рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Автоматического управления
Реферат Курсовая Конспект
Автоматического управления
Автоматического управления - раздел Философия, АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ Замена Ручного Труда Человека В Операциях Управления На Управ...
Замена ручного труда человека в операциях управления на управление с помощью технических средств называется автоматизацией. Технические средства, с помощью которых выполняются операции управления, называются средствами автоматизации или автоматическими устройствами.
Аппарат, оборудование в которых протекает управляемый технологический процесс, называется объектом управления. Совокупность объекта управления и средств автоматического управления называются автоматической системой управления (АСУ).
Технологические процессы находятся под воздействием внутренних и внешних возмущений, нарушающих равновесный режим. Поэтому к технологическому процессу извне или изнутри прикладываются управляющие воздействия так, чтобы скомпенсировать указанные возмущения. Системы, вырабатывающие на основе информации о состояние управляемого процесса определенный алгоритм (закон) управления, нейтрализующий действие возмущающих воздействий и приводящий управляемую величину к заданному значению, называются автоматическими системами регулирования (АСР).
В этом случае термин «управление» заменяется на термин «регулирование»: объект регулирования, автоматическая система регулирования, автоматическое регулирование, регулируемая величина, автоматический регулятор и т.д.
Технологический параметр, который необходимо поддерживать в данных пределах в соответствии с технологическими требованиями называется регулируемым параметром или регулируемой величиной. Значение регулируемой величины, которое необходимо поддерживать в данный момент, называется заданным значением,а измеренное в данный момент – текущим.
Объектом регулирования (ОР) называется аппарат, оборудование или технологический процесс, в котором происходит изменение регулируемой величины в результате управляющих воздействий. Управляющее воздействие на объект регулирования осуществляется путем регулирования подачи материалов или энергии.
В общем случае задачи системы управления значительно шире: в системе регулирования заданное значение регулируемой величины или закон ее изменения заранее известны и АСР должна всегда приводить управляемую (регулируемую) величину к этому значению, а в системе управления должен вырабатываться такой закон изменения управляемой величины, который наилучшим образом обеспечит функционирование системы, выполнение технологического процесса в соответствии с изменившимися параметрами ОР и внутренними и внешними возмущениями.
В теплоэнергетических аппаратах (установках), например, управляющее воздействие на ОР осуществляется изменением положения заслонок, задвижек, шиберов, различных клапанов, перекрывающий трубопроводы, а сами управляющие воздействия формируются регулятором, который вместо человека-оператора обеспечивает изменение регулируемой величины по заданному закону.
Рассмотрим обобщенную функциональную схему АСР (рис. 1.1.), в которой с определенной степенью детализации представленны основные устройства для выполнения определенных функций (датчики, усилители, управляющие устройства, исполнительные механизмы, регулирующие органы и т.д.).
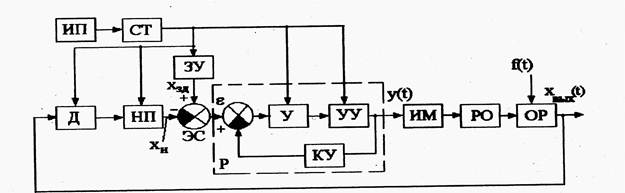
Рис 1.1.Обобщеннная функциональная схема АСР.
Непременным элементом АСР является объект регулирования ОР, на который воздействуют как возмущающие воздействия f(t)(например, изменение нагрузки объекта), так и управляющее воздействие y(t), а на выходе характеризуется регулируемой величиной хВЫХ (t).
Датчик Д дает информацию о величине какого-либо параметра технологического процесса, протекающего в ОР. Нормирующий преобразователь НП служит для преобразования естественного сигнала с выхода датчика в унифицированный сигнал ГСП. Задающее устройству ЗУ вводит в систему сигнал задания хзд . Элемент сравнения ЭС сравнивает сигнал хзд с величиной хи от измерительного устройства (Д,НП). При наличие рассогласования e= хзд- хи создается регулирующее воздействие на объект, стремящееся свести к минимуму рассогласование. Система будет находиться в состояние покоя (равновесия) при отсутствие рассогласования.
Регулятор Р (совокупность усилителя У, устройства управления УУ и корректирующего устройства КУ) предназначен для коммутации и алгебраического суммирования сигналов измерительного и задающего устройств, выработки требуемого закона регулирования и управляющих (регулирующих) воздействий у(t) на исполнительный механизм ИМ, перемещающий регулирующий орган РО, который изменяет количество поступающего вещества или энергии в объект в целях приведения регулируемой величины ОР к заданному значению.
Для работы АСР необходимы источники питания ИП элементов и устройств автоматики (для пневматических систем это компрессорная станция, а для электрических систем это автономные источники питания в виде трансформаторов, преобразователей тока, аккумуляторов, мотор-генераторов). Стабилизаторы СТ служат для снижения помех питания средств автоматики.
В зависимости от характера информации об объекте управления (ОУ) автоматические системы управления подразделяются на разомкнутые и замкнутые (рис 1.2).
Разомкнутые системы работают по жесткой программе не зависимо от состояний объекта в процессе управления и изменяющихся внешних условий фактического протекания процесса. Внешние возмущения f(t) приводят к соответствующим неуправляемым отклонениям выполняемого процесса в объекте. Эти возмущения - непредсказуемые факторы, вызывающие нарушения нормального протекания процесса.

Рис. 1.2. Структуры разомкнутой (а) и замкнутой (б) систем управления: хвх (t) и хвых (t) – соответственно входная и выходная величины; у(t) – управляющее воздействие, вырабатываемое управляющим устройством (УУ); f(t) – возмущающие воздействие; De=e(t) – сигнал рассогласования (или ошибка).
Замкнутые системы управления работаю на основе информации о протекаемом процессе и при любых нарушениях его, связанных, например, с изменившимися внешними условиями, вырабатывают соответствующее, воздействие, ликвидирующее отклонение выполняемого процесса. В этих системах существует обратная связь–информация о состояние управляемого процесса (объекта) передается с выхода системы на вход управляющего устройства (регулятора).
– Конец работы –
Эта тема принадлежит разделу:
АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Омский государственный технический университет... С Ф Абдулин...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Автоматического управления
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.034 сек.
Новости и инфо для студентов