков мнемосхемы);
Последовательным перелистыванием в прямом и обратном направлениях.
Регуляторы отображаются в привычном для операторов виде стилизованных шкал, а величина задания изменяется с помощью клавиш увеличения или уменьшения.
Совпадение текущих значений регулируемой переменной и задания отображается на шкале с учетом точности измерений. Управление дискретными элементами (насосами, компрессорами, задвижками, отсечными клапанами), требующее незамедлительных действий оператора в определенных ситуациях, организовано на базе функциональных клавиатур, что значительно снижает время его реакции при возникновении нарушений.
Средствами конфигурирования системы могут быть специализированные языки описания системы, заполнения таблиц, ответы на вопросы меню.
Выполняется конфигурирование либо с рабочей консоли оператора, либо с помощью специализированной или персональной ЭВМ, подключенной системе.
Надежность и живучесть функций рабочего места оператора-технолога обеспечивается введением резервной станции с организацией для нее доступа к информации по всем имеющимся зонам контроля.
В системах управления технологическими процессами используются сети, являющиеся разновидностями стандартного протокола МАР–протокола автоматизации производства, разработанного компанией General Motors (США).
Основными направлениями совершенствования функций контроля и управления в АСУТП являются разработка алгоритмов реального времени для косвенного контроля неизмеряемых переменных, автоматизация настройки регуляторов, адаптивного одноконтурного и многосвязного регулирования, оптимального управления и экспертных систем.
В основе всех указанных разработок лежит математическая модель технологического процесса, получаемая методами статистики (объектно- независимые пакеты), формальной кинетики (объектно-зависимые пакеты) и теория нечетких множеств (для экспертных систем).
Автор выражает сердечную благодарность главному инженеру ОНПЗ Абрашенкову П.А., начальнику службы ИТАТ ОНПЗ Говядинову А.В., начальнику группы электриков и КИПиА Логохину А.Г., главным специалистам ИТАТ Козлову А.В., Федорову В.Н. за оказанную любезность в предоставлении новых каталогов по средствам автоматизации и материалов по реальным современным средствам и системам АСУТП.
ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЗАЦИИ
Основные понятия об объектах и системах
Автоматического управления
Замена ручного труда человека в операциях управления на управление с помощью технических средств называется автоматизацией. Технические средства, с… Аппарат, оборудование в которых протекает управляемый технологический процесс,… Технологические процессы находятся под воздействием внутренних и внешних возмущений, нарушающих равновесный режим.…Общие сведения о Государственной системе
Промышленных приборов и средств автоматизации (ГСП)
В науке и технике известно более 2000 различных физических величин. Для измерения их требуются различные по принципу действия и конструкциям автоматические средства измерения, регулирования и управления. Для уменьшения количества средств измерения и автоматизации путем унификации их принципов измерения и конструкций создана Государственная система промышленных приборов и средств автоматизации (ГСП).
Все средства ГСП по функциональному назначению подразделены на четыре группы.
Средства ГСП по роду используемой энергии подразделяются на три ветви: электрическую, пневматическую и гидравлическую. Выпускаются также комбинированные средства: электропневматические (пневмоэлектрические), электрогидравлические.
Автоматический контроль и измерение
Технологических параметров
Основы метрологии и техники измерений
Научной основой САК являются метрология и физические принципы измерения параметров технологических процессов. Технической базой САК являются средства измерений (СИ) и преобразований… Метрология-это наука об измерениях, методах и средствах обеспечения их единства и способах достижениях требуемой…Классификация средств измерений
СИ подразделяются на: меры, калибры, измерительные преобразователи (Ипр), измерительные приборы (ИП), измерительные установки, измерительные системы.
Мера-СИ для воспроизведения физической величины заданного размера (например, линейка, нормальный элемент, конденсатор).
Измерительный прибор – СИ для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателя.
Измерительный преобразователь – СИ для выработки сигнала измерительной информации в форме, удобной для передачи сигнала, обработки, хранения, но не воспринимаемой наблюдателем.
Измерительная установка – совокупность функционального объединения СИ (мер, ИП, Ипр) и вспомогательных устройств, предназначенных для выработки сигнала измерительной информации в форме, удобной для непосредственного восприятия наблюдателем, и расположенную в одном месте.
Измерительная система – совокупность СИ и вспомогательных устройств, соединенных каналами связи, предназначенная для выработки сигнала в форме, удобной для автоматической обработки, передачи и использования в автоматических системах управления.
Основным признаком классификации ИП является измеряемая физическая величина, по которому приборы классифицируется на ИП для измерения: температуры; давления; уровня жидкости и сыпучих материалов; количества и расхода жидкостей, газов, сыпучих материалов; плотности и вязкости вещества, анализа состава жидкостей и газов; влажности; геометрических размеров и других технологических параметров.
По другим признакам приборы классифицируются следующим образом: по применению – технические (производственные), лабораторные, контрольные, образцовые и эталонные; по виду показаний – показывающие, записывающие, интегрирующие, печатающие и регистрирующие; по способу применения – стационарные и переносные; по способу формирования сигналов: аналоговые, в которых сигнал измерительной информации является непрерывной функцией измеряемой величины и цифровые, в которых вырабатываются дискретные сигналы измерительной информации в цифровой форме; по точности измерения ИП различаются классом точности (например, классы точности 0,5; 1,0; 1,5 и т.д.); по защищенности Ип бывают обычного исполнения, пылеводонепроницаемые, тропического исполнения и взрывозащищенные.
Основные метрологические характеристики ИП
Погрешность характеризует отклонение измеряемой величины от ее истинного (действительного) значения. Истинное значение измеряемой величины… Нормирующее значение ХN - верхний придел хв измеряемой величины или диапазон… Класс точности прибора устанавливается в зависимости от значений пределов допустимых основной и дополнительной…Типовые измерительные схемы и приборы технического контроля
2.2.1 общие сведения о датчиках физических величин
По классификации изделий Государственной системы приборов (ГСП) датчики делятся на группы по входным физико-химическим воздействиям и физическим информационным сигналам на входе [46].
Рассмотрим здесь классификацию датчиков по признакам, достаточным для специалистов технологов химической, нефтеперерабатывающей и нефтехимической отраслей.
1. По виду измеряемой физической величины различают датчики давления, температуры, влажности, расхода, уровня, состава и свойств жидкостей и газов и т.д.
2. По характеру воздействия измеряемой среды различают датчики для агрессивных и неагрессивных сред, контактные и бесконтактные, для обычных условий, умеренно холодных, тропических, электробезопасные и взрывозащищенные и пр.
3. По виду информативного параметра выходного сигнала бывают датчики амплитуды постоянного и переменного тока, амплитуды напряжения постоянного и переменного тока, частоты (фазы) синусоидальных и импульсных напряжений, с цифровым кодом, давления, перемещения и пр.;
4. По используемому физическому эффекту различают датчики тензорезисторные, терморезисторные, термоэлектрические, пьезоэлектрические и др.
5. По принципу действия датчики бывают емкостные, электромагнитные, потенциометрические, ультразвуковые, электрохимические, оптические и пр.
6. По конструкции чувствительного элемента датчики бывают мембранные, сильфонные, поплавковые и др.
7. По технологии производства – традиционной, микроэлектронной, оптоэлектронной, микромеханической технологий.
Наиболее распространенные датчики или первичные измерительные преобразователи (ПИП) работают по следующей схеме преобразования: неэлектрическая величина ® перемещение ® электрическая величина.
Резисторные датчики
Потенциометрические датчики. В них измеряемая физическая величина обычно с помощью механической передачи преобразуется в перемещение движка… Датчики представляет собой каркас, на котором намотан в один слой провод с…Емкостные датчики
В простейшем случае они состоят из двух металлических пластин (электродов), разделенных малым воздушным зазором. Любое изменение зазора либо… Перемещение подвижного электрода и соответствующее изменение емкости может… Изменение емкости конденсатора можно достичь изменение входной величины: расстояние d между двумя (и более)…Электромагнитные датчики
Датчики, преобразующие входную величину - перемещение в изменении индуктивности, называются индуктивными, а в изменение взаимоиндуктивности -… Индуктивный датчик (рис.2.3) основан на изменении индуктивности обмотки 1…Методы измерения важнейших технологических параметров.
Температура – один из распространенных параметров, который приходится контролировать в различных средах: газовой, паровой, жидкостной и твердой. В современной практике используется две температурные шкалы: 1. Международная практическая температурная шкала МПТШ с температурным интервалом 0-1000 . Температура по ней…Термометры расширения
Жидкостные стеклянные термометры применяются для измерения температуры жидких и газообразных сред в диапазоне от –35 до 100…1500С (иногда до 5000С).… Биметаллические и дилатометрические термометры. Принцип действия их основан на…Термометры сопротивления
Rt = Rо· (1 + α · t ), (2.7) где Rо- сопротивление термометра при t = 0 0С; α – температурный… Серийно выпускаются платиновые термометры типа ТСП с несколькими стандартными градуировками 1П, 5П, 10П, 50П, 100П,…Термоэлектрические термометры
Цепь из двух разнородных проводников (рис. 2.7.) называется термопарой. Спай с температурой t называется горячим. Спай с температурой t0 называется… Рис.2.7. Схема термоэлектрического термометраАвтоматические системы регулирования
Технологических параметров
Цель автоматического регулирования, являющегося частным случаем автоматического управления, состоит в обеспечении заданного алгоритма… Задача автоматического регулирования здесь сводится к поддерживанию равенства… где x1(t) – требующееся изменение регулируемой величины во времени (заданное изменение); x2(t) – действительное…Классификация автоматических систем регулирования
Классификация АСР производится по довольно большому количеству признаков, рассмотрим ее в классическом варианте.
1.По принципу регулирования различаются два типа АСР:
АСР по отклонению характирезуется тем, что регулирующее воздействие на объект регулирования формируется в зависимости от отклонения текущего значения регулируемой величины от заданного. На этом принципе были разработаны первые промышленные регуляторы уровня воды И.И. Ползуновым (1765 г.) и скорости Дж. Уаттом (1784 г.).
АСР по возмущению( принцип компенсации) характеризуется тем, что измеряя возмущающее воздействие на объект регулирования и формируя соответствующее регулирующее воздействие на объект, можно обеспечить независимость работы системы от этих возмущающих воздействий. Такие АСР, инвариантные (независимые) от возмущающих воздействий (рис. 3.1), отличаются быстротой реакции и хорошими характеристиками по устойчивости и качеству регулирования. Однако сложность измерение всех возмущающих воздействий создает трудности в реализации подобных систем и поэтому они не получали широкого распространения.
Как видно из рис. 3.2, здесь измеряется не возмущение, а отклонение регулируемой величины от заданного закона изменения – ошибка Δ(t). Если
Δ (t) ≠ 0, автоматический регулятор создает регулирующее воздействие у(t)
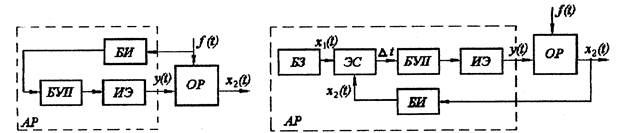
| Рис. 3.1 Функциональная схема АСР по возмущению: ОР - объект регулирования; БИ – блок измерения; БУП – блок управления; ИЭ – исполнительный элемент; f(t)- возмущающее воздействие; АР – автоматический регулятор. | Рис. 3.2. Функциональная схема АСР пол отклонению: ОР – объект регулирования; БИ – блок измерения; БЗ – блок задания; ЭС – элемент сравнения; БУП – блок управления; ИЭ – исполнительный элемент; АР – автоматический регулятор. |
на объект регулирования, ликвидирующее ошибку до допустимой величины. Системы, работающие по ошибке (отклонению), образуют замкнутый контур и поэтому называются замкнутыми системами. Благодаря наличию связи между выходом объекта и входом автоматического регулятора образуется, так называемая, обратная связь. А так как на элементе сравнения при определении ошибки происходит вычитание x2(t) из x1(t), то обратная связь называется отрицательной. Поэтому АСР, работающие по ошибке, представляют собой системы с отрицательной обратной связью, которая служит для измерения результата действия системы. Обе рассмотренные системы относятся к одноконтурным АСР.
Принцип обратной связи широко используется в технике, не только в АСР. То есть обратные связи присутствуют в измерительных и вычислительных устройствах, усилителях и т. д. Взаимодействие человека с различными техническими устройствами часто также происходит при наличии обратных связей, т.к. человек постоянно контролирует результат своего вмешательства в работу того или иного устройства, агрегата и т.п. Таким образом, принцип обратной связи является одним из основных принципов управления и регулирования, а АСР, работающие по ошибке, наиболее распространены в различных отраслях промышленности.
Однако АСР по отклонению имеют и определенный недостаток: чтобы ликвидировать отклонение регулируемой величины от заданного значения, необходимо наличие этого отклонения, тогда как в АСР по возмущению ликвидируется сама причина возникновения ошибки. Объединением обоих принципов регулирования в одной АСР создается комбинированная АСР, лишенная недостатков каждой из систем в отдельности. Наличие в ней разомкнутого контура обеспечивает независимость регулируемой величины от одного из наиболее значительного по своему влиянию возмущения. А наличие замкнутого контура (обратной связи) ликвидируют влияние всех других возмущающих воздействий и неточностей компенсации.
2. По характеру изменения заданного значения регулируемой величины xзд(t) = x1(t) АСР подразделяются на:
системы стабилизации, предназначенные для поддержания заданного значения регулируемой величины объекта, xзд(t) = const;
системы программного регулирования, в которых регулируемая величина объекта изменяется по заданной программе, xзд(t) = f (t);
следящие системы регулирования, в которых характер изменения выходной величины зависит от характера изменения какой-либо входной величины объекта, xзд(t) ≠ f(t).
3. АСР в зависимости от свойств системы в установившемся режиме разделяют на статические и астатические.
Статические системы характеризуются наличием остаточного отклонения регулируемой величины в установившемся состоянии равновесия, а величина отклонения при этом зависит от величины возмущающего воздействия на объект.
Астатические системы характеризуются отсутствием остаточных отклонений в установившемся состоянии равновесия.
Для статистической АСР (рис. 3.3,а) характерно то, что в установившемся состоянии количество расходуемой жидкости Qнагр (нагрузка) равно количеству поступающей через регулирующий орган жидкости Qпит. Следовательно при изменении Qнагр будет устанавливаться новое состояние равновесия со значением уровня h, которому будут соответствовать новое положение регулируемого органа (РО) и новое количество поступающей жидкости. Таким образом, новое значение регулируемой величины hуст в установившемся состоянии будет несколько отличаться от hзад, т.к. новому положению РО соответствует новое положение чувствительного элемента (поплавка), соответствующее h.
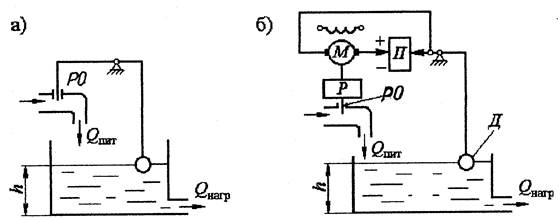
Рис 3.3. АСР уровня жидкости статическая (а) и астатическая (б).
Для астатической АСР уровня (рис 3.3,б) характерно то, что при отклонении уровня от состояния равновесия появляется разбаланс потенциометра П, сигнал с которого подается на двигатель М. Последний через редуктор Р перемещает РО (заслонку), изменяя количество подливаемой жидкости Qпит. Уровень жидкости восстанавливается до исходного (заданного) значения, при котором восстанавливается баланс потенциометра и двигатель М останавливается.
4. По способу передачи сигналов между элементами автоматической системы АСР подразделяются на системы непрерывного и дискретного действия.
Непрерывные АСР характеризуются тем, что входная и выходная величины ее являются непрерывными функциями времени.
Дискретные (прерывистые) АСР характеризуются тем, что содержат хотя бы один элемент, в котором при непрерывном изменении входного сигнала выходной сигнал изменяется дискретно.
5. Автоматические системы бывают линейными и нелинейными.
Линейные системы описываются линейными уравнениями.
Нелинейные системы описываются нелинейными уравнениями и более сложны при анализе их.
Большинство систем при анализе их оказываются нелинейными. Однако в ряде случаев, учитывая малые отклонения величин, с которыми работают системы в реальных технологических режимах, практически их можно считать линейными и соответственно пользоваться методом анализа линейных АСР.
Объекты регулирования и их свойства
Технологический процесс, как правило, характеризуется несколькими регулируемыми величинами. Например, в тепловом объекте регулирования выходными… Установившийся режим в объекте, характеризуемый неизменным значением… Объекты регулирования характеризуются следующими свойствами: самовыравниванием, емкостью и запаздыванием.Автоматические регуляторы и законы регулирования
3.3.1. Классификация линейных регуляторов По функциональному назначению и конструктивномуисполнению регуляторы можно квалифицировать следующим образом:Усилительно-преобразовательные устройства
В зависимости от необходимой мощности для управления приводами ИМ и используемой в них видов энергии различают следующие усилители: Электронные (ЭУ), когда требуется выходная мощность не более 100 ÷ 150… Магнитные усилители, отличающиеся простотой и надежностью, но имеющие определенные недостатки (сложность получения…Реле
Реле - это устройство автоматики, преобразующее заданное значение контролируемой величины в скачкообразное изменение состояния управляемой цепи (например, ее замыкание или размыкание).
Реле широко используется в управлении поточно-транспортной системой (ПТС) различных технологических процессов, а так же для программного управления отдельным оборудованием (стиральная машина, аппараты химчистки, холодильники и т.д.).
Реле бывают электрическими, гидравлическими, пневматическими и комбинированными. Среди электрических реле большое распространение получили электромеханические реле, которые в свою очередь подразделяются на: электромагнитные (постоянного и переменного тока), магнитоэлектрические, электродинамические, индуктивные и электротермические. В свою очередь реле постоянного тока подразделяют на нейтральные и поляризованные. Нейтральное реле одинаково реагирует на постоянный ток обоих направлений, протекающий по обмотке. Действие поляризованного реле зависит от направления тока.
Реле времени. В практике управления технологическим процессом и отдельным оборудованием часто возникает необходимость включения цепей управления по истечению определенного времени после достижения регулируемым параметром заданного значения. Для этой цели применяются реле времени (РВ).
Замедление срабатывания (отпускания) реле, обеспечивающее задержку появления (исчезновения) выходного сигнала после подачи (снятия) входного сигнала, осуществляется электрическими (схемными), механическими или конструктивными методами. РВ бывают: а) тепловые; б) моторные; в) электронные (полупроводниковые); г) электромагнитные с электронным, пневматическим и др. механическими замедлителями. Выдержка времени бывает от долей секунд до нескольких минут.
Реле имеют разные наборы контактов: замыкающие и размыкающие с выдержкой времени при замыкании или размыкании входных цепей реле, а так же мгновенно срабатывающие контакты.
Серийно выпускаются : электронные реле времени серии ВЛ; моторные реле времени серии МРВ; программные реле серии ВС-10; а так же командные электропневматические приборы типа КЭП-12 для управления до двенадцатью электрическими и пневматическими цепями.
Герконы -это особый тип реле, представляющий наполненную инертным газом герметизированную стеклянную ампулу с контактными пружинами, помещенную внутри цилиндрической катушки. При пропускании тока по катушке контактные пружины притягиваются друг к другу и замыкают управляющую цепь. Эти реле отличаются высокой надежностью и малыми размерами, частота срабатываний может достигать сотен герц. Диаметр ампулы реле равен 5 мм, а ее длина 20мм. Срок службы их достигает 108-1012 циклов, тогда как у выше рассмотренных реле он составляет 106 циклов.
Исполнительные механизмы и регулирующие органы.
Исполнительное устройство АСР состоит из двух функциональных блоков: исполнительного механизма (ИМ) и регулирующего органа (РО). Исполнительный… Основными требованиями к ИМ являются: повышенная надежность, быстродействие,… Исполнительные механизмы бывают: электрические, пневматические, гидравлические, а так же комбинированные.Управление приводами
Основными элементами релейно-контактных систем автоматики являются реле, контакторы, магнитные пускатели, кнопки управления, командоконтроллеры,… Контактор - это двухпозиционный аппарат с самовозвратом, предназначенный для… Магнитные пускатели-это специальные пусковые устройства, состоящие из одного или двух контакторов, тепловых реле и…Основные характеристики элементов
И линейных автоматических систем регулирования
Непрерывного действия
Исследование элементов и автоматических систем регулирования (управления) связано с изучением процессов, в них протекающих. Характер этих процессов… АСР и АСУ состоят из связанных между собой функциональных элементов. Поэтому… Элемент системы характеризуется сигналами на входе и выходе. Различают статические и динамические характеристики…Дифференциальные уравнения для элементов и систем
Математические описания элементов и систем осуществляются на основе физических, электрических, механических и др. законов, на которых основана… Учитывая сложность математического описания динамики процессов в элементах,… Анализ линейных систем существенно проще, чем анализ нелинейных систем. Поэтому часто применяют линеаризацию…При определенных затруднениях непосредственного вычисления интеграла (3.45), прибегают к графическому вычислению указанных интегралов. Для этого вещественную частотную характеристику разбивают на типовые трапециидальные или треугольные характеристики, для которых переходные
n
процессы табулированы (hį (t)), а далее находят h(t)= ∑hį (t).
I=1
3.9. Многоконтурные АСР
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных типовых законов можно обеспечить лишь при благоприятных динамических характеристиках объекта. Большинство же промышленных объектов химической технологии характеризуется значительным чистым запаздыванием и большими постоянными времени. В этих случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами. Для повышения качества регулирования необходим переход от одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные регулирующие устройства – динамические компенсаторы или дополнительные регуляторы.
По характеру корректирующего импульса различают следующие многоконтурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные – двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
Комбинированные АСР
Комбинированные системы регулирования применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 3.28. приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования – стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара – выполняется регулятором 1.
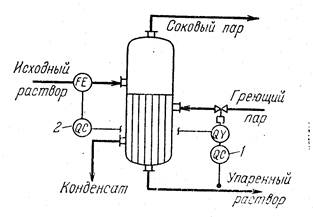
Рис.3.28.Пример комбинированной системы регулирования
концентрации упаренного раствора:
1-регулятор состава; 2 – динамический компенсатор.
Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.

Рис.3.29.Пример комбинированной системы регулирования
состава дистиллятара:
1-подогреватель исходной смеси; 2-ректификационная колонна; 3-дифлегматор; 4-флегмовая емкость; 5-регулятор; 6-динамический компенсатор.
На рис.3.29 приведен пример комбинированной АСР состава дистиллятара в ректификационной колонне. Стабилизация состава дистиллята обеспечивается регулятором 5 путем изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе-расхода разделяемой смеси. Корректирующий импульс на задание регулятору поступает через динамический компенсатор 6.
Рассмотренные примеры иллюстрируют два способа построения комбинированных АСР. Как видно из структурных схем (рис.3.30,а и 3.30,б),обе системы регулирования обладают общими особенностями: наличие двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования – замкнутого (через регулятор 1 ) и разомкнутого (через компенсатор 2 ). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижения абсолютной инвариантности в реальных системах регулирования практически невозможно.

А) б)
Рис 3.30. Структурные схемы комбинированных АСР при подключении
выхода компенсатора на вход объекта (а) и на вход регулятора (б):
1 – регулятор; 2 – компенсатор.
Обычно ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условия инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условия инвариантности разомкнутой и комбинированной АСР.
Рассмотрим условия инвариантности разомкнутой системы (Рис.3.31): у(t)=0.
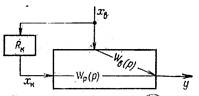
Рис. 3.31 Структурная схема разомкнутой АСР.
Переходя к изображению по Лапласу Хв(р) и Y(p) сигналов хв(t) и у(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения Wв(p) и регулирования Wр(p) и компенсатора Rк(р):
Y(p)= Хв(р)[ Wв(p)+ Rк(р) Wр(p)]=0 (3.46)
При наличие возмущения [Хв(р) ≠ 0] условия инвариантности (3.46) выполняется, если
Wв(p)+ Rк(р) Wр(p) ≡0 (3.47)
откуда Rк(р)= − Wв(p)/ Wр(p). (З.48)
Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Условия физической реализуемост инвариантных АСР.Одной из основных проблем возникающих при построение инвариантных систем регулирования, является их физическая реализуемость т.е. реализуемость компенсатора, отвечающего условию (3.48).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик – физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения.
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при определенном соотношение порядков дифференциальных уравнений, описывающих каналы возмущения и регулирования.
Техническая реализация инвариантных АСР.При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитываются из условия близости частотных характеристик идеального [Rк(jω)] и реального [Řк(jω)] компенсаторов в этом диапазоне частот.
3.9.2. Каскадные АСР
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис 3.32) включают два регулятора – основной (внешний) регулятор, служащий для стабилизации основного выхода объекта у, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты у1.заданием для вспомогательного регулятора служит выходной сигнал основного регулятора.
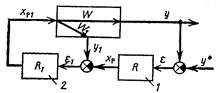
Рис 3.32. Структурная схема АСР.
Выбор законов регулирования определяется назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую.
от вспомогательного регулятора требуется прежде всего быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура в каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (как будет показано ниже, при этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис 3.33 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, в которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор 1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменение входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода 1.
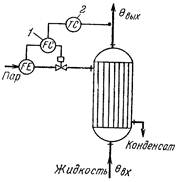
Рис. 3.33. Каскадная система регулирования температуры (2)
с коррекцией задания регулятору расхода пара (1).
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значение одного и того же технологического параметра в разных точках системы (рис. 3.34).
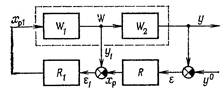
Рис.3.34. Структурная схема каскадной АСР
с измерением вспомогательной координаты в промежуточной точке
На рис 3.35 показан фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие – расход пара – подается на вход теплообменника. Канал регулирования, включающий два аппарата и трубопроводы, является сложной динамической системой с большой инерционностью. На объект действует ряд возмущений, поступающих в разные точки системы, - давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т.п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе между теплообменником и реактором.
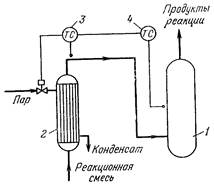
Рис 3.35. Каскадная система регулирования температуры (4) в реакторе (1)
с коррекцией задания регулятору температуры (3) на входе теплообмена (2)
Системы связанного регулирования. Автономные АСР.Основой построения систем связанного регулирования является принцип автономности. Применительно к объекту с двумя входами и выходами понятие автономности означает взаимную независимостью выходных координат у1 и у2 при работе двух замкнутых систем регулирования.
По существу, условие автономности складывается из двух условий инвариантности: инвариантности первого выхода у1 по отношению к сигналу второго регулятора хР2 и инвариантности второго выхода у2 по отношению к сигналу первого регулятора хР1:
у1 (t, хР2)=0; у2 (t, хР12)=0; Vt, хР1, хР2
При этом сигнал хР1 можно рассматривать как возмущение для у2, а сигнал хР2. - как возмущения для у1 .
В химической технологии одним из самых сложных многосвязных объектов является процесс ректификации. Даже в простейших случаях – при разделении бинарных смесей – в ректификационной колонне можно выделить несколько взаимосвязанных координат (рис. 3.36).
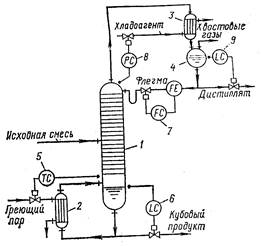
Рис. 3.36. Пример системы регулирования объекта с несколькими входами и выходами:
1- ректификационная колонна; 2 – кипятильник; 3 – дефлегматор;
4 – флегмовая емкость; 5 – регулятор температуры; 6, 9 – регуляторы уровня;
7 – регулятор расхода; 8 – регулятор давления.
Например, для регулирования процесса в нижней части колонны необходима стабилизация минимум двух технологических параметров, характеризующих материальный баланс по жидкой фазе и по одному из компонентов. Для этой цели обычно выбирают уровень жидкости в кубе и температуру под первой тарелкой, а в качестве регулирующих входных сигналов – расход греющего пара и отбор кубового продукта. Однако каждое из регулирующих воздействий влияет на оба выхода: при изменении расхода греющего пара изменяется интенсивность испарения кубового продукта, а вследствие этого – уровень жидкости и состав пара. Аналогично изменение отбора кубового продукта влияет не только на уровень в кубе, но и на флегмовое число, что приводит к изменению состава пара в нижней части колоны.
Для регулирования процесса в верхней части в качестве выходных координат можно выбрать давление и температуру выходных координат можно выбрать давление и температуру пара, а в качестве регулирующих входных параметров - подачу хладоагента в дефлегматор и флегмы на орошение колонны. Очевидно, обе входные координаты влияют на давление и температуру в колонне в ходе тепловых и массообменных процессов.
Наконец, рассматривая систему регулирования температуры одновременно в верхней и нижней частях колонны подачей соответственно флегмы и греющего пара, также получим систему несвязанного регулирования объекта с внутренними перекрестными связями.
Дискретные автоматические системы регулирования
3.10.1. Понятия о дискретных АСР и их классификация В непрерывных системах существуют только непрерывные сигналы, являющиеся… Преобразование непрерывного сигнала в дискретный называется квантованием сигнала. Существует два основных вида…Автоматезированные системы управления
Технологическими процессами (АСУТП)
Общая характеристика АСУТП.
Совокупность совместно функционирующих АСУТП и ТОУ называется автоматизированным технологическим комплексом (АТК). АСУТП отличает преобладание задач оперативного управления ТОУ над задачами… АСУТП, в отличии от АСР локального типа, решает задачи управления технологическим процессом как единым целым во всей…Назначение, цель и функции АСУТП
АСУТП предназначена для целенаправленного управления технологическими процессом и обеспечения информацией смежных и вышестоящих автоматизированных систем управления. Например, технологи-операторы получают оперативную информацию в едином темпе (реальном времени) с технологическим процессом, что позволяет им своевременно вмешаться в ход процесса, корректировать режимы и нагрузки машин и установок.
Целью АСУТП является обеспечение оптимального в определенном смысле функционирования технологического процесса, например, получение максимального экономического эффекта с учетом плановых, экономических и технических ограничений. В частном случае это может быть максимальная производительность технологического процесса при заданном качестве продукта и исходного сырья, минимальная себестоимость продукции, минимальный расход дорого сырья и т.п.
Функцией АСУТП называется совокупность ее действий направленных на достижения определенной цели. Различают три функции АСУТП: управляющую, информационную и вспомогательную. К управляющей функции АСУТП относятся: программные изменения режима (пуск – остановка машин и агрегатов, аварийные блокировки, распределение нагрузки между агрегатами и т.п.); логическое управление, например, определение «узкого места» и согласования нагрузок технологического оборудования; оптимизация установившегося режима технологического процесса в целом и режимов отдельных видов технологического оборудования; оптимальное управление переходными режимами управляемого процесса; автоматическое регулирование и стабилизация отдельных параметров технологического процесса с помощью одноконтурных, комбинированных и многосвязанных АСР; реализация управления исполнительными органами. Информационная функция включает получение, обработку и передачу информации о состоянии ТОУ или внешней сферы.
На вспомогательные функции АСУТП возлагаются контроль за правильностью ее функционирования, реализация и контроль информационного обмена с системами управления более высокого уровня, слежения за астрономическим временем и отсчет временных интервалов, воздействия на соответствующие средства АСУТП т.д.
На рис.4.11 приведена обобщенная функциональная структура АСУТП, основными элементами которой являются информационная и управляющая подсистемы, а также операторы технологического процесса и комплекса технических средств (КТС) АСУТП.

Рис 4.1 Обобщенная функциональная структура АСУТП
Упрощенная структура комплекса технических средств (КТС) АСУТП
Структура КТС АСУТП представлена на рис.4.2. на ней выделены устройства сопряжения УВМ с управляемым объектом (УСО), устройство сбора, передачи и преобразовании информации и устройство выдачи сигналов из УВМ на объект управления. Как видно, существуют два основных потока информации: измерительный от датчиков к УВМ и управляющей (командной) от УВМ к исполнительным устройствам объекта.
Обмен информацией между отдельными устройствами происходит через интерфейсы, с помощью которых передаются стандартные форматы информации. Интерфейс П обслуживает процессор, а интерфейс В предназначен для устройств ввода - вывода.
Сигналы в УСО и каналы связи.Диапазоны изменения информационных параметров в сигналах унифицированы и утверждены соответствующими стандартами. Аналоговая информация в каналах АСУТП передается сигналами как низкого (0…100 или –50 …+50 мВ), так и высокого (0… 10 В; 0…24 В) уровня. Передача дискретной информации осуществляется в основном с помощью сигналов высокого уровня (0… 10 В; 0…24 В или 0…5 mА; 4…20 мА).
Коммутаторы сигналов.Применение коммутаторов сигналов способствует сокращению объема оборудования необходимого для организации приема и выдачи сигналов. По функциональному значению коммутатор подключает раздельно во времени выходы и входы нескольких датчиков и исполнительных устройств к входам приемников информации.
Преобразователи. УСО содержат в качестве основных устройств не только коммутаторы, но и преобразователи АЦП и ЦАП. В результате преобразования на выходе АЦП вырабатывается цифровой код, числовое значение которого соответствует величине преобразованного аналогового сигнала. В преобразователе ЦАП цифровой код однозначно преобразуется в выходную величину (ток, напряжение и т.д.).
Техническое обеспечение распределенных АСУТП
Общая характеристика аппаратурной основы АСУТП
Внедрение микропроцессоров в самые различные устройства автоматики на всех уровнях управления создало насыщение цифровым «интеллектом» большинство…Автоматизация производственных процессов
Нефтепереработки и нефтехимии
Элементы техники проектирования систем автоматизации
Несмотря на большое разнообразие химических производств, между ними есть… 1. Гидромеханических (перемещение жидкостей и газов; смешение жидкостей; отстаивание жидких систем, центрифугирование…Изображение на функциональных схемах технологических аппаратов, машин, трубопроводов и трубопроводной арматуры.
Технологические машины и аппараты на функциональной схеме изображают упрощенно [35], но в соответствии со схемой, принятой в технологической части проекта. Контуры графических изображений аппаратов и машин, а также соотношение их габаритных размеров должны соответствовать, как правило, действительным.
Около каждого аппарата и машины должно быть дано наименование или позиционное обозначение (арабскими цифрами). Наименование может быть вписано внутри условного графического изображения аппарата (машины). Разрешается использовать и буквенно-цифровые обозначения аппаратов (машин), например Т-3, Е-5, Н-8, где буква означает название аппарата (Т-теплообменник, Е- емкость, Н-насос), а цифра порядковый номер аппарата среди ему подобных.
Трубопроводы и арматура также обозначаются в соответствии с ГОСТами[35].
Изображение на функциональных схемах автоматических устройств и линий связи между ними. На функциональных схемах автоматизации условно показывают все средства, используемые для автоматического управления процессом, кроме вспомогательной аппаратуры (фильтров, редукторов и т.п.).
Для изображения автоматических устройств используют отрослевой стандарт ОСТ 36-27-77, «Обозначение условия в схемах автоматизации технологических процессов».
Измеряемые параметры обозначают следующим образом:
| Измеряемые параметры | Обозначение |
| Плотность | D |
| Электрическая величина (любая) | E |
| Расход | F |
| Размер, положение, перемещение | G |
| Время | K |
| Уровень | L |
| Влажность | M |
| Давление, вакуум | P |
| Состав, концентрация и т.п. | Q |
| Радиоактивность | R |
| Скорость, частота | S |
| Температура | T |
| Несколько разнородных измеряемых величин | U |
| Вязкость | V |
| Масса | W |
| Функции, выполняемые приборами по отображению информации, обозначают следующим образом: | |
| Сигнализация | A |
| Показания регистрация | I |
| Регистрация | R |
| Функции, выполняемые приборами по формированию выходного сигнала, обозначаются следующим образом: | |
| Регулирование | С |
| Включение, отключение, переключение (эту букву не следует применять для обозначения функции регулирования, в том числе двухпозиционного) | S |
На рис.5.1 приведен пример построения условного обозначения прибора для измерения, регистрации и регулирования перепада давлений.
Рис.5.1. Пример построения условного обозначения
прибора для измерения, регистрации
и регулирования перепада давления.
Все буквенные обозначения проставляются в верхней части окружности (эллипса), а в нижней части – позиционное обозначение.
Применяют два способа построения функциональных схем автоматизации: развернутый (рис.5.2) и упрощенный (рис.5.3).
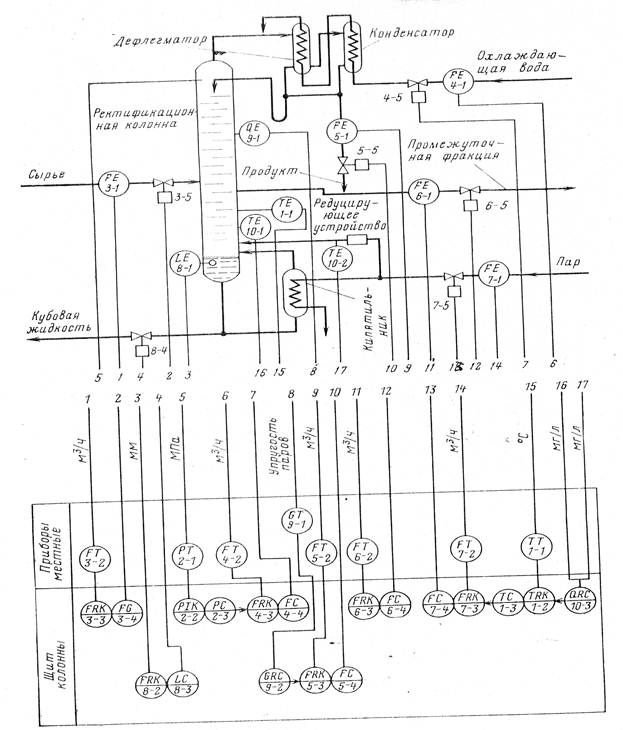
Рис. 5.2. Пример выполнения функциональной схемы
по первому способу с изображением приборов по ОСТ 36-27-77.

Рис. 5.3. Пример выполнения функциональной схемы
по второму способу с изображением приборов по ОСТ 36-27-77.
При развернутом способе каждый прибор или блок, входящий в единый комплекс, изображают отдельным графическим обозначением.
Обозначения аппаратуры помещают в прямоугольниках в нижней части листа.
При упрощенном способе не показывают первичные измерительные преобразователи и всю вспомогательную аппаратуру. приборы и средства автоматизации, осуществляющие сложные функции (контроль, регулирование, сигнализацию и т.п.) и выполненные в виде отдельных блоков, показывают одним условным графическим изображением. Такой способ прост и менее трудоемок, но не дает представления о месте размещения автоматических устройств (на щитах, пультах, в шкафах).
Развернутый способ построения условных обозначений более полно раскрывает решения по автоматизации, по этому им пользуются чаще. для него установлены дополнительные буквенные обозначения, способы размещения преобразователей и вычислительных устройств.
Автоматизация производства нефтепродуктов
Обезвоженная и обессоленная нефть (после блока ЭЛОУ) поступает в колонну отбензинивания 1 (рис.5.4), где происходит испарение легкокипящих фракций… В нижнюю часть колонны 14 подается водяной пар для более полного извлечения… В каждую секцию подается водяной пар, способствующий извлечению легких фракций. Эти фракции возвращаются в колонну 14,…Процесс замедленного коксования
Автоматическая система контроля и регулирования режима трубчатой печи установки замедленного коксования предназначена для стабилизации основных… На установках замедленного коксования первичное сырье (смесь гудрона или… Для создания высоких скоростей и предотвращения коксоотложения в трубах печи в поток вторичного сырья при входе в печь…Автоматизация управления процессами производства
Некоторых органических продуктов
Производство олефинов основано на термическом разложении углеводородного сырья на ряд продуктов и выделении этих продуктов с заданной степенью… Технологическая схема производства. Схема включает две основные уста- новки:… Топливом для обогрева змеевика служат метано-водородная фракция или тяжелые жидкие фракции, получаемые при пиролизе.…Автоматизация управления прцессами производства
Синтетического каучука
5.4.1. Автоматизация производства бутадиен-стирольного каучука 5.4.1.1. Технологическая схема производства. Бутадиен-концентрат,… Процесс полимеризации осуществляется в эмульсии в присутствии компонентов окислительно-восстановительной системы и…Автоматизация производства изопренового каучука
Процесс полимеризации осуществляют в полимеризационной батарее, состоящей из шести полимеризаторов (2 - 7), в растворе инертного углеводородного… После стопперирования и заправки антиоксидантом дезактивированный полимеризат… В смесителе 14 происходит смешение полимеризата с циркуляционной во-дой. Образовавшаяся эмульсия полимеризата из…– Конец работы –
Используемые теги: Автоматизация, химических, производств0.059
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.15 сек.
Новости и инфо для студентов