рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Структурная схема гидропривода. Классификация и принцип работы гидроприводов. Рабочие жидкости для гидросистем. Гидравлические линии. Насосы и гидромоторы. Гидроцилиндры
Реферат Курсовая Конспект
Структурная схема гидропривода. Классификация и принцип работы гидроприводов. Рабочие жидкости для гидросистем. Гидравлические линии. Насосы и гидромоторы. Гидроцилиндры
Структурная схема гидропривода. Классификация и принцип работы гидроприводов. Рабочие жидкости для гидросистем. Гидравлические линии. Насосы и гидромоторы. Гидроцилиндры - раздел Философия, Оглавление ...
Оглавление
Введение. 4
1. Общая характеристика привода. 5
1.1. Структурная схема гидропривода. 5
1.2. Классификация и принцип работы гидроприводов. 6
1.3. Преимущества и недостатки гидропривода. 8
2. Рабочие жидкости для гидросистем. Гидравлические линии. 9
2.1. Характеристика рабочих жидкостей. 9
2.2. Выбор и эксплуатация рабочих жидкостей. 10
2.3. Гидравлические линии. 11
2.4. Соединения. 12
2.5. Расчет гидролиний. 15
3. Насосы и гидромоторы.. 17
3.1. Некоторые термины и определения. 17
3.2. Гидравлические машины шестеренного типа. 18
3.3. Пластинчатые насосы и гидромоторы.. 20
3.4. Радиально-поршневые насосы и гидромоторы.. 23
3.5. Аксиально-поршневые насосы и гидромоторы.. 26
4. Гидроцилиндры.. 29
4.1. Механизмы с гибкими разделителями. 29
4.2. Классификация гидроцилиндров. 30
4.3. Гидроцилиндры прямолинейного действия. 31
4.4. Расчет гидроцилиндров. 33
4.5. Поворотные гидроцилиндры.. 34
5. Гидрораспределители. 36
5.1. Общие сведения. 36
5.2. Золотниковые гидрораспределители. 37
5.3. Крановые гидрораспределители. 42
5.4. Клапанные гидрораспределители. 43
6. Регулирующая и направляющая аппаратура. 44
6.1. Общие сведения о гидроаппаратуре. 44
6.2. Напорные гидроклапаны.. 45
6.3. Редукционный клапан. 48
6.4. Обратные гидроклапаны.. 49
6.5. Ограничители расхода. 50
6.6. Делители (сумматоры) потока. 51
6.7. Дроссели и регуляторы расхода. 52
7. Вспомогательные устройства гидросистем.. 56
7.1. Гидробаки и теплообменники. 56
7.2. Фильтры.. 58
7.3. Уплотнительные устройства. 64
7.4. Гидравлические аккумуляторы.. 67
7.5. Гидрозамки. 69
7.6. Гидравлические реле давления и времени. 72
7.7. Средства измерения. 76
8. Гидравлические следящие приводы (гидроусилители). 80
8.1. Общие сведения. 80
8.2. Классификация гидроусилителей. 82
8.3. Гидроусилитель золотникового типа. 82
8.4. Гидроусилитель с соплом и заслонкой. 83
8.5. Гидроусилитель со струйной трубкой. 84
8.6. Двухкаскадные усилители. 85
9. Системы разгрузки насосов и регулирования гидродвигателей. 86
9.1. Способы разгрузки насосов от давления. 86
9.2. Дроссельное регулирование. 87
9.3. Объемное регулирование. 89
9.4. Комбинированное регулирование. 92
9.5. Сравнение способов регулирования. 93
10. Системы типовых гидросистем.. 94
10.1. Гидросистемы с регулируемым насосом и дросселем.. 94
10.2. Гидросистемы с двухступенчатым усилением.. 96
10.3. Гидросистемы непрерывного (колебательного) движения. 97
10.4. Электрогидравлические системы с регулируемым насосом.. 98
10.5. Гидросистемы с двумя спаренными насосами. 99
10.6. Питание одним насосом двух и несколько гидродвигателей. 100
11. Пневматический привод. 101
11.1. Общие сведения о применении газов в технике. 102
11.2. Особенности пневматического привода, достоинства и недостатки. 103
11.3. Течение воздуха. 106
11.4. Подготовка сжатого воздуха. 109
11.5. Исполнительные пневматические устройства. 112
Список литературы.. 115
Введение
Предшественники современных гидравлических машин появились в глубокой древности. Освоение плодородных земель, уровень которых выше уровня воды ближайших водоемов, а также необходимость водообеспечения поселений потребовал создания различных водоподъемных средств.
Древнейший известный нам механизм - водоподъемное колесо - поднимал 8 м3 воды в час на высоту 3 метра. В 1700 г. до н.э. в Каире для подъема воды из колодца глубиной 90 м использовали так называемый цепной насос (цепь с прикрепленными ковшами). Архимедов винт стали применять для орошения полей за 1000 лет до н.э. Наклонно расположенный вал с винтовой нарезкой вращался в полуоткрытом лотке и обеспечивал подъем воды на высоту до 5 м.
Первым насосом был поршневой. Изобретателем его считают древнегреческого механика Ктезебия (II - I в. до н.э.). Насос был описан Героном Александрийским в I в. до н.э. в труде "Пневматика".
Постепенно в процессе трудовой деятельности люди накапливали знания о закономерностях движения жидкости и газов. Это нашло отражение в трудах древнегреческого философа Аристотеля. Некоторые законы гидравлики были сформулированы величайшим механиком Древней Греции Архимедом.
Отсутствие приводного двигателя тормозило развитие гидравлических машин. Только благодаря разделению труда и развитию мануфактуры в XVI - XVII вв. были созданы условия для широкого использования водяного колеса, а затем паровой машины в качестве двигателей.
Впервые идею применения в машинах гидропривода высказал в конце XVII века Блез Паскаль, который указывал на возможность создания гидравлического пресса. Эта идея Паскаля была реализована в 1859-1861 гг. Хайзвеллом при разработке конструкции первого гидравлического штамповочного пресса. В дальнейшем гидропривод долгое время применялся лишь при создании кузнечно-прессового оборудования.
Появление паровых машин в XVIII в. было обусловлено, прежде всего, необходимостью привода насосов для откачки воды из шахт. Неглубокие выработки к этому времени уже истощились, а основной проблемой было удаление грунтовых вод из глубоких шахт, которые не позволяли вести добычу полезных ископаемых.
С развитием паровых машин и общим технологическим прогрессом в машиностроении тесно связано совершенствование конструкций поршневых насосов, появление и совершенствование гидравлических двигателей. Далее широкое применение двигателей внутреннего сгорания и электропривода в конце XIX - начале XX вв. послужило сильнейшим толчком в развитии гидравлических приводов.
В настоящее время во всем мире практически невозможно назвать такую отрасль промышленности или сельского хозяйства, в которых не применялся бы гидропривод. А возросшие в последние годы темпы создания и освоения серийного производства новых машин с гидравлическим приводом являются наглядным подтверждением научно- технического прогресса.
Использование гидроприводов в строительных и дорожных машинах способствует значительному повышению уровня механизации в этих отраслях. Гидравлические устройства устанавливаются в системах управления на экскаваторах, бульдозерах, подъемниках, погрузчиках, кранах, а также в качестве силовых передач на движитель этих машин.
В результате внедрения современных технологических процессов и совершенствования гидравлического оборудования и машин с объемным гидроприводом за последние два десятилетия значительно улучшилось качество их изготовления, повысились продолжительность безотказной работы и технический ресурс.
Перспективным является использование гидравлических и пневматических передач в сочетании с электрическими для автоматизации технологических процессов во многих отраслях народного хозяйства с целью повышения производительности и улучшения условий труда.
1. Общая характеристика привода
1.1. Структурная схема гидропривода
Гидроприводом называется совокупность устройств, предназначенных для приведения в движение механизмов и машин посредством рабочей жидкости, находящейся под давлением, с одновременным выполнением функций регулирования и реверсирования скорости движения выходного звена гидродвигателя.
Гидроприводы могут быть двух типов: гидродинамические и объемные. В гидродинамических приводах используется в основном кинетическая энергия потока жидкости. В объемных гидроприводах используется потенциальная энергия давления рабочей жидкости.
Объемный гидропривод состоит из гидропередачи, устройств управления, вспомогательных устройств и гидролиний (рис.1.1).

Рис.1.1. Схема объемного гидропривода
Объемная гидропередача, являющаяся силовой частью гидропривода, состоит из объемного насоса (преобразователя механической энергии приводящего двигателя в энергию потока рабочей жидкости) и объемного гидродвигателя (преобразователя энергии потока рабочей жидкости в механическую энергию выходного звена).
В состав некоторых объемных гидропередач входит гидроаккумулятор (гидроемкости, предназначенные для аккумулирования энергии рабочей жидкости, находящейся под давлением, с целью последующего ее использования для приведения в работу гидродвигателя). Кроме того, в состав гидропередач могут входить также гидропреобразователи - объемные гидромашины для преобразования энергии потока рабочей жидкости с одними значениями давления P и расхода Q в энергию другого потока с другими значениями P и Q.
Устройства управления предназначены для управления потоком или другими устройствами гидропривода. При этом под управлением потоком понимается изменение или поддержание на определенном уровне давления и расхода в гидросистеме, а также изменение направления движения потока рабочей жидкости. К устройствам управления относятся:
гидрораспределители, служащие для изменения направления движения потока рабочей жидкости, обеспечения требуемой последовательности включения в работу гидродвигателей, реверсирования движения их выходных звеньев и т.д.;
регуляторы давления (предохранительный, редукционный, переливной и другие клапаны), предназначенные для регулирования давления рабочей жидкости в гидросистеме;
регуляторы расхода (делители и сумматоры потоков, дроссели и регуляторы потока, направляющие клапаны), с помощью которых управляют потоком рабочей жидкости;
гидравлические усилители, необходимые для управления работой насосов, гидродвигателей или других устройств управления посредством рабочей жидкости с одновременным усилением мощности сигнала управления.
Вспомогательные устройства обеспечивают надежную работу всех элементов гидропривода. К ним относятся: кондиционеры рабочей жидкости (фильтры, теплообменные аппараты и др.); уплотнители, обеспечивающие герметизацию гидросистемы; гидравлические реле давления; гидроемкости (гидробаки и гидроаккумуляторы рабочей жидкости) и др.
Состав вспомогательных устройств устанавливают исходя из назначения гидропривода и условий, в которых он эксплуатируется.
Гидролинии (трубы, рукава высокого давления, каналы и соединения) предназначены для прохождения рабочей жидкости по ним в процессе работы объемного гидропривода. В зависимости от своего назначения гидролинии, входящие в общую гидросистему, подразделяются на всасывающие, напорные, сливные, дренажные и гидролинии управления.
1.2. Классификация и принцип работы гидроприводов
В зависимости от конструкции и типа входящих в состав гидропередачи элементов объемные гидроприводы можно классифицировать по нескольким признакам.
1. По характеру движения выходного звена гидродвигателя:
гидропривод вращательного движения (рис.1.2, а), когда в качестве гидродвигателя применяется гидромотор, у которого ведомое звено (вал или корпус) совершает неограниченное вращательное движение;
гидропривод поступательного движения (рис.1.2, б, в), у которого в качестве гидродвигателя применяется гидроцилиндр - двигатель с возвратно-поступательным движением ведомого звена (штока поршня, плунжера или корпуса);
гидропривод поворотного движения (рис.1.2, г), когда в качестве гидродвигателя применен поворотный гидроцилиндр, у которого ведомое звено (вал или корпус) совершает возвратно-поворотное движение на угол, меньший 360 .
2. По возможности регулирования:
регулируемый гидропривод, в котором в процессе его эксплуатации скорость выходного звена гидродвигателя можно изменять по требуемому закону. В свою очередь регулирование может быть дроссельным (рис.1.2, б, г), объемным (рис.1.2, а), объемно-дроссельным или изменением скорости двигателя, приводящего в работу насос. Регулирование может быть ручным или автоматическим. В зависимости от задач регулирования гидропривод может быть стабилизированным, программным или следящим. Регулированию гидропривода будет посвящена отдельная лекция;
нерегулируемый гидропривод, у которого нельзя изменять скорость движения выходного звена гидропередачи в процессе эксплуатации.
3. По схеме циркуляции рабочей жидкости:
гидропривод с замкнутой схемой циркуляции (рис.1.2, а), в котором рабочая жидкость от гидродвигателя возвращается во всасывающую гидролинию насоса. Гидропривод с замкнутой циркуляцией рабочей жидкости компактен, имеет небольшую массу и допускает большую частоту вращения ротора насоса без опасности возникновения кавитации, поскольку в такой системе во всасывающей линии давление всегда превышает атмосферное. К недостаткам следует отнести плохие условия для охлаждения рабочей жидкости, а также необходимость спускать из гидросистемы рабочую жидкость при замене или ремонте гидроаппаратуры;
гидропривод с разомкнутой системой циркуляции (рис.1.2, б, в, г), в котором рабочая жидкость постоянно сообщается с гидробаком или атмосферой. Достоинства такой схемы - хорошие условия для охлаждения и очистки рабочей жидкости. Однако такие гидроприводы громоздки и имеют большую массу, а частота вращения ротора насоса ограничивается допускаемыми (из условий бескавитационной работы насоса) скоростями движения рабочей жидкости во всасывающем трубопроводе.
4. По источнику подачи рабочей жидкости: насосные гидроприводы, в которых рабочая жидкость подается в гидродвигатели насосами, входящих в состав этих гидроприводов;
аккумуляторные гидроприводы, в которых рабочая жидкость подается в гидродвигатели из гидроаккумуляторов, предварительно заряженных от внешних источников, не входящих в состав данных гидроприводов;
магистральные гидроприводы, в которых рабочая жидкость подается к гидродвигателям от специальной магистрали, не входящей в состав этих приводов.
5. По типу приводящего двигателя гидроприводы могут быть с электроприводом, приводом от ДВС, турбин и т.д.
Принцип работы объемного гидропривода основан на законе Паскаля, по которому всякое изменение давления в какой-либо точке покоящейся жидкости, не нарушающее ее равновесия, передается в остальные ее точки без изменения (рис.1.2).
Насосом 1 рабочая жидкость подается в напорную гидролинию 3 и далее через распределитель 5 к гидродвигателю 2. При одном положении гидрораспределителя совершается рабочий ход гидродвигателя, а при другом положении - холостой. Из гидродвигателя жидкость через распределитель поступает в сливную гидролинию и далее или в гидробак 9, или во всасывающую гидролинию насоса (в гидроприводах с замкнутой схемой циркуляции рабочей жидкости, см. рис.1.2, а). В резервуаре жидкость охлаждается и снова поступает в гидросистему. Надежная работа гидропривода возможна только при соответствующей очистке рабочей жидкости фильтрами 8.
Регулирование скорости движения выходного звена гидродвигателя может быть дроссельным или объемным. При дроссельном регулировании в гидросистеме устанавливаются нерегулируемые насосы, а изменение скорости движения выходного звена достигается изменением расхода рабочей жидкости через дроссель 6. При объемном регулировании скорость движения выходного звена гидродвигателя изменяется подачей регулируемого насоса либо за счет применения регулируемого гидромотора.
Защита гидросистемы от чрезмерного повышения давления обеспечивается предохранительным 4а или переливным 4б клапанами, которые настраиваются на максимально допустимое давление. Если нагрузка на гидродвигатель возрастает сверх установленной, то весь поток рабочей жидкости будет идти через предохранительный или переливной клапаны, минуя гидродвигатель. Контроль за давлением на отдельных участках гидросистемы осуществляется по манометрам 11.
Работа гидроагрегатов сопровождается утечками рабочей жидкости. В гидросистемах с замкнутой циркуляцией утечки компенсируются специальным подпитывающим насосом 1а (рис.1.2, а).
Ри.1.2. Варианты принципиальных схем гидроприводов:
а - с объемным регулированием; б - с дроссельным регулированием;
в - нерегулируемый; г - с дроссельным регулированием рабочего и холостого ходов
1.3. Преимущества и недостатки гидропривода
Широкое распространение гидропривода объясняется тем, что этот привод обладает рядом преимуществ перед другими видами приводов машин. Вот основные из них.
1. Бесступенчатое регулирование скорости движения выходного звена гидропередачи и обеспечение малых устойчивых скоростей. Минимальная угловая скорость вращения вала гидромотора может составлять 2…3 об/мин.
2. Небольшие габариты и масса. Время разгона, благодаря меньшему моменту инерции вращающихся частей не превышает долей секунды в отличие от электродвигателей, у которых время разгона может составлять несколько секунд.
3. Частое реверсирование движения выходного звена гидропередачи. Например, частота реверсирования вала гидромотора может быть доведена до 500, а штока поршня гидроцилиндра даже до 1000 реверсов в минуту. В этом отношении гидропривод уступает лишь пневматическим инструментам, у которых число реверсов может достигать 1500 в минуту.
4. Большое быстродействие и наибольшая механическая и скоростная жесткость. Механическая жесткость - величина относительного позиционного изменения положения выходного звена под воздействием изменяющейся внешней нагрузки. Скоростная жесткость - относительное изменение скорости выходного звена при изменении приложенной к нему нагрузки.
5. Автоматическая защита гидросистем от вредного воздействия перегрузок благодаря наличию предохранительных клапанов.
6. Хорошие условия смазки трущихся деталей и элементов гидроаппаратов, что обеспечивает их надежность и долговечность. Так, например, при правильной эксплуатации насосов и гидромоторов срок их службы доведен в настоящее время до 5…10 тыс. ч работы под нагрузкой. Гидроаппаратура может не ремонтироваться в течение долгого времени (до 10…15 лет).
7. Простота преобразования вращательного движения в возвратно-поступательное и возвратно-поворотные без применения каких-либо механических передач, подверженных износу.
Говоря о преимуществах гидропривода, следует отметить простоту автоматизации работы гидрофицированных механизмов, возможность автоматического изменения их режимов работы по заданной программе.
Гидроприводу присущи и недостатки, которые ограничивают его применение. Основные из них следующие.
1. Изменение вязкости применяемых жидкостей от температуры, что приводит к изменению рабочих характеристик гидропривода и создает дополнительные трудности при эксплуатации гидроприводов (особенно при отрицательных температурах).
2. Утечки жидкости из гидросистем, которые снижают КПД привода, вызывают неравномерность движения выходногозвена гидропередачи, затрудняют достижение устойчивой скорости движения рабочего органа при малых скоростях.
3. Необходимость изготовления многих элементов гидропривода по высокому классу точности для достижения малых зазоров между подвижными и неподвижными деталями, что усложняет конструкцию и повышает стоимость их изготовления.
4. Взрыво- и огнеопасность применяемых минеральных рабочих жидкостей.
5. Невозможность передачи энергии на большие расстояния из-за больших потерь на преодоление гидравлических сопротивлений и резкое снижение при этом КПД гидросистемы.
Со многими из этих недостатков можно бороться. Например, стабильность вязкости при изменении температуры достигается применением синтетических рабочих жидкостей. Окончательный выбор типа привода устанавливается при проектировании машин по результатам технико-экономических расчетов с учетом условий работы этих машин. Гидропривод, тем не менее, имеет преимущества по сравнению с другими типами приводов там, где требуется создание значительной мощности, быстродействие, позиционная точность исполнительных механизмов, компактность, малая масса, высокая надежность работы и разветвленность привода.
2. Рабочие жидкости для гидросистем. Гидравлические линии
В гидроприводе рабочая жидкость является энергоносителем, благодаря которому устанавливается связь между насосом и гидродвигателем. Кроме того, рабочая жидкость обеспечивает смазку подвижных частей элементов гидропривода. Физические свойства жидкостей подробно были изложены в [9, стр.10…15].
2.1. Характеристика рабочих жидкостей
В качестве рабочих жидкостей в гидравлическом приводе применяют минеральные масла, водомасляные эмульсии, смеси и синтетические жидкости. Выбор типа и марки рабочей жидкости определяется назначением, степенью надежности и условиями эксплуатации гидроприводов машин.
Минеральные масла получают в результате переработки высококачественных сортов нефти с введением в них присадок, улучшающих их физические свойства. Присадки добавляют в количестве 0,05…10%. Присадки могут быть многофункциональными, т.е. влиять на несколько физических свойств сразу. Различают присадки антиокислительные, вязкостные, противоизносные, снижающие температуру застывания жидкости, антипенные и т.д.
Водомасляные эмульсии представляют собой смеси воды и минерального масла в соотношениях 100:1, 50:1 и т.д. Минеральные масла в эмульсиях служат для уменьшения коррозионного воздействия рабочей жидкости и увеличения смазывающей способности. Эмульсии применяют в гидросистемах машин, работающих в пожароопасных условиях и в машинах, где требуется большое количество рабочей жидкости (например, в гидравлических прессах). Применение ограничено отрицательными и высокими (до 60 С) температурами.
Смеси различных сортов минеральных масел между собой, с керосином, глицерином и т.д. применяют в гидросистемах высокой точности, а также в гидросистемах, работающих в условиях низких температур.
Синтетические жидкости на основе силиконов, хлор- и фторуглеродистых соединениях, полифеноловых эфиров и т.д. негорючи, стойки к воздействию химических элементов, обладают стабильностью вязкостных характеристик в широком диапазоне температур. В последнее время, несмотря на высокую стоимость синтетических жидкостей, они находят все большее применение в гидроприводах машин общего назначения.
2.2. Выбор и эксплуатация рабочих жидкостей
Выбор рабочих жидкостей для гидросистемы машины определяется:
- диапазоном рабочих температур;
- давлением в гидросистеме;
- скоростями движения исполнительных механизмов;
- конструкционными материалами и материалами уплотнений;
- особенностями эксплуатации машины (на открытом воздухе или в помещении, условиями хранения машины, возможностями засорения и т.д.).
Диапазон рекомендуемых рабочих температур находят по вязкостным характеристикам рабочих жидкостей. Верхний температурный предел для выбранной рабочей жидкости определяется допустимым увеличением утечек и снижением объемного КПД, а также прочностью пленки рабочей жидкости.
Нижний температурный предел определяется работоспособностью насоса, характеризующейся полным заполнением его рабочих камер или пределом прокачиваемости жидкости насосом. При безгаражном хранении машин в зимнее время вязкость жидкостей становится настолько высокой, что в периоды пуска и разогрева гидросистемы насос некоторое время не прокачивает рабочую жидкость. В результате возникает "сухое" трение подвижных частей насоса, кавитация, интенсивный износ и выход насоса из строя. Таким образом, при применении рабочих жидкостей в условиях отрицательных температур пуску гидропривода в работу должен непременно предшествовать подогрев рабочей жидкости.
Максимальные и минимальные значения вязкости рабочих жидкостей в зависимости от типа насоса приведены в табл.2.1.
Таблица 2.1
Значения вязкости при крайних температурных пределах
Рабочее давление в гидросистеме и скорость движения исполнительного механизма также являются важными показателями, определяющими выбор рабочей жидкости. Утечки жидкости повышаются при увеличении давления, следовательно, было бы лучше применять рабочую жидкость с повышенной вязкостью. Но при этом будут увеличиваться гидравлические потери, и снижаться КПД гидропривода. Аналогичное влияние оказывает на рабочую жидкость скорость движения исполнительных механизмов. В настоящее время нет научно обоснованных рекомендаций по выбору рабочих жидкостей в зависимости от давления и скорости движения исполнительного механизма. Однако отмечается стремление при больших давлениях применять рабочую жидкость повышенной, а при низких давлениях - пониженной вязкости.
При эксплуатации гидросистем необходимо создавать такие условия, при которых рабочая жидкость по возможности дольше сохраняла бы свои первоначальные свойства. Для этого необходимо: не смешивать в одной таре свежую и бывшую в эксплуатации рабочие жидкости; пользоваться чистым заправочным инвентарем; не допускать смешивания рабочей жидкости с водой; не допускать попадания в жидкость пыли, песка, стружки и других механических частиц. При этом необходимо: фильтровать жидкость перед ее заливкой; герметично закрывать резервуары, содержащие рабочую жидкость. При работе гидропривода в широком диапазоне температур рекомендуется применять летние и зимние сорта рабочих жидкостей. Необходимо также после первого периода работы гидропривода в течение 50…100 ч заменять рабочую жидкость для ее фильтрации и очистки от продуктов износа в начальный период эксплуатации.
Наиболее распространенными являются два сорта рабочих жидкостей - ВМГЗ и МГ-30. Они позволяют заменить более 30 сортов специальных масел - индустриальных, турбинных, трансформаторных, дизельных, моторных, цилиндровых, веретенных и т.д.
2.3. Гидравлические линии
В гидросистемах машин отдельные элементы находятся на расстоянии друг от друга и соединяются между собой гидролиниями. Гидролинии должны обладать: - достаточной прочностью;
- минимальными потерями давления на преодоление гидравлических сопротивлений;
- отсутствием утечек жидкости;
- отсутствием в трубах воздушных пузырей.
Трубопроводы в зависимости от своей конструкции делятся на жесткие и гибкие.
Жесткие трубопроводы изготавливают из стали, меди, алюминия и его сплавов. Стальные применяют при высоких давлениях (до 320 ат). Трубы из сплавов алюминия применяют при давлениях до 150 ат и главным образом в гидросистемах машин с ограниченной массой (авиация). Медные трубопроводы при меньших давлениях (до 50 ат), там, где требуется изгиб труб под большими углами, что обеспечивает компактность гидросистемы, и применяются для дренажных линий.
Гибкие трубопроводы (рукава) бывают двух видов: резиновые и металлические. Для изготовления резиновых рукавов применяют натуральную и синтетическую резину. Рукав состоит из эластичной внутренней резиновой трубки, упрочненной наружной оплеткой или внутренним текстильным каркасом (рис.2.1). Их применяют тогда, когда соединяемые трубопроводом гидроагрегаты должны перемещаться относительно друг друга. При этом благодаря своей упругости резиновый рукава уменьшают пульсацию давления в гидросистеме. Они имеют следующие недостатки: подвижность при изменении давления; снижение общей жесткости гидросистемы; малая долговечность (1,5…3 года). Поэтому при проектировании гидросистем машин резиновых рукавов следует по возможности избегать.

Рис.2.1. Схемы конструкции рукавов с оплеткой:
1 - внутренний резиновый слой; 2 - металлическая оплетка;
3 - промежуточный резиновый слой; 4 - наружный резиновый слой
Металлические рукава имеют гофрированную внутреннюю трубу, выполненную из бронзовой или стальной ленты, и наружную проволочную оплетку. Между витками ленты находится уплотнитель. Рукава с хлопчатобумажным уплотнением предназначены для работы с температурой рабочей жидкости до 110 С, а с асбестовым уплотнением - до 300 С. Металлические рукава применяют в специфических условиях эксплуатации гидросистем, в контакте с агрессивными рабочими жидкостями.

Рис.2.2. Металлические рукава:
1 - профилированная лента; 2 - уплотнитель; 3 - проволочная оплетка
2.4. Соединения
Соединениями отдельные трубы и гидроагрегаты монтируются в единую гидросистему. Кроме того, соединения применяют и тогда, когда в гидросистеме необходимо предусмотреть технологические разъемы. Соединения могут быть неразборными и разборными.
Неразборные соединения применяют в недемонтируемых гидросистемах. Для соединения труб применяют сварку и пайку встык или используют муфты (переходные втулки) с прямыми с скошенными под углом 30 концами. При применении неразборных соединений масса гидролиний может быть уменьшена на 25…30% по сравнению с применением разборных соединений.
Разборные соединения (неподвижные и подвижные) - это соединения при помощи фланцев, штуцеров, ниппелей и других соединительных элементов.
Неподвижное разборное соединение может быть выполнено по наружному и внутреннему конусу, с врезающимся кольцом и фланцевое.
Соединение по наружному конусу (рис.2.3) состоит из трубопровода 1 с развальцованным на конус концом, ниппеля 2, штуцера 3 и накидной гайки 4. Герметичность соединения обеспечивается плотным прилеганием развальцованного конца трубы к наружной поверхности штуцера и соответствующей затяжкой накидной гайки. Недостатками такого соединения являются: уменьшение прочности трубы в месте р?струба; возможность образования незаметных для глаза кольцевых трещин; сравнительно большой момент затяжки накидной гайки; небольшое количество переборок; применение специализированного инструмента для развальцовки.
Рис.2.3. Соединение по наружному конусу
Неподвижное разборное соединение по внутреннему конусу (рис.2.4) состоит из ниппеля 4, приваренного или припаянного к трубе 5, штуцера 2 и накидной гайки 1. Герметичность соединения обеспечивается плотным прилеганием наружной поверхности ниппеля к внутренней поверхности штуцера и затяжной накидной гайки. Соединение по внутреннему конусу допускает большое количество переборок, а при его монтаже не происходит нежелательных деформаций в трубах и в соединительной арматуре. Благодаря сферической поверхности ниппеля допускается небольшой перекос труб.
Рис.2.4. Соединение по внутреннему конусу
Соединение с врезающимся кольцом (рис.2.5) состоит из штуцера 1 с внутренней конической поверхностью 2, накидной гайки 5 и врезающегося кольца 3. Кольцо изготовлено из стали с цементированной поверхностью, а его конец, обращенный к штуцеру, имеет режущую кромку. При затяжке соединения гайкой режущая кромка врезается в трубу 4, происходит деформация кольца, которое получает форму, соответствующую конической поверхности штуцера. В результате обеспечиваются требуемые прочность и герметичность соединения.
Рис.2.5. Соединение с врезающимся кольцом
К неподвижным разборным соединениям относится и фланцевое соединение (рис.2.6), которое применяют при монтаже гидросистем с трубами, имеющими диаметр условного прохода более 32 мм при рабочих давлениях до 32 МПа. Герметичность обеспечивается установкой между фланцами уплотнительных колец.
Рис.2.6. Фланцевое соединение
Подвижное разборное соединение применяется в гидросистемах землеройных, строительных, лесных и других машин. Здесь нередко применяют гидроцилиндры, которые должны поворачиваться на небольшой угол относительно оси, проходящей через точку крепления гидроцилиндра. При монтаже таких гидросистем применяют подвижные соединения, имеющие одну, две и более степеней свободы. На рис.2.7, а приведено поворотное соединение с одной степенью свободы, которое состоит из штуцера 1 и закрепленного на нем поворотного угольника 2. От осевого перемещения угольник стопорится шайбой 3 и кольцом 4. Герметичность соединения обеспечивается резиновыми кольцами 5 с защитными шайбами 6.
Другим примером подвижного соединения является свернутый в спираль трубопровод (рис.2.7, б). В этом случае спираль необходимо закрепить в двух точках (точки 1 и 2). Во время поворота гидроцилиндра спираль может растягиваться. Такой способ соединения может обеспечивать несколько степеней свободы.
Рис.2.7. Подвижное разборное соединение:
а - шарнирное; б - в виде трубы, свернутой в спираль
Способ заделки в концах гибких трубопроводов соединительной арматуры определяется давлением и конструкцией гибкого трубопровода. При давлении до 0,5 МПа (рис.2.8, а) конец рукава навинчивают на наконечник или на ниппель 1 с гребенчатой поверхностью и закрепляют хомутом 2. При давлениях до 10 МПа соединение конца рукава происходит в результате зажатия его между ниппелем и зажимной муфтой (обоймой). При таком способе (рис.2.8, б) рукав 1 ввинчивают в зажимную муфту 2, имеющую резьбу с большим шагом. Далее в муфту ввинчивают ниппель 3, который своей конусной поверхностью вдавливает конец рукава в резьбу муфты и зажимает его. Для давлений более 10 МПа муфту 2 обжимают в специальном цанговом приспособлении. Накидной гайкой 4 производят соединение рукава с гидрооборудованием.
Рис.2.8. Заделка концов рукавов:
а - при давлении до 0,5 МПа; б - при давлении свыше 10 МПа
2.5. Расчет гидролиний
Целью расчета гидролиний является определение внутреннего диаметра трубопроводов, потерь давления на преодоление гидравлических сопротивлений и толщины стенок труб.
Внутренний диаметр (условный проход) трубопровода d определяют по формуле

или

где Q - расход жидкости, м3/с для (2.1) и л/мин для (2.2);
υ- скорость движения жидкости, м/с;
d - внутренний диаметр трубопровода, м для (2.1) и мм для (2.2).
Скорость течения жидкости в трубопроводах зависит в основном от давления в гидросистеме (табл.2.2).
Таблица 2.2
Рекомендуемые значения скорости рабочей жидкости
Потеря давления на преодоление гидравлических сопротивлений по длине каждого участка трубопровода определяется по формуле
где ρ- плотность рабочей жидкости, кг/м3;
λ- коэффициент гидравлического трения;
l - длина трубопровода, м.
Если на пути движения рабочей жидкости встречаются местные сопротивления, то потеря давления в местных сопротивлениях определяется по формуле Вейсбаха
где ζ- коэффициент местных сопротивлений.
Значения коэффициентов ζ для наиболее распространенных видов местных сопротивлений принимают следующими: для штуцеров и переходников для труб ζ = 0,1…0,15; для угольников с поворотом под углом 90° ζ = 1,5…2,0; для прямоугольных тройников для разделения и объединения потоков ζ = 0,9…2,5; для плавных изгибов труб на угол 90° с радиусом изгиба, равным (3÷5)d ζ = 0,12…0,15; для входа в трубу ζ = 0,5; для выхода из трубы в бак или в цилиндр ζ = 1.
При ламинарном режиме Т.М. Башта [3, с.29] для определения коэффициента гидравлического трения λ рекомендует при Re<2300 применять формулу

а при турбулентном режиме течения жидкости в диапазоне Re = 2 300…100 000 коэффициент λ определяется по полуэмпирической формуле Блазиуса

Если

где ΔЭ - эквивалентная шероховатость труб (для новых бесшовных стальных труб ΔЭ = 0,05 мм, для латунных - ΔЭ = 0,02 мм, для медных - 0,01, для труб из сплавов из алюминия - 0,06, для резиновых шлангов - 0,03), то коэффициент гидравлического трения определяется по формуле А.Д. Альтшуля
Потери давления в гидроаппаратуре ΔPга принимают по ее технической характеристике после выбора гидроаппаратуры. После этого суммируют потери давления
ΔP=ΔPдл+ΔPм+ΔP га
При выполнении гидравлического расчета производят проверку бескавитационной работы насоса. Вакуум у входа в насос определяют по формуле
где hs - расстояние от оси насоса до уровня рабочей жидкости в баке; hтр - потери напора на преодоление всех гидравлических сопротивлений во всасывающей гидролинии; υ - скорость движения жидкости во всасывающей гидролинии; α - коэффициент Кориолиса.
Рекомендуемый (с запасом на бескавитационную работу насоса) вакуум Pв у входа в насос должен быть не более 0,04 МПа. Если Pв > 0,04 МПа, то нужно увеличить диаметр всасывающего трубопровода или расположить бак выше оси насоса. При этом считается, что рабочая жидкость находится в баке с атмосферным давлением Pатм = 0,1 МПа. Таким образом, разность давлений в баке Pб (с атмосферным или избыточным давлением) и на входе в насос Pв не должна быть меньше 0,06 МПа.
Определение толщины стенок является проверочным расчетом на прочность жестких труб, подобранных по ГОСТу. Толщину стенки трубы определяют по формуле

где P - максимальное статическое давление;
σв - допускаемое напряжение на разрыв материала труб, принимаемое равным 30…35% от временного сопротивления;
n - коэффициент запаса, n = 3…6, для гнутых труб принимается равным на 25 % ниже.
С учетом возможных механических повреждений толщина стенок стальных труб должна быть не менее 0,5 мм, а для медных - не менее 0,8…1,0 мм.
3. Насосы и гидромоторы
3.1. Некоторые термины и определения
Насос - гидравлическая машина, в которой механическая энергия, приложенная к выходному валу, преобразуется в гидравлическую энергию потока рабочей жидкости.
Гидродвигатель - машина, в которой энергия потока рабочей жидкости преобразуется в энергию движения выходного звена. Если выходное звено получает вращательное движение, то такой гидродвигатель называют гидромотором, если поступательное, то силовым цилиндром.
Гидромашина, которая может работать в режиме насоса или гидромотора, называется обратимой.
Рабочий объем гидромашины в насосе - это объем жидкости вытесняемый в систему за один оборот вала насоса; в гидромоторе - объем жидкости, необходимый для получения одного оборота вала гидромотора. Гидромашины изготавливаются с постоянным и переменным рабочим объемом. В соответствии с этим с постоянным рабочим объемом называются нерегулируемые, а с переменным - регулируемые.
Гидролиния (магистраль) - как уже говорилось в лекции 2, это трубопровод, по которому транспортируется рабочая жидкость. Различают магистрали всасывающие, напорные, сливные и дренажные.
Производительность насоса (подача) - это отношение объема подаваемой жидкости ко времени.
Теоретическая производительность насоса QТ - это расчетный объем жидкости, вытесняемый в единицу времени из его полости нагнетания.
Действительная производительность насоса QД уменьшается на величину QН из-за обратного течения жидкости в насосе из полости нагнетания в полость всасывания и из-за утечки жидкости во внешнюю среду. Поэтому
QД = QТ - QН,
а отношение

где ηоб.н. - объемный КПД насоса.
Объемные потери и объемный КПД гидромотора. При работе машины в режиме гидромотора в приемную его полость поступает жидкость под давлением от насоса. Объемные потери в гидромоторе сводятся в основном к утечкам жидкости через зазоры между сопрягаемыми элементами. Это приводит к тому, что подводимый объем жидкости QП превышает теоретическое значение QТ. Поэтому

где ΔQМ - величина утечек в гидромоторе (объемные потери).
Мощность и крутящий момент на валу гидромотора. Фактическая мощность развиваемая гидромотором при данном перепаде давлений
NM факт = ΔPqMnMηM
где qм - рабочий объем гидромотора;
nм - частота вращения гидромотора;
ηм - общий КПД гидромотора.
Выразив крутящий момент через теоретическую мощность NТ = ΔPqn и угловую скорость ω= 2πn, получим теоретическую величину крутящего момента для гидромашины:

3.2. Гидравлические машины шестеренного типа
Шестеренные машины в современной технике нашли широкое применение. Их основным преимуществом является конструкционная простота, компактность, надежность в работе и сравнительно высокий КПД. В этих машинах отсутствуют рабочие органы, подверженные действию центробежной силы, что позволяет эксплуатировать их при частоте вращения до 20 с-1. В машиностроении шестеренные гидромашины применятся в системах с дроссельным регулированием.
Шестеренные насосы. Основная группа шестеренных насосов состоит из двух прямозубых шестерен внешнего зацепления (рис.3.1, а). Применяются также и другие конструктивные схемы, например, насосы с внутренним зацеплением (рис.3.1, б), трех- и более шестерные насосы (рис.3.1, в).
Рис.3.1. Схемы шестеренных насосов:
а - с внешним зацеплением; б - с внутренним зацеплением; в - трехшестеренный
Шестеренный насос с внешним зацеплением (рис.3.1, а) состоит из ведущей 1 и ведомой 2 шестерен, размещенных с небольшим зазором в корпусе 3. При вращении шестерен жидкость, заполнившая рабочие камеры (межзубовые пространства), переносится из полости всасывания 4 в полость нагнетания 5. Из полости нагнетания жидкость вытесняется в напорный трубопровод.
В общем случае подача шестерного насоса определяется по формуле
где k - коэффициент, для некорригированных зубьев k = 7, для корригированных зубьев k = 9,4; D - диаметр начальной окружности шестерни; z - число зубьев; b - ширина шестерен; n - частота оборотов ведущего вала насоса; ηоб - объемный КПД.
Шестеренный насос в разобранном состоянии представлен на рис.3.2. Шестеренный насос состоит из корпуса 8, выполненного из алюминиевого сплава, внутри которого установлены подшипниковый блок 2 с ведущей 1 и ведомой 3 шестернями и уплотняющий блок 5, представляющий собой другую половину подшипника. Для радиального уплотнения шестерен в центральной части уплотняющего блока имеются две сегментные поверхности, охватывающие с установленным зазором зубья шестерен. Для торцевого уплотнения шестерен служат две поджимные пластины 7, устанавливаемые в специальные пазы уплотняющего блока с обеих сторон шестерен. В поджимных пластинах и в левой части уплотняющего блока есть фигурные углубления под резиновые прокладки 6. Давлением жидкости из полости нагнетания пластины 7 прижимаются к торцам шестерен, благодаря чему автоматически компенсируется зазор, а утечки остаются практически одинаковыми при любом рабочем давлении насоса. Ведущая и ведомая шестерни выполнены заодно с цапфами, опирающимися на подшипники скольжения подшипникового и уплотняющего блоков. Одна из цапф ведущей шестерни имеет шлицы для соединения с валом приводящего двигателя. Насос закрывается крышкой 4 с уплотнительным резиновым кольцом 9. Приводной вал насоса уплотнен резиновой манжетой, закрепленной специальными кольцами в корпусе насоса.
Рис.3.2. Шестеренный насос НШ-К и его составные элементы
Шестеренные насосы с внутренним зацеплением сложны в изготовлении, но дают более равномерную подачу и имеют меньшие размеры. Внутренняя шестерня 1 (см. рис.3.1, б) имеет на два-три зуба меньше, чем внешняя шестерня 2. Между внутренней и внешней шестернями имеется серпообразная перемычка 3, отделяющая полость всасывания от напорной полости. При вращении внутренней шестерни жидкость, заполняющая рабочие камеры, переносится в напорную полость и вытесняется через окна в крышках корпуса 4 в напорный трубопровод.
На рис.3.1, в приведена схема трехшестеренного насоса. В этом насосе шестерня 1 ведущая, а шестерни 2 и 3 - ведомые, полости 4 - всасывающие, а полости 5 - напорные. Такие насосы выгодно применять в гидроприводах, в которых необходимо иметь две независимые напорные гидролинии.
Равномерность подачи жидкости шестерным насосом зависит от числа зубьев шестерни и угла зацепления. Чем больше зубьев, тем меньше неравномерность подачи, однако при этом уменьшается производительность насоса. Для устранения защемления жидкости в зоне контакта зубьев шестерен в боковых стенках корпуса насоса выполнены разгрузочные канавки, через которые жидкость отводится в одну из полостей насоса.
Шестеренные гидромоторы. Работа шестеренных гидромоторов осуществляется следующим образом. Жидкость из гидромагистрали (см. рис.3.1, а) поступает в полость 4 гидродвигателя и, воздействуя на зубья шестерен, создает крутящий момент, равный

где ηм - механический КПД гидромотора.
Конструктивно шестерные гидромоторы отличаются от насосов меньшими зазорами в подшипниках, меньшими усилиями поджатия втулок к торцам шестерен, разгрузкой подшипников от неуравновешенных радиальных усилий. Пуск гидромоторов рекомендуется производить без нагрузки.
Шестеренные машины являются обратимыми, т.е. могут быть использованы и как гидромоторы и как насосы.
3.3. Пластинчатые насосы и гидромоторы
Пластинчатые насосы и гидромоторы так же, как и шестеренные, просты по конструкции, компактны, надежны в эксплуатации и сравнительно долговечны. В таких машинах рабочие камеры образованы поверхностями статора, ротора, торцевых распределительных дисков и двумя соседними вытеснителями-платинами. Эти пластины также называют лопастями, лопатками, шиберами.
Пластинчатые насосы могут быть одно-, двух- и многократного действия. В насосах однократного действия одному обороту вала соответствует одно всасывание и одно нагнетание, в насосах двукратного действия - два всасывания и два нагнетания.
Схема насоса однократного действия приведена на рис.3.3. Насос состоит из ротора 1, установленного на приводном валу 2, опоры которого размещены в корпусе насоса. В роторе имеются радиальные или расположенные под углом к радиусу пазы, в которые вставлены пластины 3. Статор 4 по отношению к ротору расположен с эксцентриситетом е. К торцам статора и ротора с малым зазором (0,02…0,03 мм) прилегают торцевые распределительные диски 5 с серповидными окнами. Окно 6 каналами в корпусе насоса соединено с гидролинией всасывания 7, а окно 8 - с напорной гидролинией 9. Между окнами имеются уплотнительные перемычки 10, обеспечивающие герметизацию зон всасывания и нагнетания. Центральный угол , образованный этими перемычками, больше угла между двумя соседними пластинами.
При вращении ротора пластины под действие м центробежной силы, пружин или под давлением жидкости, подводимой под их торцы, выдвигаются из пазов и прижимаются к внутренней поверхности статора. Благодаря эксцентриситету объем рабочих камер вначале увеличивается - происходит всасывание, а затем уменьшается - происходит нагнетание. Жидкость из линии всасывания через окна распределительных дисков вначале поступает в рабочие камеры, а затем через другие окна вытесняется из них в напорную линию.
При изменении эксцентриситета е изменяется подача насоса. Если е = 0 (ротор и статор расположены соосно), платины не будут совершать возвратно-поступательных движений, объем рабочих камер не будет изменяться, и, следовательно, подача насоса будет равна нулю. При перемене эксцентриситета с +е на -е изменяется направление потока рабочей жидкости (линия 7 становится нагнетательной, а линия 9 - всасывающей). Таким образом, пластинчатые насосы однократного действия в принципе регулируемые и реверсируемые.
Рис.3.3. Схема пластинчатого насоса однократного действия:
1 - ротор; 2 - приводной вал; 3 - пластины; 4 - статор;
5 - распределительный диск; 6, 8 - окна; 7 - гидролиния всасывания; 9 - гидролиния нагнетания
Подачу пластинчатого насоса однократного действия определяют по формуле

где b - ширина пластин; е - эксцентриситет; D - диаметр статора; z - число платин; t - толщина платин; n - частота вращения ротора.
Число пластин z может быть от 2 до 12. С увеличением числа пластин подача насоса уменьшается, но при этом увеличивается ее равномерность.
В насосах двойного действия (рис.3.4) ротор 1 и 2 статор соосны. Эти насосы имеют по две симметрично расположенные полости всасывания и полости нагнетания. Такое расположение зон уравновешивает силы, действующие со стороны рабочей жидкости, и разгружает приводной вал 2, который будет нагружен только крутящим моментом. Для большей уравновешенности число пластин 3 в насосах двойного действия принимается четным. Торцевые распределительные диски 5 имеют четыре окна. Два окна 6 каналами в корпусе насоса соединяются с гидролинией всасывания 7, другие два 8 - с напорной гидролинией 9. Так же как и в насосах однократного действия, между окнами имеются уплотнительные перемычки 10. Для герметизации зон всасывания и нагнетания должно быть соблюдено условие, при котором ε < β.
Профиль внутренней поверхности статора выполнен из дуг радиусами R1 и R2 с центром в точке О. Пазы для пластин в роторе могут иметь радиальное расположение под углом 7…15 к радиусу, что уменьшает трение и исключает заклинивание пластин. Насосы с радиальным расположением пластин могут быть реверсивными.

a)
1, 7 - распределительные диски; 3 - статор; 4 - ротор; 5 - пластины;
6, 8 - окна напорной полости; 2, 12 - окна всасывающей полости; 9 - штифт;
10 - внутренняя поверхность статора; 11 - отверстие
б)
1 - крышка; 2, 8 - подшипники; 3, 7 - диски; 4 - окно; 5 - статор;
6 - ротор; 9 - фланец; 10 - манжеты; 11 - вал приводной; 12 - пружина;
13 - камера под давлением; 14 - окно всасывания; 15 - корпус; 16 - пластины;
17 - отверстие; 18 - штифт; 19 - окно
Рис.3.5. Рабочий комплект (а) и конструкция (б) пластинчатого насоса двойного действия Г12-2М
Рассмотрим еще раз устройство и принцип работы пластинчатого насоса двойного действия на примере насоса Г12-2М. Основными деталями насоса является корпус с крышкой, приводной вал с подшипниками и рабочий комплект (рис.3.5, а), состоящий из распределительных дисков 1 и 7, статора 3, ротора 4 и пластин 5. Диски и статор, зафиксированные в угловом положении относительно корпуса штифтом 9, прижимаются друг к другу пружинами (не показаны), а также давлением масла в напорной линии. При вращении ротора 4, связанного через шлицевое соединение с приводным валом, в направлении, указанном стрелкой, пластины 5 центробежной силой и давлением масла, подведенного в отверстия 11, прижимаются к внутренней поверхности 10 статора 3, имеющей форму овала, и, следовательно, совершают возвратно-поступательное движение в пазах ротора.
Во время движения пластин от точки А до точки В и от точки С до точки D объемы камер, образованных двумя соседними пластинами, внутренней поверхностью статора, наружной поверхностью ротора и торцевыми поверхностями дисков 1 и 7, увеличиваются, и масло заполняет рабочие камеры через окна 2 и 12 диска 1, связанные со всасывающей линией. При движении в пределах участков ВС и DА объемы камер уменьшаются, и масло вытесняется в напорную линию гидросистемы через окна 6 и 8 диска 7. Поскольку зоны нагнетания (ВС и DА) и всасывания (АВ и CD) расположены диаметрально относительно ротора, на него не действуют радиальные усилия, что положительно сказывается на долговечности подшипников приводного вала.
Конструкция насоса показана на рис.3.5, б. В расточках корпуса 15 и крышки 1 установлен рабочий комплект (диски 3 и 7, статор 5, ротор 6, пластины 16). Ротор через шлицевое соединение связан с приводным валом 11, опирающимся на шарикоподшипники 2 и 8. Наружные утечки или подсос воздуха по валу исключается манжетами 10, установленными в расточке фланца 9. Комплект сжимается тремя пружинами 12 и давлением масла в камере 13. Окна 4 диска 3 через отверстия 17 статора соединены с глухими окнами всасывания 14 диска 7, благодаря чему масло из всасывающей линии поступает в ротор с двух сторон, что облегчает условия всасывания. В напорную линию масло вытесняется через окна 19 диска 7. Поворот комплекта предотвращается штифтом 18 (или винтами), проходящими через отверстия в деталях 1, 3, 5, 7 и 15.
Подачу пластинчатого насоса двойного действия определяют по формуле

где b - ширина ротора; R1 и R2 - радиусы дуг, образующих профиль внутренней поверхности статора; t - толщина платин; z - число пластин; α - угол наклона пластин к радиусу.
Пластинчатые гидромоторы могут быть также одно-, двух- и многократного действия. Пластинчатые гидромоторы от пластинчатых насосов отличаются тем, что в их конструкцию включены устройства, обеспечивающие постоянный прижим пластин к статорному кольцу.
При подводе к машине жидкости на рабочую поверхность пластин действует сила, создающая крутящий момент на валу гидромотора, который для гидромоторов однократного действия определяется по формуле:

а для гидромоторов двойного действия

Гидромоторы двойного действия так же, как и насосы двойного действия, нерегулируемые.
Надежность и срок службы пластинчатых гидромашин зависят от материала пластин и статорного кольца. Во избежание отпуска материала пластин из-за нагрева от рения о статорное кольцо пластины изготовляют из стали с высокой температурой отпуска. Статорное кольцо цементируется и закаливается. Ротор изготовляют из закаленной хромистой стали, а торцевые распределительные диски из бронзы.
3.4. Радиально-поршневые насосы и гидромоторы
Радиально-поршневые гидромашины применяют при сравнительно высоких давлениях (10 МПа и выше). По принципу действия радиально-поршневые гидромашины делятся на одно-, двух- и многократного действия. В машинах однократного действия за один оборот ротора поршни совершают одно возвратно-поступательное движение.
Схема радиально-поршневого насоса однократного действия приведена на рис.3.6. Рабочими камерами в насосе являются радиально расположенные цилиндры, а вытеснителями - поршни. Ротор (блок цилиндров) 1 на скользящей посадке установлен на ось 2, которая имеет два канала 3 и 4 (один соединен с гидролинией всасывания, другой - с напорной гидролинией). Каналы имеют окна 5, которыми они могут соединяться с цилиндрами 6. Статор 7 по отношению к ротору располагается с эксцентриситетом.
Рис.3.6. Схема радиально-поршневого насоса однократного действия
Ротор вращается от приводного вала через муфту 8. При вращении ротора в направлении, указанном на рис.3.6. стрелкой, поршни 9 вначале выдвигаются из цилиндров (происходит всасывание), а затем вдвигаются (нагнетание). Соответственно рабочая жидкость вначале заполняет цилиндры, а затем поршнями вытесняется оттуда в канал 4 и далее в напорную линию гидросистемы. Поршни выдвигаются и прижимаются к статору центробежной силой или принудительно (пружиной, давлением рабочей жидкости или иным путем).
Подача радиально-поршневого насоса

где d - диаметр цилиндра; е - эксцентриситет; z - число поршней.
В серийных конструкциях радиально-поршневых насосов число поршней принимается нечетным (чаще всего z = 7 или z = 9). Число рядов цилиндров для увеличения подачи может быть увеличено от 2 до 6. Подача радиально-поршневого насоса с кратностью действия i и числом рядов m подсчитывается по формуле
где h - ход поршней.
В станкостроении применяют регулируемые радиально-поршневые насосы однократного действия типа НП, которые выпускают с максимальной подачей до 400 л/мин и давлением до 200 МПа.
На рис.3.7. представлен радиально-поршневой насос однократного действия типа НП с четырьмя рядами цилиндров, который состоит из корпуса 1 и крышки 25, внутри которых размещены все рабочие элементы насоса: скользящий блок 10 с крышкой 24, обойма 9 с крышкой 3 и реактивным кольцом 6, ротор 8 с радиально расположенными цилиндрами, поршни 7, распределительная ось 11, на которой на скользящей насадке установлены ротор, приводной вал 20 и муфта. Скользящий блок может перемещаться по направляющим 15, благодаря чему достигаются изменение эксцентриситета, а следовательно, и подача насоса. Величина эксцентриситета ограничивается указателем 19. Обойма вращается в двух подшипниках 12, а приводной вал - в подшипниках 14. Распределительная ось имеет каналы с отверстиями, через которые происходят всасывание и нагнетание. Муфта состоит из фланца 2, установленного на шлицах приводного вала промежуточного кольца 5 и четырех роликов 4, через которые крутящий момент предается от фланца к ротору. Для исключения утечек рабочей жидкости по валу служит уплотнение 21. Утечки по каналу 17 отводятся в корпус насоса, а из него через отверстие 13 в дренажную гидролинию.

Рис.3.7. Радиально-поршневой насос однократного действия типа НП
Насос работает следующим образом. При вращении ротора поршни под действием центробежной силы выдвигаются из цилиндров и прижимаются к реактивным кольцам обоймы. При этом если между ротором и обоймой есть эксцентриситет, то поршни, кроме вращательного, будут совершать и возвратно-поступательные (в радиальном направлении) движения. Изменение эксцентриситета вызывает соответствующее изменение хода поршней и подачи насоса. Вместе с ротором во вращение вовлекается обойма, вращающаяся в своих подшипниках. Такая конструкция позволяет уменьшить силы трения и повысить КПД гидромашины.
Для радиально-поршневых машин работающих в режиме гидромотора крутящий момент можно определить по формуле

где m - число рядов цилиндров;
i - кратность хода поршней;
h - величина хода поршней.
3.5. Аксиально-поршневые насосы и гидромоторы
Аксиально-поршневые гидромашины нашли широкое применение в гидроприводах, что объясняется рядом их преимуществ: меньшие радиальные размеры, масса, габарит и момент инерции вращающихся масс; возможность работы при большом числе оборотов; удобство монтажа и ремонта.
Аксиально-поршневой насос состоит из блока цилиндров 8 (рис.3.8) с поршнями (плунжерами) 4, шатунов 7, упорного диска 5, распределительного устройства 2 и ведущего вала 6.

Рис.3.8. Принципиальные схемы аксиально-поршневых насосов:
1 и 3 - окна; 2 - распределительное устройство; 4 - поршни;
5 - упорный диск; 6 - ведущий вал; 7 - шатуны; 8 - блок цилиндров
а - с иловым карданом; б - с несиловым карданом;
в - с точечным касанием поршней; г - бескарданного типа
Во время работы насоса при вращении вала приходит во вращение и блок цилиндров. При наклонном расположении упорного диска (см. рис.3.8, а, в) или блока цилиндров (см. рис.3.8, б, г) поршни, кроме вращательного, совершают и возвратно-поступательные аксиальные движения (вдоль оси вращения блока цилиндров). Когда поршни выдвигаются из цилиндров, происходит всасывание, а когда вдвигаются - нагнетание. Через окна 1 и 3 в распределительном устройстве 2 цилиндры попеременно соединяются то с всасывающей, то с напорной гидролиниями. Для исключения соединения всасывающей линии с напорной блок цилиндров плотно прижат к распределительному устройству, а между окнами этого устройства есть уплотнительные перемычки, ширина которых b больше диаметра dк отверстия соединительных каналов в блоке цилиндров. Для уменьшения гидравлического удара при переходе цилиндрами уплотнительных перемычек в последних сделаны дроссельные канавки в виде небольших усиков, за счет которых давление жидкости в цилиндрах повышается равномерно.
Рабочими камерами аксиально-поршневых насосов являются цилиндры, аксиально расположенные относительно оси ротора, а вытеснителями - поршни. По виду передачи движения вытеснителям аксиально-поршневые насосы подразделяются на насосы с наклонным блоком (см. рис.3.8, б, г) и с наклонным диском (см. рис.3.8, а, в). Известные конструкции аксиально-поршневых насосов выполнены по четырем различным принципиальным схемам.
Насосы с силовым карданом (см. рис.3.8, а) приводной вал соединен с наклонным диском силовым карданом, выполненным в виде универсального шарнира с двумя степенями свободы. Поршни соединяются с диском шатунами. При такой схеме крутящий момент от приводящего двигателя передается блоку цилиндров через кардан и наклонный диск. Начальное прижатие блока цилиндров распределительному устройству обеспечивается пружиной, а во время работы насоса давлением жидкости. Передача крутящего момента блоку цилиндров необходима для преодоления сил трения между торцом блока цилиндров и распределительным устройством.
В насосах с двойным несиловым карданом (см. рис.3.8, б) углы между осью промежуточного вала и осями ведущего и ведомого валов принимают одинаковыми и равными 1 = 2 = /2. При такой схеме вращение ведущего и ведомого валов будет практически синхронным, а кардан полностью разгруженным, так как крутящий момент от приводящего двигателя передается блоку цилиндров через диск 5, изготавливаемый заодно с валом 6.
Насосы с точечным касанием поршней наклонного диска (см. рис.3.8, в) имеют наиболее простую конструкцию, поскольку здесь нет шатунов и карданных валов. Однако для того, чтобы машина работала в режиме насоса, необходимо принудительно выдвижение поршней из цилиндров для прижатия их к опорной поверхности наклонного диска (например, пружинами, помещенными в цилиндрах). По такой схеме чаще всего изготовляют гидромоторы типа Г15-2 (рис.3.9). Эти машины выпускаются небольшой мощности, т.к. в местах контакта поршней с диском создается высокое напряжение, которое ограничивает давление жидкости.
Рис.3.9. Аксиально-поршневой гидромотор типа Г15-2:
1 - вал; 2 - манжета; 3 - крышка; 4, 9 - корпус; 5, 16 - подшипник;
6 - радиально упорный подшипник; 7 - барабан; 8 - поводок; 10 - ротор;
11 - пружины; 12 - дренажное отверстие; 13 - распределительное устройство;
14 - полукольцевые пазы; 15 - отверстие напорное; 17 - поршни; 18 - шпонка; 19 - толкатель
Аксиально-поршневые машины бескарданного типа (см. рис.3.8, г) блок цилиндров соединяется с ведущим валом через шайбу и шатуны поршней. По сравнению с гидромашинами с карданной связью машины бескарданного типа проще в изготовлении, надежнее в эксплуатации, имеют меньший габарит блока цилиндров. По данной схеме отечественной промышленностью выпускается большинство аксиально-поршневых машин серии 200 и 300 (рис.3.10).
Рис.3.9. Аксиально-поршневой гидромотор типа Г15-2:
1 - вал; 2 - манжета; 3 - крышка; 4, 9 - корпус; 5, 16 - подшипник;
6 - радиально упорный подшипник; 7 - барабан; 8 - поводок; 10 - ротор;
11 - пружины; 12 - дренажное отверстие; 13 - распределительное устройство;
14 - полукольцевые пазы; 15 - отверстие напорное; 17 - поршни; 18 - шпонка; 19 - толкатель
Структура условного обозначения аксиально-поршневых машин серий 200 и 300 приведена на рис.3.11.
Подача (расход) аксиально-поршневой гидромашины зависит от хода поршня, который определяется углом γ наклона диска или блока цилиндров ( γ < 25 ). Если конструкция гидромашины в процессе ее эксплуатации допускает изменение угла γ, то такие машины регулируемые. При изменении угла наклона шайбы или блока цилиндров с + γ до - γ достигается реверсирование направления потока жидкости или вращения ротора гидромашины.
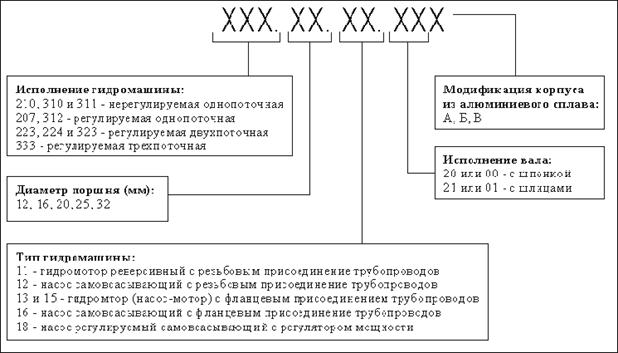
Рис.3.11. Структура условного обозначения
аксиально-поршневых гидромашин серий 200 и 300
Подачу для машин с бесшатунным приводом определяют по формуле:

а для машин с шатунным приводом

где d - диаметр цилиндра; D и D - диаметр окружности, на которой расположены центры окружностей цилиндров или закреплены шатуны на диске; D tg γ и D' sin γ - ход поршня при повороте блока цилиндров на 180 ; z - число поршней (z = 7, 9, 11).
Крутящий момент аксиально-поршневого гидромотора определяют по формуле:

4. Гидроцилиндры
В качестве исполнительных механизмов (гидродвигателей) применяются силовые цилиндры, служащие для осуществления возвратно-поступательных прямолинейных и поворотных перемещений исполнительных механизмов. Гидроцилиндры подразделяются на поршневые, плунжерные мембранные и сильфонные.
4.1. Механизмы с гибкими разделителями
К механизмам с гибкими разделителями относятся мембраны, мембранные гидроцилиндры и сильфоны.
Мембраны (рис.4.1, а) применяют в основном при небольших перемещениях и небольших давлениях (до 1 МПа). Мембранный исполнительный механизм представляет собой защемленное по периферии корпуса эластичное кольцо 1. При увеличении давления в подводящей камере 2 эластичное кольцо прижимается к верхней части корпуса 3, и шток 4, связанный с эластичным кольцом выдвигается. Обратный ход штока обеспечивает пружина 5.

Рис.4.1. Схемы мембран:
а - плоская с эластичным кольцом; б - гофрированная металлическая
В гидропневмоавтоматике распространены также гофрированные металлические мембраны (рис.4.1, б). Деформация таких мембран происходит за счет разности давлений ΔP = P1 - P2 и внешней нагрузки R.
Мембранные гидроцилиндры (рис.4.2) допускают значительны перемещения выходного звена - штока. При перемещении поршня 1 в направлении действия давления жидкости (рис.4.2, а) мембрана 3 перегибается, перекатываясь со стенок поршня 1 на стенки цилиндра 2, к которым она плотно поджимается давлением жидкости (рис.4.2, б). Обратный ход поршня происходит за счет пружины.

Рис.4.2. Схемы работы мембранного гидроцилиндра
Сильфоны (рис.4.3, а) предназначены для работы при небольших давлениях (до 3 МПа). Их изготавливают из металлов и неметаллических материалов (резины или пластиков). Металлические сильфоны бывают одно- и многослойные (до пяти слоев). Применение сильфонов оправдано в условиях высоких и низких температур, значение которых лимитируется материалом, из которого изготовлен сильфон. Сильфоны могут быть цельные или сварные. Цельные изготавливают развальцовкой тонкостенной бесшовной трубы.

Рис.4.3. Схема металлического сильфона
а - сильфон; б - цельная стенка; в - сварная стенка
4.2. Классификация гидроцилиндров
Гидроцилиндры являются объемными гидромашинами и предназначены для преобразования энергии потока рабочей жидкости механическую энергию выходного звена. Гидроцилиндры работают при высоких давлениях (до 32 МПа), их изготовляют одностороннего и двухстороннего действия, с односторонним и двухсторонним штоком и телескопические.
Таблица 4.1
Классификация гидроцилиндров

4.3. Гидроцилиндры прямолинейного действия
Для привода рабочих органов мобильных машин наиболее широко применяют поршневые гидроцилиндры двухстороннего действия с односторонним штоком (рис.4.4).
Основой конструкции является гильза 2, представляющая собой трубу с тщательно обработанной внутренней поверхностью. Внутри гильзы перемещается поршень 6, имеющий резиновые манжетные уплотнения 5, которые предотвращают перетекание жидкости из полостей цилиндра, разделенных поршнем. Усилие от поршня передает шток 3, имеющий полированную поверхность. Для его направления служит грундбукса 8. С двух сторон гильзы укреплены крышки с отверстиями для подвода и отвода рабочей жидкости. Уплотнение между штоком и крышкой состоит из двух манжет, одна из которых предотвращает утечки жидкости из цилиндра, а другая служит грязесъемником 1. Проушина 7 служит для подвижного закрепления гидроцилиндра. На нарезанную часть штока крепится проушина или деталь, соединяющая гидроцилиндр с подвижным механизмом.

Рис.4.4. Гидроцилиндр:
1 - грязесъемник; 2 - гильза; 3 - шток; 4 - стопорное кольцо; 5 - манжета;
6 - поршень; 7 - проушина; 8 - грундбукса
У нормализованных цилиндров, применяющихся в строительных машинах, диаметр штока составляет в среднем 0,5 D, ход поршня не превосходит 10D. При большей величине хода и давлениях, превышающих 20 МПа, шток следует проверять на устойчивость от действия продольной силы.
Для уменьшения потерь давления диаметры проходных отверстий в крышках цилиндра для подвода рабочей жидкости назначают из расчета, чтобы скорость жидкости составляла в среднем 5 м/с, но не выше 8 м/с.
Ход поршня ограничивается крышками цилиндра. В некоторых случая она достигает 0,5 м/с. Жесткий удар поршня о крышку в гидроцилиндрах строительных машин предотвращают демпферы (тормозные устройства). Принцип из действия большинства из них основан на запирании небольшого объема жидкости и преобразования энергии движущихся масс в механическую энергию жидкости. Из запертого объема жидкость вытесняется через каналы малого сечения.
На рис.4.5. представлены типичные схемы демпферных устройств. Пружинный демпфер (рис.4.5, а) представляет собой пружину 1, установленную на внутренней стороне крышки цилиндра 2, тормозящую поршень 3 в конце хода.
Демпфер с ложным штоком (рис.4.5, б) представляет собой короткий ложный шток 1 и выточку 2 в крышке цилиндра. Ложный шток может иметь коническую или цилиндрическую форму. В конце хода поршня жидкость запирается ложным штоком в выточке крышки цилиндра и вытесняется оттуда через узкую кольцевую щель. Если ложный шток выполнен в виде конуса, то эта щель уменьшается по мере достижения поршнем конца своего хода. При этом сопротивление движению жидкости возрастает, а инерция, ускорение и скорость движения поршня уменьшаются.
Регулируемый демпфер с отверстием (рис.4.5, в) по принципу действия аналогичен демпферу с ложным штоком. Конструктивное отличие заключается в том, что запираемая в выточке крышки цилиндра жидкость вытесняется через канал 1 малого сечения, в котором установлена игла 2 для регулирования проходного сечения отверстия.
Гидравлический демпфер (рис.4.5, г) применяется в том случае, когда конструкцией гидроцилиндра не может быть предусмотрено устройство выточки. В гидравлическом демпфере в конце хода поршня стакан 1 упирается в крышку цилиндра, а жидкость вытесняется из полости 2 через кольцевой зазор между стаканом 1 и поршнем 3. Пружина 4 возвращает стакан в исходное положение при холостом ходе поршня.

Рис.4.5. Принципиальные схемы демпферов:
а - пружинный демпфер; б - демпфер с ложным штоком;
в - демпфер регулируемый с отверстием; г - гидравлический демпфер
4.4. Расчет гидроцилиндров
Основными параметрами поршневого гидроцилиндра являются: диаметры поршня D и штока d, рабочее давление P, и ход поршня S.
Рассмотрим поршневой гидроцилиндр с односторонним штоком (рис.4.6). По основным параметрам можно определить следующие зависимости:
площадь поршня в поршневой полости 1 и в штоковой полости 2 соответственно

усилие, развиваемое штоком гидроцилиндра при его выдвижении и втягивании соответственно

где kтр = 0,9…0,98 - коэффициент, учитывающий потери на трение;
скорости перемещения поршня

Рис.4.6. Основные и расчетные параметры гидроцилиндра
Расчеты на прочность. Прочностными расчетами определяют толщину стенок цилиндра, толщину крышек (головок) цилиндра, диаметр штока, диаметр шпилек или болтов для крепления крышек.
В зависимости от соотношения наружного DН и внутреннего D диаметров цилиндры подразделяют на толстостенные и тонкостенные. Толстостенными называют цилиндры, у которых DН / D > 1,2, а тонкостенными - цилиндры, у которых DН / D  1,2.
1,2.
Толщину стенки однослойного толстостенного цилиндра определяют по формуле:

где Pу - условное давление, равное (1,2…1,3)P ; [σ] - допускаемое напряжение на растяжение, Па (для чугуна 2,5 107, для высокопрочного чугуна 4 107, для стального литья (8…10) 107, для легированной стали (15…18) 107, для бронзы 4,2 10 7); μ - коэффициент поперечной деформации (коэффициент Пуассона), равный для чугуна 0, для стали 0,29; для алюминиевых сплавов 0,26…0,33; для латуни 0,35.
Толщину стенки тонкостенного цилиндра определяют по формуле:

К определенной по формулам толщине стенки цилиндра прибавляется припуск на обработку материала. Для D = 30…180 мм припуск принимают равным 0,5…1 мм.
Толщину крышки цилиндра определяют по формуле:
где dк - диаметр крышки.
Диаметр штока, работающего на растяжение и сжатие соответственно

где [σр] и [σ с] - допускаемы напряжения на растяжение и сжатие штока;
Штоки, длина которых больше 10 диаметров ("длинные" штоки), работающие на сжатие, рассчитывают на продольный изгиб по формуле Эйлера

где σкр - критическое напряжение при продольном изгибе; f - площадь поперечного сечения штока;
Диаметр болтов для крепления крышек цилиндров

где n - число болтов.
4.5. Поворотные гидроцилиндры
Для возвратно-поворотных движений приводимых узлов на угол, меньший 360 , применяют поворотные гидроцилиндры (рис.4.7.), которые представляют собой объемный гидродвигатель с возвратно-поворотным движением выходного звена.

Рис.4.7. Поворотный однолопастной гидроцилиндр:
а - схема; б - общий вид
Поворотный гидроцилиндр состоит из корпуса 1, и поворотного ротора, представляющего собой втулку 2, несущую пластину (лопасть) 3. Кольцевая полость между внутренней поверхностью цилиндра и ротором разделена уплотнительной перемычкой 4 с пружинящим поджимом к ротору уплотнительного элемента 5.
При подводе жидкости под давлением Pр в верхний канал (см. рис.4.7, а) пластина 3 с втулкой 2 будет поворачиваться по часовой стрелке. Угол поворота вала цилиндра с одной рабочей пластиной обычно не превышает 270…280 .
Расчетный крутящий момент М на валу рассматриваемого гидроцилиндра с одной пластиной равен произведению силы R на плечо а приложения этой силы (расстояние от оси вращения до центра давления рабочей площади пластины)
M = Ra
Усилие R определяется произведением действующего на лопасть перепада давлений на рабочую площадь пластины F
R = ΔPF = ( Pр - Pсл ) F
Из рис.4.7, а видно, что рабочая площадь пластины

где b - ширина пластины.
Плечо приложения силы
В соответствии с этим расчетный крутящий момент

Угловая скорость ω вращения вала

Фактические момент MФ и угловая скорость ф будут меньше расчетных в связи с наличием потерь трения и утечек жидкости, характеризуемых механическим м и объемным об КПД гидроцилиндра:

Применяются также и многопластинчатые поворотные гидроцилиндры (рис.4.8), которые позволяют увеличить крутящий момент, однако угол поворота при этом уменьшится. Момент и угловая скорость многопластинчатого гидроцилиндра:
где z - число пластин.
Рис.4.8. Поворотные гидроцилиндры:
а - двухлопастной; б - трехлопастной
Для преобразования прямолинейного движения выходного звена гидроцилиндра 1 в поворотное исполнительного механизма 2 применяют речно-шестеренные механизмы (рис.4.9). Без учета сил трения крутящий момент на валу исполнительного механизма равен
а угловая скорость вращения

где DЗ - диаметр делительной окружности шестерни.

Рис.4.9. Речно-шестеренный механизм 4.10. Условное обозначение
поворотного гидроцилиндра
5. Гидрораспределители
5.1. Общие сведения
При эксплуатации гидросистем возникает необходимость изменения направления потока рабочей жидкости на отдельных ее участках с целью изменения направления движения исполнительных механизмов машины, требуется обеспечивать нужную последовательность включения в работу этих механизмов, производить разгрузку насоса и гидросистемы от давления и т.п.
Эти и некоторые другие функции могут выполняться специальными гидроаппаратами - направляющими гидрораспре- делителями.
При изготовлении гидрораспределителей в качестве конструктивных материалов применяют стальное литье, модифицированный чугун, высоко- и низкоуглеродистые марки сталей, бронзу. Для защиты отдельных элементов распределителей от абразивного износа, поверхности скольжения цементируют, азотируют и т.п.
Размеры и масса гидрораспределителей зависят от расхода жидкости через них, с увеличением которого они увеличиваются.
По способу присоединения к гидросистеме гидрораспре-делители выпускают в трех исполнениях: резьбового, фланцевого и стыкового присоединения. Выбор способа присоединения зависит от назначения гидрораспределителя и расхода через него рабочей жидкости.
По конструкции запорно-регулирующего элемента гидрораспределители подразделяются следующим образом:
Золотниковые (запорно-регулирующим элементом является золотник цилиндрической или плоской формы). В золотниковых гидрораспределителях изменение направления потока рабочей жидкости осуществляется путем осевого смещения запорно-регулирующего элемента.
Крановые (запорно-регулирующим элементом служит кран). В этих гидрораспределителях изменение направления потока рабочей жидкости достигается поворотом пробки крана, имеющей плоскую, цилиндрическую, коническую или сферическую форму.
Клапанные (запорно-регулирующим элементом является клапан). В клапанных распределителях изменение направления потока рабочей жидкости осуществляется путем последовательного открытия и закрытия рабочих проходных сечений клапанами (шариковыми, тарельчатыми, конусными и т.д.) различной конструкции.
По числу фиксированных положений золотника гидрораспределители подразделяются: на двухпозиционные, трехпозиционные и многопозиционные.
По управлению гидрораспределители подразделяются на гидроаппараты с ручным, электромагнитным, гидравлическим или электрогидравлическим управлением. Крановые гидрораспределители используются чаще всего в качестве вспомогательных в золотниковых распределителях с гидравлическим управлением.
5.2. Золотниковые гидрораспределители
Запорно-регулирующим элементом золотниковых гидрораспределителей является цилиндрический золотник 1, который в зависимости от числа каналов (подводов) 3 в корпусе 2 может иметь один, два и более поясков (рис.5.1, а). На схемах гидрораспределители обозначают в виде подвижного элемента, на котором указываются линии связи, проходы и элементы управления. Рабочую позицию подвижного элемента изображают квадратом (прямоугольником), число позиций соответствует числу квадратов (рис.5.1, б).

Рис.5.1. Схема (а) и обозначение (б) гидрораспределителя
Рассмотрим принцип работы распределителя (рис.5.2). В первой (исходной) позиции все линии А, В , Р и Т, подходящие к распределителю разобщены, т.е. перекрыты (рис.5.2, а). При смещении золотника влево распределитель переходит во вторую позицию, в которой попарно соединены линии Р и А, В и Т (рис.5.2, б). При смещении золотника вправо - в третью, где соединяются линии Р и В, А и Т (рис.5.2, в). Такой распределитель часто называют реверсивным, так как он используется для остановки и изменения направления движения исполнительных органов.

Рис.5.2. Схема работы золотникового гидрораспределителя
В зависимости от числа подводов (линий, ходов) распределители могут быть двухходовые (двухлинейные); трехходовые (трехлинейные), четырех- и многоходовые. В соответствии с этим в обозначениях гидрораспределителей первая цифра говорит о числе подводов. Например, из обозначения гидрораспределителя "4/2" можно понять, что он имеет 4 подвода, т.е. он четырехходовой (четырехлинейный).
Вторая цифра в обозначении говорит о числе позиций. То же обозначение распределителя "4/2" говорит, что у него две позиции.
Примеры обозначения распределителей приведены на рис.5.3.

Рис.5.3. Примеры обозначения типов распределителей
Управление положением золотника распределителя может быть нескольких типов. Подробные способы управления представлены в табл.5.1.
Таблица 5.1
Виды управления распределителями

Устройство ручного гидрораспределителя 4/3 и его условного обозначения представлено на рис.5.4. Переключение позиций распределителя осуществляется рукояткой 1, которая при помощи серьги 2 шарнирно присоединяется к золотнику 10. С корпусом 6 рукоятка шарнирно соединена с ушком 11. Для фиксации каждого положения золотника служит шариковый фиксатор 9, помещенный в задней крышке 8. Утечки жидкости по золотнику со стороны передней крышки 3 исключаются манжетным уплотнением. Рабочая жидкость подводится к отверстию 5, а отводится через отверстие 4. Канал 7 дренажный, служит для отвода утечек.
На рис.5.5 изображен гидрораспределитель с электрогидравлическим управлением и его уловное обозначение. Он состоит из основного гидрораспределителя 2 с гидравлическим управлением и вспомогательного гидрораспределителя 1 с электромагнитным управлением. Основной гидрораспределитель управляет потоком рабочей жидкости гидросистемы, а вспомогательный регулирует поток управления. Такие гидрораспределители применяют в гидроприводах с дистанционным и автоматическим управлением при больших расходах и высоком давлении в гидросистеме, когда применение гидрораспределителей с электромагнитным управлением невозможно.

Рис.5.4. Гидрораспределитель с ручным управлением
Рис.5.5. Гидрораспределитель с электрогидравлическим управлением
В зависимости от числа золотников гидрораспределители подразделяют на распределители с одним и несколькими золотниками. В последнем случае распределители могту быть моноблочными или секционными. Секции распределителя соединяют между собой болтами. На рис.5.6 представлен моноблочный гидрораспределитель.
Рис.5.6. Общий вид (а) и продольный разрез (б) моноблочного
четырехзолотникового гидрораспределителя
Золотники гидрораспределителя могут выполняться в трех исполнениях (рис.5.7).
Золотники с положительным осевым перекрытием (рис.5.7, а) имеют ширину поясков b больше, чем ширину проточки c или диаметр рабочих окон в корпусе. При нейтральном положении золотника такого гидрорапределителя напорная гидролиния отделена от линий, соединяющих полости гидродвигателя и слива. Величина перекрытия П = (b - c) / 2 зависит от диаметра золотника: при d = 10…12 мм перекрытие принимают равным 1…2 мм; при d до 25 мм - 3…5 мм; при d до 50 мм - 6…8 мм. Золотники с положительным осевым перекрытием позволяют фиксировать положение исполнительного механизма. Недостатком является наличие у них зоны нечувствительности, определяемой величиной осевого перекрытия: в пределах этой зоны при перемещении золотника расход жидкости через гидрораспределитель равен нулю, а исполнительный механизм не движется, несмотря на подаваемый к золотнику сигнал управления.

Рис.5.7. Конструктивные исполнения золотников
Золотники с нулевым осевым перекрытием (рис.5.7, б) имеют ширину пояска b равную ширине проточки c или диаметру рабочих окон, а осевое перекрытие П = 0. Такие золотники не имеют зоны нечувствительности и наилучшим образом удовлетворяют требованиям следящих гидросистем. Однако изготовление таких золотников связано со значительными технологическими трудностями.
Золотники с отрицательным осевым перекрытием (рис.5.7, в), у которых b < c; при нейтральном положении их напорная гидролиния соединена со сливом и с обеими полостями гидродвигателя. При этом жидкость через зазоры непрерывно поступает на слив, а в обеих полостях гидродвигателя устанавливается одинаковое давление. В гидрораспределителях с таким золотником зона нечувствительности сводится к минимуму, но из-за слива рабочей жидкости часть мощности теряется. Кроме этого, гидросистема с таким золотником будет иметь меньшую жесткость, так как из-за перетекания жидкости через начальные зазоры в золотнике будет переходить смещение исполнительного механизма при изменении преодолеваемой нагрузки.
5.3. Крановые гидрораспределители
В крановых гидрораспределителях изменение направления потока рабочей жидкости достигается поворотом пробки, имеющей плоскую, цилиндрическую, сферическую или коническую форму.
На рис.5.8 показана схема включения распространенного кранового распределителя в систему управления силовым цилиндром. Пробка крана имеет два перпендикулярных, но не пересекающихся отверстия. Она может занимать два и больше угловых положения.
Рис.5.8. Схемы включения в гидросистему пробкового крана
Серийный двухпозиционный крановый гидрораспре-делитель Г71-3 (рис.5.9) с цилиндрической пробкой состоит из корпуса 3, фланца 5, крышки 1, пробки 2, уплотнения 4, ступицы 7, рукоятки 8 и шарикового фиксатора 6. В положении пробки крана, указанном на рисунке, жидкость через отверстие 17 поступает в камеру 16; из нее через канал 18 в пробке крана (показан пунктиром) - в камеру 12 и далее через отверстие 11 в корпусе к гидродвигателю или к другому управляемому объекту. Из другой полости гидродвигателя жидкость поступает в отверстие 9, далее в камеру 10 и через канал 13 в камеру, которая отверстием 15 в корпусе крана соединена со сливом. При повороте пробки крана по часовой стрелке на угол 45 происходит изменение направления потока рабочей жидкости.
Рис.5.9. Крановый гидрораспределитель и его условное обозначение
Герметичность кранового гидрораспределителя обеспечивается за счет притирки пробки к корпусу крана. Для кранов с цилиндрической пробкой зазор между пробкой и корпусом принимают равным 0,01…0,02 мм. В этих кранах вследствие износа пробки и корпуса зазор между ними, а следовательно, и утечка рабочей жидкости с течением времени увеличиваются, что является недостатком такого кранового распределителя. Такого недостатка нет в крановых гидрораспределителях с конической пробкой.
Крановые гидрораспределители чаще всего применяют в качестве вспомогательных в золотниковых гидрораспре- делителях с гидравлическим управлением.
5.4. Клапанные гидрораспределители
В гидросистемах некоторых машин применяют также клапанные распределители, которые просты в изготовлении и надежны в эксплуатации, а также могут обеспечить высокую герметичность.
Затвора клапанов приводят в действие ручными, механическими и электротехническими устройствами. Из ручных устройств наиболее распространены клапаны с качающимся рычагом, схема которого для питания одной полости гидродвигателя приведена на рис.5.10, а.

Рис.5.10. Клапанные распределители:
а, б - с качающимся рычагом; в - с кулачковым приводом;
г - с электромагнитным приводом
В клапанном распределителе (см.рис.5.10, а) в нейтральном (среднем) положении качающегося рычага 1 оба клапана 2 и 3 находятся в своих гнездах; в этом положении клапанов канал b гидродвигателя отсоединен как от канала a, связанного с насосом, так и от канала c, связанного с баком. При повороте рычага 1 вправо с гидродвигателем соединяется канал a насоса, при повороте влево - канал c бака.
Схема четырехходового клапанного распределителя представлена на рис.5.10, б. При повороте рукоятки 1 перемещается та или другая пары клапанов 2 или 3, обеспечивая подвод (отвод) жидкости к соответствующей полости силового цилиндра 4.
Распространены также клапаны с кулачковым приводом (рис.5.10, в). На валике 3 находятся четыре кулачка 2, соответствующим образом ориентированные один относительно другого. При повороте валика кулачки воздействуют на штоки соответствующего конусного затвора 1, обеспечивая подвод рабочей жидкости в полости илового цилиндра 5 и ее отвод. В положении, показанном на рассматриваемом рисунке, жидкость от канала, связанного с насосом, поступает через открытый (утопленный) затвор 4 в левую полость силового цилиндра 5 и удаляется в бак из правой полости цилиндра через клапан. Остальные два затвора находятся в своих седлах. При повороте валика вступают в действие эти затворы, обеспечивая подвод жидкости в правую полость цилиндра 5 и отвод ее из левой полости.
На рис.5.10, г представлена схема трехпозиционного клапанного распределителя прямого действия с двумя клапанами 1 и 4, управляемыми электромагнитами 2 и 3. При выключенных электромагнитах оба клапана прижаты пружинами к своим седлам. При этом магистраль нагнетания перекрыта, а полости гидродвигателя соединены со сливом.
При включении электромагнита 2 клапан 1, сжимая пружину, переместится в крайнее левое положение и прижмется к левому седлу. В этом положении одна из полостей потребителя соединится с напорной магистралью. При включенном электромагните 3 и выключенном электромагните 2 сработает клапан 4, соединив вторую полость потребителя с магистралью нагнетания.
6. Регулирующая и направляющая аппаратура
6.1. Общие сведения о гидроаппаратуре
Гидроаппаратом называется устройство, предназначенное для изменения или поддержания заданного постоянного давления или расхода рабочей жидкости, либо для изменения направления потока рабочей жидкости. Гидроаппаратура подразделяется на регулирующую и направляющую.
Регулирующая гидроаппаратура изменяет давление, расход и направление потока рабочей жидкости за счет частичного открытия рабочего проходного сечения.
Направляющая гидроаппаратура предназначена только для изменения направления потока рабочей жидкости путем полного открытия или закрытия рабочего проходного сечения.
Рабочее проходное сечение гидроаппаратов изменяется при изменении положения запорно-регулирующего элемента, входящего в их конструкцию.
По принципу действия запорно-регулирующего элемента:
- гидроклапаны;
- гидроаппаратура неклапанного действия (дроссели).
В зависимости от конструкции запорно-регулирующего элемента гидроаппараты подразделяют на:
- золотниковые;
- крановые;
- клапанные.
По внешнему воздействию на запорно-регулирующий элемент:
- регулируемые;
- настраиваемые.
Гидроклапаном называется гидроаппарат, в котором величина открытия рабочего проходного сечения изменяется от воздействия проходящего через него потока рабочей жидкости.
По характеру воздействия на запорно-регулирующий элемент гидроклапаны могут быть прямого и непрямого действия. В гидроклапанах прямого действия величина открытия рабочего проходного сечения изменяется в результате непосредственного воздействия потока рабочей жидкости на запорно-регулирующий элемент. В гидроклапанах непрямого действия поток сначала воздействует на вспомогательный запорно-регулирующий элемент, перемещение которого вызывает изменение положения основного запорно-регулирующего элемента.
Гидроаппаратом неклапанного действия называется гидроаппарат, в котором величина открытия рабочего проходного сечения не зависит от воздействия потока проходящей через него рабочей жидкости. Такие гидроаппараты иначе называют дросселями. С точки зрения положений гидравлики дроссель представляет собой активное гидравлическое сопротивление.
6.2. Напорные гидроклапаны
Напорные гидроклапаны предназначены для ограничения давления в подводимых к ним потоках рабочей жидкости. На рис.6.1 приведены принципиальные схемы напорных клапанов прямого действия с шариковым, конусным, плунжерным и тарельчатым запорно-регулирующими элементами.
Рис.6.1. Принципиальные схемы напорных клапанов с запорно-регулирующими элементами:
а - с шариковым; б - с конусным; в - с золотниковым; г - с тарельчатым
Клапан состоит из запорно-регулирующего элемента 1 (шарика, конуса и т.д.), пружины 2, натяжение которой можно изменять регулировочным винтом 3. Отверстие 5 корпуса 4 соединяется с линией высокого давления, а отверстие 6 - со сливной линией. Часть корпуса, с которой запорно-регулирующий элемент клапана приходит в соприкосновение, называется седлом (посадочным местом).
При установке клапана в гидросистему пружина 2 настраивается так, чтобы создаваемое ею давление было больше рабочего, тогда запорно-регулирующий элемент будет прижат к седлу, а линия слива будет отделена от линии высоко давления. При повышении давления в подводимом потоке сверх регламентированного запорно-регулирующий элемент клапана перемещается вверх, преодолевая усилие пружины, рабочее проходное сечение клапана открывается, и гидролиния высокого давления соединяется со сливной. Вся рабочая жидкость идет через клапан на слив. Как только давление в напорной гидролинии упадет, клапан закроется, и если причина, вызвавшая повышение давления не будет устранена, процесс повторится.
Возникает вибрация запорно-регулирующего элемента, сопровождаемая ударами о седло и колебаниями давления в системе. Вибрация и удары могут служить причиной износа и потери герметичности клапанов.
Для уменьшения силы удара и частоты колебаний клапана о седло применяют специальные гидравлические демпферы (рис.6.1, б, г). Устройство состоит из камеры 7, в которой перемещается плунжер 8. Камера заполнена жидкостью. С линией слива эта камера соединяется тонким калибровочным отверстием 9 диаметром 0,8…1 мм. При открывании клапана плунжер вытесняет жидкость из камеры демпфера. Создаваемое при этом гидравлическое сопротивление, пропорциональное скорости движения плунжера, уменьшает частоту колебаний, силу удара запорно- регулирующего элемента и частично устраняет его вибрацию.
Достоинство клапанов прямого действия - высокое быстродействие. Недостаток - увеличение размеров при повышении рабочего давления, а также нестабильность работы.
При конструировании напорных клапанов их габарит и массу можно уменьшить, если применить дифференциальные клапаны или клапаны непрямого действия.
Дифференциальный клапан (рис.6.2) состоит из плунжера 1, который имеет два пояска диаметрами D и d, на которые воздействует жидкость.

Рис.6.2. Принципиальная схема дифференциального клапана
Благодаря наличию поясков с разными диаметрами уменьшается активная площадь запорно-регулирующего элемента клапана, на которую воздействует жидкость, и он оказывается частично разгруженным. Это позволяет уменьшить размеры пружины и всего клапана в целом. Начальная сила натяжения пружины 2 определяется из уравнения

С уменьшением разности площадей поясков хотя и уменьшается усилие пружины, но одновременно уменьшается и соотношение действующих на запорно-регулирующий элемент клапана сил давления жидкости и сил трения этого элемента о корпус клапана. При определенных соотношениях D и d эти силы могут оказаться несоизмеримы между собой и клапан перестанет работать. Поэтому в реальных конструкциях дифференциальных клапанов принимают следующее соотношение:

Недостатком дифференциальных клапанов является скачкообразное изменение давления и расхода через клапан в момент его открытия. Поэтому величину хода запорно-регулирующего элемента клапана ограничивают величиной
Еще большего уменьшения размеров пружины и всего клапан в целом при одновременном повышении его герметичности можно достигнуть в клапанах непрямого действия (рис.6.3).

Рис.6.3. Напорный клапан непрямого действия:
а - принципиальная схема; б - условное обозначение
Клапан состоит из основного запорно-регулирующего элемента - золотника 1 ступенчатой формы; нерегулируемой пружины 2 и вспомогательного запорно-регулирующего элемента 3 в виде шарикового клапана прямого действия. Усилие пружины 4 шарикового клапана регулируется винтом 5. Каналами в корпусе клапана полости 7 и 8 соединены с гидролинией 10 высокого давления. Полость 6 соединена с полостью 8 капиллярным каналом 9 в золотнике. Пружины шарикового клапана 3 настраивается на давление PК (на 10…20% больше максимального рабочего в гидросистеме).
Если при работе машины давление в гидросистеме PН < PК, шариковый клапан закрыт, в полостях 6, 7, 8 устанавливается одинаковое давление PН, золотник 1 под воздействием пружины 2 занимает крайнее нижнее положение, а гидролиния высокого давления 10 отделена от гидролинии слива 11 (положение клапана соответствует изображенному на рис.6.3). Изменение давление в гидросистеме вызывает изменения давления в полостях 6, 7, 8 клапана. В тот момент, когда давление P Н превысит PК, шариковый клапан 3 откроется и через него жидкость в небольшом количестве начнет поступать на слив. В капиллярном канале золотника создается течение жидкости с потерей давления на преодоление гидравлических сопротивлений. Вследствие этого давление жидкости в полости 6 станет меньше давления в полостях 7 и 8. Под действием образовавшегося перепада давлений золотник 1 переместится вверх, сжимая пружину и соединяя линию 10 с линией 11. Рабочая жидкость будет поступать на слив, и перегрузки гидросистемы не произойдет. Однако как только линия высокого давления соединится со сливом, давление жидкости в гидросистеме уменьшится до PН < PК, шариковый клапан закроется и течение жидкости по капиллярному каналу прекратится. Давление в полостях 6, 7 и 8 выровняется и под воздействием пружины 2 золотник возвратится в исходное положение, снова отделив линию высокого давления от слива. Если причина, вызвавшая повышение давления в гидросистеме, не будет устранена, процесс повторится и золотник в конечном итоге установится на определенной высоте, при которой давление в гидросистеме будет поддерживаться постоянным.
Когда клапан находится в работе, золотник совершает колебательные движения. Уменьшению колебаний золотника способствует полость 7, оказывающая на него демпфирующее влияние.
Для разгрузки системы или какого-либо ее учатка клапаны непрямого действия могут управляться дистанционно. Для этого полость 6 посредством канала 12 и крана 13 необходимо соединить со сливом. В результате давление в полости 6 резко упадет, золотник 1 поднимется вверх, а линия высокого давления 10 соединится со сливом 11.
По сравнению с клапанами прямого действия клапаны непрямого действия обладают рядом преимуществ:
1. Плавность и бесшумность работы.
2. Повышенная чувствительность.
3. Давление на входе в клапан поддерживается постоянным и не зависит от расхода рабочей жидкости через клапан.
6.3. Редукционный клапан
Редукционным называют гидроклапан давления, предназначенный для поддержания в отводимом от него потоке рабочей жидкости более низкого давления, чем давление в подводимом потоке. В гидроприводах находят применение в основном два типа редукционных клапанов.
Первый тип клапанов обеспечивает установленное соотношение между давлениями на входе и выходе из клапана.
Редукционный клапан (рис.6.4) состоит из запорно-регулирующего элемента - плунжера 1, прижатого к седлу пружиной 2, сила натяжения которой регулируется винтом 3. Отверстие 4 корпуса соединяется с гидролинией высокого давления, а отверстие 5 с гидролинией низкого давления. В исходном положении клапан прижат к седлу, а вход клапана отделен от выхода. При повышении давления P1 плунжер поднимается и гидролиния высокого давления соединяется с гидролинией низкого давления. Чем больше давление P1, тем больше открывается проходное сечение клапана и тем больше становится давление P2.
Таким образом, давление P2 зависит от давления на входе клапана, от начальной силы натяжения Pпр и жесткости пружины c

Рис.6.4. Редукционный клапан:
а - принципиальная схема; б - условное обозначение
Второй тип редукционного клапана поддерживает постоянное редуцированное давление на выходе независимо от колебания давления в подводимом и отводимом потоках рабочей жидкости. Такие редукционные клапаны могут быть прямого и непрямого действия.
Рассмотрим работу редукционного клапана непрямого действия (рис.6.5). Клапан состоит из основного запорно-регулирующего элемента - золотника 1 ступенчатой формы, нагруженного нерегулируемой пружиной 2 с малой жесткостью, и вспомогательного запорно-регулирующего элемента 5 в виде шарикового клапана. Силу натяжения пружины 4 шарикового клапана можно изменять винтом 3. В корпусе клапана имеются каналы, соединяющие полости 7 и 8 с выходом, а в золотнике 1 - капиллярный канал 9, соединяющий полость 6 с полостью 8, а через последнюю и с выходом клапана.
Если пружина 4 настроена на давление большее, чем давление P1 на входе клапана, то золотник 1 занимает исходное положение (показано на рис.6.5). В этом случае в полостях 6, 7 и 8 будет одинаковое давление, равное P1, полость 10 соединена с полостью 11, а жидкость свободно протекает через клапан. Редуцирования давления при этом не происходит. При настройке пружины 4 на давление P2 < P1 шариковый клапан откроется и жидкость в небольшом количестве из полости 6 будет поступать на слив. В капиллярном канале 9 золотника создается течение жидкости с потерей в нем давления на преодоление гидравлических сопротивлений. В результате давление в полости 6 упадет и золотник поднимется вверх, уменьшив площадь живого сечения между полостями 10 и 11.

Рис.6.5. Редукционный клапан непрямого действия:
а - принципиальная схема; б - условное обозначение
Это в свою очередь вызовет понижение давления в полостях 11, 8 и 7, опускание золотника и увеличение площади живого сечения между полостями 10 и 11. Процесс повторится снова, и золотник, совершая колебательные движения, установится на определенной высоте. Всякое изменение давления на входе или выходе клапана вызывает ответное перемещение золотника. В конечном итоге за счет изменения дросселирования давление на выходе клапана поддерживается постоянным. В этом клапане полость 7 и узкий канал, соединяющий полость с выходом клапана, оказывают демпфирующее влияние на золотник, уменьшая его колебания.
6.4. Обратные гидроклапаны
Обратным гидроклапаном называется направляющий гидроаппарат, предназначенный для пропускания рабочей жидкости только в одном направлении. Они могут иметь различные запорно-регулирующие элементы: шариковый, конусный, тарельчатый или плунжерный.
В соответствии со своим назначением обратный клапан должен быть герметичным в закрытом положении, т.е. в исходном положении запорно-регулирующего элемента. Для достижения абсолютной герметичности в закрытом положении применяют обратные клапаны с двумя или тремя последовательно соединенными запорно-регулирующими элементами.
Пружина обратных клапанов нерегулируемая, ее сила натяжения должна обеспечивать лишь преодоление сил трения и инерцию, а также быстрое возвращение в исходное положение запорно-регулирующего элемента.
Рис.6.6. Обратный клапан типа Г51:
а - конструкция; б - условное обозначение
Обратный клапан Г51 (рис.6.6) имеет конусный запорно-регулирующий элемент 5. При подводе рабочей жидкости к отверстию 1 запорно-регулирующий элемент 5 поднимается над седлом 2, преодолевая силу натяжения пружины 4. Жидкость свободно проходит к отверстию 3. При изменении направления потока рабочей жидкости запорно- регулирующий элемент 5 прижат к седлу и блокирует отверстие 1.
В гидросистемах многих мобильных машин обратные клапаны с шариковым рабочим органом применяют в блокировочном устройстве резиновых шлангов (рис.6.7).
Рис.6.7. Блокировочное устройство
Блокировочное устройство имеет подпружиненные шарики 1, которые при разъединении трубопроводов блокируют поток. При соединении труб путем навинчивания гайки 2 на штуцер 4 толкатель 3 отжимает шарики от их седел, позволяя жидкости свободно проходить через устройство.
В гидроприводе обратные клапаны применяют: как подпорные; для создания нерегулируемого противодавления в сливной магистрали гидродвигателя; для блокировки вертикально расположенного поршня от самопроизвольного опускания при выключенном приводе; для неуправляемого пропуска рабочей жидкости в одном направлении и управляемого в другом (совместно с дросселем); для исключения утечек жидкости из гидросистемы при демонтаже и т.д. Как конструктивный элемент обратный клапан включен в конструкцию разделительных панелей, напорных клапанов, дросселей и регуляторов потока, в золотники с гидравлическим управлением, в насосы и гидравлические двигатели, в гидрозамки и т.д.
6.5. Ограничители расхода
Ограничителем расхода называется клапан, предназначенный для ограничения расхода в гидросистеме или на каком-либо ее участке.
Принципиальная схема ограничителя расхода приведена на рис.6.8, а. Он состоит из подвижного поршня 3 и нерегулируемой пружины 6, помещенных внутри корпуса 7. В поршне имеется калибровочное отверстие 2 (нерегулируемый дроссель), а корпусе - окна 4. В сочетании с поршнем 3 окна 4 представляют собой регулируемый дроссель. В исходном положении пружина стремится передвинуть поршень в крайнее левое положение и открыть окна 4. При включении ограничителя расхода в гидросистему жидкость поступает в отверстие 1 и далее проходит через дроссель 2 и окна 4 к отверстию 5. При достижении жидкости через ограничитель расхода у дросселя 2 создается перепад давлений. При увеличении расхода перепад давлений увеличивается и поршень перемещается вправо, частично или полностью перекрывая окна 4. Когда расход в гидросистеме уменьшится, перепад давлений также уменьшится и поршень переместится влево, увеличив открытие окон.

Рис.6.8. Ограничитель расхода:
а - принципиальная схема; б - зависимость Q=f(ΔP); в - условное обозначение
При значении перепада давления ΔP < ΔP0 расход жидкости через ограничитель расхода будет зависеть от ΔP. При ΔP > ΔP0 расход жидкости станет предельным и равным Q0 (см.рис.6.8, б).
6.6. Делители (сумматоры) потока
Делителем потока называется клапан соотношения расходов, предназначенный для разделения одного потока рабочей жидкости на два и более равных потока независимо от величины противодавления в каждом из них. Делители потока применяют в гидроприводах машин, в которых требуется обеспечить синхронизацию движения выходных звеньев параллельно работающих гидродвигателей, преодолевающих неодинаковую нагрузку.

Рис.6.9. Делитель потока:
а - принципиальная схема; б - условное обозначение;
в - условное обозначение сумматора потока
Делитель потока (рис.6.9) состоит из двух нерегулируемых дросселей 1 и двух дросселей 2, проходные сечения которых могут автоматически изменяться благодаря перемещению плунжера 3. При равенстве нагрузок (F1 = F2) и площадей поршней гидроцилиндров давление P1 = P2 , перепад давлений ΔP = (P3 - P4) = 0, плунжер 3 делителя занимает среднее положение, а расходы в обеих линиях одинаковые. Если нагрузка на один из любых гидродвигателей изменится, то под действием возникшего перепада давлений у плунжера делителя он начнет смещаться из среднего положения, изменяя одновременно проходные сечения дросселей 2. Перемещение прекратится, когда давления P3 и P4 выровняются. В этом положении плунжера расходы в обеих ветвях будут одинаковыми. Таким образом, поддержание равенства расходов в обеих ветвях осуществляется за счет дросселирования потока в той ветви, где гидродвигатель нагружен меньше.
Делитель потока может также быть и сумматором потока (рис.6.9, в). В этом случае в подводимых к нему двух трубопроводах поддерживается постоянный расход рабочей жидкости.
6.7. Дроссели и регуляторы расхода
Дроссели и регуляторы расхода предназначены для регулирования расхода рабочей жидкости в гидросистеме или на отдельных ее участках и связанного с этим регулирования скорости движения выходного звена гидродвигателя. Дроссели выполняются по двум принципиальным схемам.

Рис.6.10. Линейный дроссель:
1 - корпус; 2 - винт
Линейные дроссели, в которых потери давления пропорциональны расходу жидкости. В таких дросселях потери давления определяются потерями давления по длине. Изменяя длину канала, по которому движется жидкость, можно изменить потери давления и расход через дроссель. Примером линейного дросселя служит гидроаппарат с дроссельным каналом (рис.6.10).
В этом дросселе жидкость движется по винтовой прямоугольной канавке, длину которой можно изменять поворотом винта. Площадь живого сечения и длину канала устанавливают из условия получения в дросселе требуемого перепада давлений и исключения засоряемости канала механическими примесями, содержащимися в рабочей жидкости. В таких дросселях за счет увеличения длины канала можно увеличить площадь его живого сечения, исключив тем самым засорения дросселя во время его работы.
Нелинейные дроссели характеризуются тем, что режим движения жидкости через них турбулентный, а перепад давлений практически пропорционален квадрату расхода жидкости, поэтому такие дроссели часто называют квадратичными. В них потери давления определяются деформацией потока жидкости и вихреобразованиями, вызванными местными сопротивлениями. Изменение перепада давления, а, следовательно, и изменение расхода жидкости через такие дроссели достигается изменением или площади проходного сечения, или числа местных сопротивлений.
В регулируемых (рис.6.11, а, б, в, г) и нерегулируемых (рис.6.11, д, е) нелинейных дросселях длина пути движения жидкости сведена к минимуму, благодаря чему потери давления и расход практически не зависят от вязкости жидкости и изменяются только при изменении площади рабочего проходного сечения. Максимальную площадь устанавливают из условия пропуска заданного расхода жидкости через полностью открытый дроссель, минимальную - из условия исключения засоряемости рабочего окна.
В пластинчатых дросселях (рис.6.11, е) сопротивление зависит от диаметра отверстия, которое, однако, можно уменьшить лишь до определенного предела (dmin > 0,5 мм), ограничиваемого засоряемости во время работы такого дросселя. Для получения большого сопротивления применяют пакетные дроссели с рядом последовательно соединенных пластин (рис.6.11, д). В таких дросселях расстояние между пластинами l должно быть не менее (3…5) d, а толщина пластин s не более (0,4…0,5) d.

Рис.6.11. Принципиальные схемы нелинейных дросселей:
а - игольчатого; б - комбинированного; в - пробкового щелевого;
г - пробкового эксцентричного; д - пластинчатого пакетного;
е - пластинчатого; ж - условное обозначение регулируемого дросселя;
1 - корпус; 2 - игла; 3 - диафрагма; 4 - пробка; 5 - пластина; 6 - втулка
Суммарное сопротивление пластинчатого дросселя регулируется подбором пластин, а перепад давления определяется по формуле

где γ - удельный вес жидкости; ζ - коэффициент местного сопротивления отверстия; n - число пластин; υ - средняя скорость потока жидкости в проходном отверстии пластины.
К нелинейным дросселям относятся также и комбинированные дроссели, в которых потери давления по длине и местные потери соизмеримы между собой по величине и в равной мере оказывают влияние на расход жидкости через дроссель (рис.6.11, б). На характеристику комбинированных дросселей влияет вязкость рабочих жидкостей. Поэтому такие дроссели целесообразно применять в гидросистемах, в которых температура рабочей жидкости изменяется в небольших пределах.
Для определения расхода жидкости через дроссель пользуются формулой

где ω - площадь проходного сечения дросселя; ΔP - перепад давлений у дросселя; μ - коэффициент расхода, зависящий от конструкции дросселя, числа Рейнольдса, формы и размеров отверстия [Лебедев, ГМЛП, стр.141-142, Навроцкий с.50].
Важной характеристикой дросселей является их равномерная и устойчивая работа при малых расходах. Однако устойчивая работа дросселя возможно при уменьшении площади до определенного предела, ниже которого расход становится нестабильным. Это объясняется облитерацией - заращиванием проходного отверстия.
Сущность облитерации заключается в том, что в микронеровностях узких каналов задерживаются и оседают твердые частицы, содержащиеся в рабочей жидкости. Если размеры частиц, загрязняющих жидкость, соизмеримы с размером рабочего окна, то может произойти полное его заращивание и прекращение расхода жидкости через дроссель. При увеличении площади рабочего окна расход жидкости восстанавливается.
Причиной облитерации рабочего окна может быть не только недостаточная очистка рабочей жидкости, но и адсорбция поляризованных молекул рабочей жидкости на стенках щели. Адсорбируемые молекулы образуют многорядный слой, толщина которого может достигать 10 мкм. Этот слой способен сопротивляться значительным нормальным и сдвигающим нагрузкам. В конечном итоге происходит постепенное уменьшение площади живого сечения рабочего окна, а при малых значениях и полное его заращивание. Соответственно уменьшается до нуля и расход жидкости через дроссель. При страгивании с места запорного элемента дросселя адсорбционный слой молекул разрушается, а первоначальный расход восстанавливается.
Поэтому, чтобы добиться малого расхода в ответственных гидросистемах, применяют специальные конструкции дросселей. В таких дросселях рабочему органу (игле, пробке, диафрагме и т.д.) сообщаются непрерывные вращательные или осциллирующие движения. Благодаря этим движениям на рабочей поверхности проходного окна дросселя не образуется слоя адсорбированных молекул и не происходит заращивание щели.
Рис.6.12. Проливочные характеристики
а - дросселя Г77-11; б - регулятора расхода Г55-21
Недостатком дросселей является неравномерность расхода, вызванная изменением перепада давлений у дросселя. На рис.6.12, а приведена проливочная характеристика дросселя Г77 11 Q = f(ΔP), из которой видно, что с изменением перепада давлений (вызванного, например, изменением нагрузки на гидродвигатель)
Рис.6.12. Проливочные характеристики
а - дросселя Г77-11; б - регулятора расхода Г55-21
Рис.6.12. Проливочные характеристики
а - дросселя Г77-11; б - регулятора расхода Г55-21
Для частичного или полного устранения неравномерности расхода применяют регуляторы расхода, в которых перепад давлений в дросселе ΔP во время его работы поддерживается примерно постоянным. Конструктивно этот аппарат состоит из последовательно включенных редукционного клапана и дросселя. Расход жидкости через регулятор устанавливается дросселем 1, а постоянство перепада давления на дросселе - редукционным клапаном 2 (рис.6.13). При увеличении расхода Q через дроссель увеличивается перепад давлений δP=P1 - P2, который вызывает смещение вверх запорно-регулирующего элемента клапана. Проходное сечение уменьшается, и при этом расход на выходе из регулятора будет уменьшен.
Благодаря постоянству перепада давлений у дросселя расход жидкости через регулятор и скорость движения выходного звена гидродвигателя не изменяются при изменении нагрузки. Вид проливочной характеристики Q = f(ΔP) регулятора расхода Г55-21 приведен на рис.6.12, б, а его конструкция на рис.6.14.
При работе гидропривода вследствие изменения коэффициента расхода μ, вызванного колебаниями температры рабочей жидкости, расход через регулятор все же изменяется. Для серийных конструкций регуляторов это изменение составляет 10…12%.
7. Вспомогательные устройства гидросистем
Вспомогательные устройства гидросистем обеспечивают надежную работу насосов, гидродвигателей, гидроаппаратуры и всего гидропривода в целом. К вспомогательным устройствам относятся: гидробаки и теплообменники для рабочей жидкости, фильтры, уплотнительные устройства, гидроаккумуляторы, гидравлические замки, а также элементы, которыми обеспечивается подача команд на включение и выключение исполнительных механизмов.
7.1. Гидробаки и теплообменники
Гидробаки предназначены для питания гидропривода рабочей жидкостью. Кроме того, через гидробак осуществляется теплообмен между рабочей жидкостью и окружающим пространством; в нем происходит выделение из рабочей жидкости воздуха, пеногашение и оседание механических и других примесей.
Рис.7.1. Гидробак:
1 - указатель масла; 2- всасывающая труба; 3 - крышка; 4 - сапун;
5 - глазок; 6 - сливная труба; 7 - фильтр; 8 - сетчатый фильтр (ячейки 0,1 0,1 мм);
9 - заливное отверстие; 10 - магнитная пробка;
11 - крышка для слива РЖ; 12 - перегородки (успокоители)
Гидробаки изготавливают сварными из листовой стали толщиной 1-2 мм или литыми из чугуна. Форма гидробаков чаще всего прямоугольная. Внутри гидробака имеются перегородки 12, которыми всасывающая труба отделена от сливной 6. Кроме того, перегородки удлиняют путь циркуляции рабочей жидкости, благодаря чему улучшаются условия для пеногашения и оседания на дно гидробака примесей, содержащихся в рабочей жидкости. Лучшему выделению воздуха из рабочей жидкости способствует мелкая сетка, поставленная в гидробаке под углом. Для выравнивания уровня жидкости в гидробаке перегородки имеют отверстия на выоте 50…100 мм от дна. Заливку рабочей жидкости производят через отверстие 9 с сетчатым фильтром 8, имеющим ячейки размером не более 0,1 0,1 мм. Отверстие для заливки закрывают пробкой. Для контроля уровня рабочей жидкости в гидробаке служат указатель 1 или смотровой глазок 5.
Для выравнивания давления над поверхностью жидкости в баке с атмосферным давлением служит сапун 4. Возможны случаи, когда давление в гидробаке отличается от атмосферного (избыточное давление или вакуум).
Сливную и всасывающую трубы устанавливают на высоте h = (2…3) d от дна бака, а концы труб скашивают под углом 45°. При этом скос сливной трубы направлен к стенке, а всасывающей - от стенки. Такое расположение концов труб уменьшает смешивание жидкости с воздухом, взмучивание осадков и попадание примесей во всасывающую гидролинию. В верхней части сливной трубы может быть установлен фильтр.
Дно гидробака имеет отверстие с крышкой 11 для спуска рабочей жидкости, периодической очистки и промывки гидроемкости. На дне также могут быть установлены магнитные пробки 10 для задержания металлических примесей. Крышка 3 бывает съемной. С гидробаком она соединяется через уплотнитель из маслостойкой резины.
В процессе эксплуатации гидропривода температура рабочей жидкости не должна превышать 55…60° С и в отдельных случаях 80° С. Если поддержание температуры в пределах установленной не может быть обеспечено естественным охлаждением, в гидросистеме устанавливают теплообменники.
В гидроприводах применяют два типа теплообменников: с водяным и воздушным охлаждением.
Теплообменники с водяным охлаждением имеют небольшие размеры. В отличие от воздушных, они более эффективны, но требуют дополнительного оборудования для подачи охлаждающей жидкости. Конструктивно теплообменник представляет собой змеевик 2 из стальной трубы (рис.7.2, а), размещенной в гидробаке 1.
Теплообменники с водяным охлаждение целесообразно применять в гидроприводах стационарных машин, работающих в тяжелых условиях.

Рис.7.2. Теплообменники:
а - с водяным охлаждением; 1 - бак; 2 - змеевик;
б - с воздушным охлаждением; 1 - радиатор; 2 - вентилятор; 3 - магнитный пускатель;
4 - реле; 5 - терморегулятор; 6 - датчик температуры
Теплообменники с воздушным охлаждением выполняют по типу автомобильных радиаторов или в виде труб, оребренных для увеличения поверхности теплопередачи. Для увеличения эффективности теплопередачи поверхность теплообменника обдувается воздухом от вентилятора.
Для поддержания постоянной температуры рабочей жидкости может быть применен автоматический терморегулятор (рис.7.2, б). При повышении температуры рабочей жидкости реле 4 терморегулятора 5 замыкает цепь магнитного пускателя 3 электродвигателя, на валу которого установлен вентилятор 2. Поток воздуха обдувает теплообменник 1. При уменьшении температуры ниже заданного уровня электродвигатель вентилятора отключается. Терморегулятор работает от датчика температуры 6.
7.2. Фильтры
Фильтры служат для очистки рабочей жидкости от содержащихся в ней примесей. Эти примеси состоят из посторонних частиц, попадающих в гидросистему извне (через зазоры в уплотнениях, при заливке и доливке рабочей жидкости в гидробак и т.д.), из продуктов износа гидроагрегата и продуктов окисления рабочей жидкости.
Механические примеси вызывают абразивный износ и приводят к заклиниванию подвижных пар, ухудшают смазку трущихся деталей гидропривода, снижают химическую стойкость рабочей жидкости, засоряют узкие каналы в регулирующей гидроаппаратуре.
Примеси задерживаются фильтрами (рис.7.3), принцип работы которых основан на пропуске жидкости через фильтрующие элементы (щелевые, сетчатые, пористые) или через силовые поля (сепараторы). В первом случае примеси задерживаются на поверхности или в глубине фильтрующих элементов, во втором рабочая жидкость проходит через искусственно создаваемое магнитное, электрическое, центробежное или гравитационное поле, где происходит оседание примесей.

Рис.7.3. Схема фильтрации рабочей жидкости
По тонкости очистки, т.е. по размеру задерживаемых частиц фильтры делятся на фильтры грубой, нормальной и тонкой очистки.
Фильтры грубой очистки задерживают частицы размером до 0,1 мм (сетчатые, пластинчатые) и устанавливаются в отверстиях для заливки рабочей жидкости в гидробаки, во всасывающих и напорных гидролиниях и служат для предварительной очистки.
Фильтры нормальной очистки задерживают частицы от 0,1 до 0,05 мм (сетчатые, пластинчатые, магнитно-сетчатые) и устанавливаются на напорных и сливных гидролиниях.
Фильтры тонкой очистки задерживают частицы размером менее 0,05 мм (картонные, войлочные, керамические), рассчитаны на небольшой расход и устанавливаются в ответвлениях от гидромагистралей.
В зависимости от мест установки фильтров в гидросистеме различают фильтры высокого и фильтры низкого давления. Последние можно устанавливать только на всасывающих или сливных гидролиниях.
Конструкции фильтров.
Сетчатые фильтры устанавливают на всасывающих и сливных гидролиниях, а также в заливочных отверстиях гидробаков. Фильтрующим элементом является латунная сетка, размер ячеек которой определяет тонкость очистки рабочей жидкости. Сетка устанавливается в один и более слоев. Для уменьшения сопротивления фильтрующую поверхность делают как можно большей.

Рис.7.4. Сетчатый фильтр
1 - корпус; 2 - сетка; 3 - диски; 4 - перфорированная трубка; 5 - гайка; 6 - прокладки.
На рис.7.4. изображена конструкция сетчатого фильтра. Фильтр состоит из корпуса 1 с отверстиями для пропуска рабочей жидкости и обтянутого двумя слоями сетки 2. Торцевые поверхности фильтра закрыты двумя дисками 3. Через центральные отверстия дисков проходит стальная перфорированная труба 4, соединяемая с всасывающей трубой насосной установки.
Проволочные фильтры имеют аналогичную конструкцию. Они состоят из трубы с большим количеством радиальных отверстий или пазов, на наружной поверхности которой навивается калибровочная проволока круглого или трапециевидного сечения. Зазор между рядами проволок определяет тонкость фильтрации рабочей жидкости (до 0,05 мм). Недостаток сетчатых и проволочных фильтров - трудность очистки фильтрующих элементов от скопившихся на их поверхности загрязнений.
Пластинчатые (щелевые) фильтры устанавливают на напорных и сливных гидролиниях гидросистем. Пластинчатый фильтр типа Г41 (рис.7.5) состоит из корпуса 1, крышки 2 и оси 3, на которой закреплен пакет фильтрующих элементов. Крышка, имеющая отверстия для подвода и отвода жидкости, крепится к корпусу болтами, а стык между ними уплотняется резиновым кольцом 4. Пакет фильтрующих элементов состоит из набора основных 5 и промежуточных пластин 6. Жидкость поступает в корпус фильтра и через щели между основными и промежуточными пластинами попадает во внутреннюю полость фильтра, образованную вырезами в основных пластинах. При протекании жидкости через щели содержащиеся в ней механические примеси задерживаются. Тонкость очистки зависит от толщины промежуточных пластин. В процессе эксплуатации фильтра щели засоряются. Для очистки служат скребки 7, укрепленные на шпильке 8. При повороте рукояткой оси 3 скребки, помещенные между основными и промежуточными пластинами, очищают слой загрязнений на входе в щели. При скапливании загрязнений на дне корпуса производится их удаление через отверстие в нижней части корпуса 9. Такой сравнительно простой способ очистки является достоинством пластинчатых фильтров.

Рис.7.5. Пластинчатый фильтр типа Г41:
1 - корпус; 2 - крышка; 3 - ось; 4 - резиновое кольцо; 5 - основные пластины;
6 - промежуточные пластины; 7 - скребки; 8 - шпилька; 9 - пробка.
Пластинчатые фильтры Г41 выпускают на расход до 70 л/мин при перепаде давлений 0,1 и 0,2 МПа. В зависимости от типоразмера фильтров наименьший размер задерживаемых частиц составляет 0,08, 0,12 и 0,2 мм.
Сетчатые, проволочные и щелевые фильтры имеют небольшое сопротивление при протекании через них рабочей жидкости, но тонкость их очистки невелика.
Для улучшения очистки рабочей жидкости применяют фильтры тонкой очистки, которые имеют большое сопротивление и рассчитаны на небольшие расходы. Их устанавливают на ответвлениях от гидромагистралей. Во избежание быстрого засорения перед фильтрами тонкой очистки устанавливают фильтры грубой очистки.
В фильтрах тонкой очистки используют тканевые, картонные, войлочные и керамические фильтрующие элементы.
Фильтры с картонными и тканевыми элементами задерживают за один проход значительную (до 75%) часть твердых включений размером более 4-5 мкм. Схема такого фильтра с комбинированным элементом, состоящим из элементов тонкой 2 и грубой 1 очистки, представлена на рис.7.6. До открытия перепускного клапана 3 жидкость последовательно проходит через оба элемента (рис.7.6, а). При засорении элемента тонкой очистки открывается перепускной клапан 3, и жидкость через элемент грубой очистки поступает к выходному штуцеру, минуя элемент тонкой очистки (рис.7.6, б).
Рис.7.6. Комбинированный фильтр из элементов грубой и тонкой очистки
Бумажный элемент обычно выполняется в виде цилиндра, стенки которого для увеличения фильтрующей поверхности собирают в складки той или иной формы (рис.7.7).
Войлочные и металлокерамические фильтры относятся к фильтрам тонкой очистки. Их также называют глубинными, поскольку жидкость проходит через толщу пористого материала (наполнителя). Они имеют более высокую грязеемкость и сравнительно большой срок службы.
| 
|
| Рис.7.7. Бумажный фильтроэлемент | Рис.7.8. Структура фильтроматериала из спеченных шариков |
Широко распространены фильтры глубинного типа с наполнителями из пористых металлов и керамики, получаемые путем спекания металлических и неметаллических порошков. Схема пористой структуры металлокерамического фильтроматериала представлена на рис.7.8. Жидкость очищается, протекая по длинным и извилистым каналам между шариками.
Войлочные фильтры (рис.7.9) состоят из корпуса 1, крышки 2 с отверстиями для подвода и отвода рабочей жидкости, перфорированной трубы 3 с закрепленными на ней фильтрующими элементами в виде войлочных колец 4.
Сепараторы имеют неограниченную пропускную способность при малом сопротивлении. Принцип их работы основан на пропуске рабочей жидкости через силовые поля, которые задерживают примеси. В качестве примера на рис.7.10 приведена конструкция магнитного фильтра С43-3, предназначенного для улавливания ферромагнитных примесей. Фильтр состоит из корпуса 3, крышки 8 с ввернутой в нее латунной трубой 7 и магнитного уловителя. Уловитель включает круглую шайбу 4 с шестью отверстиями, в которые запрессованы постоянные магниты 9. От крышки фильтра магниты изолированы фибровой прокладкой 5. В нижней части трубы укреплена латунная шайба 2, предназначенная для экранирования магнитного поля, создаваемого постоянными магнитами, и исключения его замыкания на корпус фильтра.
Содержащиеся в жидкости ферромагнитные примеси задерживаются на поверхности магнитов, а по мере необходимости удаляются из корпуса через отверстие, закрываемое пробкой 1.

| |
| Рис.7.9. Войлочный фильтр типа Г43: 1 - корпус; 2 - крышка; 3 - перфорированная труба; 4 - фильтрующие элементы | Рис.7.10. Магнитный фильтр типа С43-3: 1 - пробка; 2 - латунная шайба; 3 - корпус; 4 - шайба; 5 - прокладка; 6 - уплотнение; 7 - латунная труба; 8 - крышка; 9 - магниты |
Установка фильтров в гидросистему.
При выборе схемы установки необходимо учесть многие факторы:
- источник загрязнений;
- чувствительность элементов гидропривода к загрязнениям;
- режим работы машины;
- рабочее давление;
- регулярность и нерегулярность обслуживания;
- тип рабочей жидкости;
- условия эксплуатации.
Установка возможна на всасывающей, напорной и сливной гидролиниях (рис.7.11), а также в ответвлениях.
Рис.7.11. Схемы включения фильтров:
а - на всасывающей гидролинии; б - в напорной гидролинии;
в - в сливной гидролинии
Установка фильтров на всасывающей гидролинии обеспечивает защиту всех элементов гидросистемы. Недостатки: ухудшатся всасывающая способность насосов и возможно появление кавитации. Дополнительно устанавливают индикатор, выключающий привод насоса совместно с обратным клапаном, включающимся в работу при недопустимом засорении (рис.7.11, а).
Установка фильтров в напорной гидролинии обеспечивает защиту всех элементов, кроме насоса. Засорение может вызвать разрушение фильтрующих элементов. Для этого устанавливают предохранительные клапаны (рис.7.11, б).
Установка фильтров на сливной гидролинии наиболее распространена, так как фильтры не испытывают высокого давления, не создают дополнительного сопротивления на всасывающей и напорной гидролинии и задерживают все механические примеси, содержащиеся в рабочей жидкости, возвращающейся в гидробак. Недостаток такой схемы заключается в создании подпора в сливной гидролинии, что не всегда является желательным.
Установка на ответвлениях не обеспечивает полной защиты, но уменьшает общую загрязненность рабочей жидкости. Монтируется как дополнительная очистка к основной очистке. Наиболее выгодна схема установки фильтра тонкой очистки в ответвлениях от сливной гидролинии.
При установке фильтров гидролинию с реверсивными потоками рабочей жидкости обратные клапаны обеспечивают пропуск жидкости через фильтр только в одном направлении (рис.7.12).
Контроль за работой фильтров осуществляется по манометрам. Увеличение перепада давлений свидетельствует о засоренности фильтра и, следовательно, о необходимости замены или промывки фильтрующих элементов
| . |
| Рис.7.12. Схема включения фильтра на участке с реверсивным движением |
7.3. Уплотнительные устройства
Назначение уплотнительных устройств - устранение утечек и перетечек рабочей жидкости через зазоры между сопрягаемыми деталями элементов гидропривода, вызванных перепадом давлений.
К уплотнительным устройствам предъявляются следующие требования: износостойкость; совместимость с конструкционными материалами и рабочей жидкостью; устойчивость к температурным колебаниям; удобность монтажа-демонтажа; невысокая стоимость.
Уплотнительные устройства делятся на две группы:
уплотнения неподвижных соединений, которые должны обеспечивать абсолютную герметичность при всех режимах работы гидропривода;
уплотнения подвижных соединений, допускающие возможность регламентированных утечек и перетечек рабочей жидкости.
Уплотнение считается герметичным, если после длительной выдержки под давлением (для неподвижных соединений) или после установленного числа перемещений (для подвижных соединений) утечки рабочей жидкости не превышают предельно допустимые.
Уплотнение неподвижных соединений.
В неразъемных соединениях герметичность достигается пайкой и сваркой деталей.
В разъемных соединениях утечки устраняются несколькими способами: путем деформации уплотняемых поверхностей внешней силой; взаимной приработкой уплотняемых поверхностей; заполнением микронеровностей на уплотняемых поверхностях различными заполнителями (прокладки из картона, кожи, резины и т.д.). При этом при всех способах между соединяемыми деталями должно быть создано контактное давление (путем затяжки крепежными элементами), превышающее максимальное рабочее давление. Некоторые способы уплотнения неподвижных соединений мягкими прокладками и кольцами представлены на рис.7.13.
Рис.7.13. Герметизация неподвижных соединений
Для изготовления прокладок применяют различные неметаллические и металлические эластичные материалы, способные компенсировать при затяжке соединения неровности и другие дефекты поверхностей уплотняемой пары.
Уплотнение подвижных соединений.
Уплотнение может быть бесконтактным (щелевым) или контактным (выполненным при помощи различных уплотнителей).
Щелевое уплотнение (рис.7.14, а) распространено во многих гидроагрегатах (насосы, распределители и т.д.). Снижение утечек достигается за счет уменьшения зазора s между подвижными деталями. Утечки неизбежны и заранее определяются для цилиндрических деталей по формуле:
где d - диаметр уплотняемого соединения; s - зазор между деталями соединения; l - длина уплотнения; υ - относительная скорость перемещения деталей; μ - динамический коэффициент вязкости жидкости.

Рис.7.14. Схемы уплотнений:
а - щелевого; б, в - лабиринтного
Для повышения сопротивления щели при высоких Re, соответствующих турбулентному режиму течения на одной (рис.7.14, б) или обеих (рис.7.14, в) поверхностях, образующих щель, выполняют лабиринтные канавки, которые вследствие чередующегося изменения сечения щели повышают ее сопротивление.
Недостаток щелевого уплотнения - высокая стоимость изготовления сопрягаемых деталей и возможность облитерации щели.
Контактные уплотнения выполняются при помощи металлических и резиновых колец, набивочных уплотнений и манжет.
Уплотнение металлическими кольцами - одно из самых простых и долговечных уплотнений. Материал колец - серый чугун, бронза, текстолит, графит и металлографитовая масса. Стыки колец (рис.7.15) могут быть прямыми (при Р5 МПа), косыми (при Р 20 МПа) и ступенчатыми (при Р>20 МПа). В ступенчатом замке (см. рис.7.15, г) часто одну из сопряженных поверхностей выполняют плоской, а вторую - несколько выпуклой, благодаря чему повышается удельное давление в стыке колец, способствующее повышению герметичности. Форма поперечного сечения прямоугольная. Число колец в уплотнении колеблется от 2 до 9, в зависимости от перепада давлений. Расстояние между кольцами на качество уплотнения не влияет.
20 МПа) и ступенчатыми (при Р>20 МПа). В ступенчатом замке (см. рис.7.15, г) часто одну из сопряженных поверхностей выполняют плоской, а вторую - несколько выпуклой, благодаря чему повышается удельное давление в стыке колец, способствующее повышению герметичности. Форма поперечного сечения прямоугольная. Число колец в уплотнении колеблется от 2 до 9, в зависимости от перепада давлений. Расстояние между кольцами на качество уплотнения не влияет.
Рис.7.15. Типы стыковых замков металлических колец:
а - прямой; б - косой; в, г - ступенчатый
К недостаткам уплотнения металлическими кольцами относится необходимость точного изготовления деталей соединения, т.к. кольца не компенсируют микронеровности, овальность, конусность и т.п. Уплотнение из колец создает дополнительную силу трения. Уплотнение не является абсолютно герметичным и определяется как и при щелевом уплотнении.
Уплотнение резиновыми кольцами является простым, компактным и достаточно надежным. Уплотнение применяется при неподвижных (при Р30 МПа) и подвижных соединениях (при Р20 МПа). Диапазон температур -50…+100 С. Герметичность достигается за счет монтажного сжатия резины и ее плотного прилегания к поверхности деталей (рис.7.16). Материал - маслостойкая резина. Форма поперечного сечения круглая (предпочтительно) или прямоугольная (может скручиваться и вдавливаться в зазор). При уплотнении резиновыми кольцами утечки практически отсутствуют. На рис.7.16 показана схема уплотнений резиновых кольцом круглого сечения. Размеры колец и канавок подбирают таким образом, чтобы при монтаже кольца в канавке (при нулевом обжатии) был сохранен боковой зазор (а - d) = 0,2…0,25 мм (рис.7.16, а). При монтажном сжатии кольцо поджимается на величину k = d - b (рис.7.16, б). Таким предварительным сжатием кольца создается герметичность соединений при нулевом и малом давлении жидкости. При наличии же давления кольцо под его действием деформируясь у внешней стороны канавки, создает плотный контакт с уплотняемыми поверхностями (рис.7.16, в).
Рис.7.16. Схемы уплотнений резиновым кольцом
круглого сечения
Набивочные уплотнения (рис.7.17) применяют в гидравлических прессах, гидроцилиндрах, насосах и некоторой гидроаппаратуре. Материал - мягкие (хлопчато-бумажные, пеньковые, асбестовые) набивки пропитанные коллоидным графитом, церезином, суспензией фторопласта или жиром, и твердые (металлические, пластмассовые) набивки. При сдавливании набивки 1 нажимной буксой 2 набивочный материал течет в радиальном направлении, образуя плотный контакт между камерой сальника и набивкой с одной стороны и подвижной деталью (штоком или валом) - с другой. Для компенсации износа набивочные сальники требуют периодической подтяжки. Сдавливание набивки происходит при помощи болтов (рис.7.17, а) или пружины (рис.7.17, б).
Рис.7.17. Герметизация набивками и сдавливание набивки:
а - болтами; б - пружиной
Набивочные уплотнения используют при небольших давлениях (при Р5 МПа). Срок службы мягких набивок до 800 часов.
Манжетное уплотнение применяют при Р до 50 МПа, скоростях перемещения уплотняемых деталей до 20 м/с. Диапазон температур -50…+100 С. Манжеты имеют шевронную и V-образную форму. Герметичность обеспечивается за счет деформации при монтаже и от давления рабочей жидкости (рис.7.18). Количество манжет зависит от диаметра и давления.
Рис.7.18. Схема действия манжетного уплотнения:
а - манжета до монтажа; б - манжета в смонтированном виде без
давления жидкости; в - манжета под давлением
Наиболее распространены U образные (рис.7.19, а, в) и V образные (шевронные) манжеты (рис.7.19, г). Для уплотнения при давлении рабочей среды до 35 МПа применяют U образные манжеты и при давлении до 50 МПа и выше - шевронные. Для сохранения формы манжету помещают при монтаже уплотнительного пакета между фасонными опорными 1 и распорными 2 кольцами (манжетодержателями) из металла или текстолита (рис.7.19, б).

Рис.7.19. Типовые формы манжет:
а, в - U-образные; б - монтаж манжет; г - шевронные
Уплотнение (герметизация) вращающихся валов осуществляется при помощи армированных манжет (рис.7.20), состоящих из металлического каркаса 1, манжеты 2 и спиральной пружины 3, обеспечивающей дополнительное прижатие манжеты к валу.
Рис.7.20. Манжеты для уплотнения вращающихся валов:
а - с наружным каркасом; б - с внутренним каркасом;
1 - металлический каркас; 2 - манжета; 3 - пружина
При выборе типа и материала уплотнений учитывают: давление в гидросистеме; диапазон рабочих температур; характер движения соединяемых деталей; скорость движения; тип рабочей жидкости.
7.4. Гидравлические аккумуляторы
Гидравлическим аккумулятором называется гидроемкость, предназначенная для аккумулирования энергии рабочей жидкости, находящейся под давлением, с целью последующего использования этой энергии в гидроприводе. В зависимости от носителя потенциальной энергии гидроаккумуляторы подразделяют на грузовые, пружинные и пневматические.
Рис.7.21. Гидроаккумуляторы:
а - грузовой; б - пружинный; в - пневмогидравлический с упругим разделителем
Грузовой аккумулятор (рис.7.21, а) состоит из цилиндра 1, плунжера 2 и груза 3 весом 2G. При зарядке плунжер поднимается (происходит увеличение потенциальной энергии), при разрядке - опускается. Давление разрядки постоянно, но громоздкость ограничивает их применение.
Пружинный аккумулятор (рис.7.21, б) состоит из цилиндра 2, поршня 1, пружины 3, помещенной в корпусе 4. Зарядка и разрядка происходит через отверстие 5. Они компактны, но есть недостаток - неравномерность давления в начале и в конце цикла разрядки, малый полезный объем.
Пневмогидравлический аккумулятор (рис.7.21, в) с упругим разделителем состоит из баллона 1 и эластичной диафрагмы 2, закрепленной в верхней части аккумулятора. Зарядку газом производят через отверстие 4, а рабочей жидкостью через отверстие 3. Верхняя часть заполняется газом до начального давления PН, соответствующего минимальному рабочему Pmin в гидросистеме. Рабочая жидкость заполняет нижнюю часть до давления Pmax, равного максимальному давлению в гидросистеме. Газ сжимается также до давления Pmax. Когда давление в гидросистеме станет меньше Pmax, рабочая жидкость вытесняется из гидроаккумулятора. Кольцо 5 предохраняет диафрагму от продавливания и повреждения. Достоинства: не требует частой подзарядки газом; безынерционен; пригоден к эксплуатации после длительного перерыва в работе и устанавливается в любом положении.
Гидроаккумуляторы поддерживают на заданном уровне давление, компенсируют утечки, сглаживают пульсацию давления, создаваемую насосами, выполняют функцию демпфера, предохраняют систему от забросов давления вызванных наездом машин на дорожные препятствия. Так же используются для достижения большей скорости холостого хода при совместной работе с насосами.
В схеме на рис.7.22 гидроаккумулятор 5 выполняет функцию компенсатора утечек и поддерживает постоянным давление в гидроприводе машины для удержания груза. При наложении грузозахватного органа на груз насос клапаном 2 разгружен, а требуемое давление в рабочей полости гидроцилиндра 6 поддерживается гидроаккумулятором. Обратный клапан 8 в этой схеме блокирует аккумулятор от линии слива при разгруженном насосе. Распределитель 1 управления клапаном 2 включается от реле давления 7, которое настраивают на рабочее давление. Дроссель 3 служит для регулирования расхода при разрядке аккумулятора. Зарядка аккумулятора происходит через обратный клапан 4 в конце сжатия груза.

Риc.7.22. Схема включения гидроаккумулятора для компенсации утечек:
1 - распределитель; 2 - предохранительный клапан непрямого действия;
3 - дроссель; 4, 8 - обратный клапан; 5 - гидроаккумулятор;
6 - гидроцилиндр; 7 - реле давления
По сравнению с безаккумуляторным рассмотренный гидропривод имеет меньшие габарит, массу и может быть более экономичным, так как потребляемая насосом мощность будет меньше за счет уменьшения времени работы насоса под нагрузкой.
7.5. Гидрозамки
Гидрозамком называется направляющий гидроаппарат, предназначенный для пропускания потока рабочей жидкости в одном направлении при отсутствии управляющего воздействия, а при наличии управляющего воздействия - в обоих направлениях.
По числу запорно-регулирующих элементов гидрозамки могут быть одно- и двухсторонними.
Рис.7.23. Односторонний гидрозамок
а - подача рабочей жидкости к полости А; б - течение жидкости из полости А в полость Б;
в - подача рабочей жидкости в полость Б; г - течение жидкости из полости Б в полость А
при наличии управляющего воздействия; д - условное обозначение одностороннего гидрозамка
Односторонний гидрозамок (рис.7.23) имеет толкатель 3, запорно-регулирующий элемент 1 и нерегулируемую пружину 2, которые образуют подобие обратного клапана. У одностороннего гидрозамка выполнено три подвода, соединенные с тремя полостями гидрозамка А, Б и У. При подаче рабочей жидкости под давлением в полость А (рис.7.23, а), открывается запорно-регулирующий элемент 1, и жидкость начинает свободно проходить в полость Б (рис. 7.23, б). Управляющее воздействие отсутствует, т.е. в полость У давление жидкости не подается. При подводе рабочей жидкости к полости Б клапан закрыт (рис.7.23, в). Однако, если одновременно с этим подвести жидкость к полости У (подать управляющее воздействие), то толкатель 3 перемещаясь вверх откроет запорно-регулирующий элемент. В этом случае жидкость будет свободно проходить из полости Б в полость А (рис.7.23, г), пока будет присутствовать управляющее воздействие в полости У.
Односторонние гидрозамки применяются для блокировки движения выходного звена гидродвигателя в одном направлении. Для блокировки выходного звена в двух направлениях применяются двухсторонние гидрозамки.
Двухсторонний гидрозамок (рис.7.24) имеет в своем корпусе два запорно-регулирующих элемента 1, две нерегулируемые пружины 2, а между ними плавающий толкатель 3 (рис.7.24, а). При подводе рабочей жидкости под давлением к каналу А открывается запорно-регулирующий элемент 1, и жидкость свободно поступает в канал В и далее к гидродвигателю (например в поршневую полость гидроцилиндра). Одновременно с этим толкатель 3 гидрозамка перемещается вправо и открывает второй запорно-регулирующий элемент, обеспечивая пропуск жидкости (например, от штоковой полости гидроцилиндра) из канала Г в канал Б и далее в сливную магистраль. Аналогично гидрозамок работает при реверсе движения выходного звена гидродвигателя. Если жидкость под давлением не подводится ни к одному из каналов (А или В), то рабочие элементы 1 снова занимают положение, указанное на рис.7.24, а. Полости гидродвигателя блокируются от слива, тем самым, блокируя выходное звено гидродвигателя от перемещений.
Рис.7.24. Двухсторонний гидрозамок:
а - нейтральное положение; б - положение толкателя при подводе
давления в канал А; в - положение толкателя при подводе давления в канал В;
г - условные обозначения
При установке гидрозамков необходимо учитывать их конструктивное исполнение (тип), способ нагружения выходного звена гидродвигателя, а также место размещения при этом дросселей с обратными клапанами - до или после гидрозамка. Дроссели с обратными клапанами свободно пропускают поток рабочей жидкости на подъем рабочего органа и ограничивают расход рабочей жидкости и соответственно скорость рабочего органа при его опускании (рис.7.25).
Рис.7.25. Схема установки одностороннего гидрозамка:
а - без дросселя с обратным клапаном; б - дросселем и обратным клапаном
Если в схеме привода гидроцилиндра грузоподъемного механизма с гидрозамком не будет установлен дроссель с обратным клапаном (рис.7.25, а), то при перемещении золотника гидрораспределителя в позицию "опускание" в гидролинии насоса и управления гидрозамком создается давление, достаточное для открытия гидрозамка. После его открытия рабочая жидкость из штоковой полости гидроцилиндра поступает на слив, и шток опускается под действием внешней нагрузки F. При этом скорость перемещения штока гидроцилиндра может превысить скорость, обусловленную подачей насоса. Тогда давление в противоположной (поршневой) полости гидроцилиндра и в гидролинии управления уменьшается, запорный элемент гидрозамка под действием пружины закрывается и движение прекращается. Затем давление в напорной гидролинии и в гидролинии управления снова возрастает, и гидрозамок открывается. Таким образом, происходят прерывистое движение рабочего органа и пульсация давления. Для исключения этого явления между гидрозамком и гидроцилиндром рекомендуется устанавливать дроссель с обратным клапаном (см. рис.7.25, б), сопротивление которого при опускании штока создает давление, необходимое для открытия обратного клапана гидрозамка и поддержания его в том положении.
Давление управления для гидрозамков составляет от 0,02 (минимальное давление срабатывания ненагруженного клапана) до 32 МПа.
В гидросистемах мобильных машин наибольшее применение получили односторонние гидрозамки с коническим запорным элементом, имеющие условный проход 16, 20, 25 и 32 мм.
7.6. Гидравлические реле давления и времени
Реле давления применяется для последовательного включения или выключения отдельных исполнительных органов машины и для осуществления дистанционного управления. Реле давления может обеспечить контроль за давлением в гидросистеме с подачей электросигнала, свидетельствующего, например, о перегрузке системы.
Реле давления Г62-21 (рис.7.26) состоит из корпуса 1, диафрагмы 2, пружины 3, рычага 4 с осью 5, винта 6, микропереключателя 7. Жидкость на контролируемой ветви гидросистемы подводится к отверстию 9. Если подведенное давление окажется выше установленного настройкой пружины 3, то диафрагма 2 деформируется и передает давление на рычаг 4, который при повороте вокруг оси 5 винтом 6 воздействует на микропереключатель 7. Регулировка реле давления осуществляется при помощи изменения сжатия пружины 3 винтом 8.
С момента начала деформации диафрагмы 2 до момента срабатывания реле, т.е. до момента включения микропереключателя 7, произойдет увеличение давления, которое характеризует нечувствительность аппарата,

где ΔL - путь перемещения рычага 4, необходимый для включения микропереключателя; c - жесткость пружины; Ω - активная площадь диафрагмы.
Нечувствительность реле давления различных типоразмеров колеблется от 0,3 до 1,0 МПа. Контролируемое давление находится в диапазоне от 0,5 до 32 МПа.
Рис.7.26. Реле давления Г62-2:
а - конструкция; б - условное обозначение реле давления;
1 - корпус; 2 - диафрагма; 3 - пружина; 4 - рычаг; 5 ось рычага;
6, 8 -винты; 9 - отверстие
Гидравлическое реле времени (или гидроклапан выдержки времени) это направляющий гидроаппарат предназначенный для пуска или остановки потока рабочей жидкости через заданный промежуток времени после подачи управляющего сигнала. Гидравлические реле времени применяются для обеспечения определенной выдержки во времени между различными циклами срабатывания исполнительных механизмов машины.
Время срабатывания реле времени определяется временем необходимым для вытеснения жидкости из гидроемкости 1. Поршень 3 приводит в движение пружина 4, а рычагом 5 осуществляется нажатие на штифт микропереключателя 6. Зарядка емкости реле времени происходит через обратный клапан 7 (рис.7.27, а).
Рис.7.27. Реле времени:
а - принципиальная схема; б - вариант схемы включения
Рассмотрим пример установки реле времени. В данной схеме шток гидроцилиндра автоматически совершает холостой и рабочий ход, останавливаясь в конце каждого хода на установленное время (рис.7.27, б). В положении распределителя 1 поршень гидроцилиндра движется вправо, совершая рабочий ход. Одновременно через гидрораспределитель 2 происходит зарядка емкости реле времени. К моменту нажатия упором на путевой переключатель 3 емкость будет уже заполнена, а рабочий ход завершен. Путевой переключатель 3 переключит гидрораспределитель 2, и начнется истечение жидкости через дроссель. После установленного времени (времени истечения рабочей жидкости из емкости реле времени) за счет выключателя 4 переключатся гидрораспределители 1 и 2. Начнется холостой ход штока, и одновременно будет заряжаться емкость реле времени. В конце холостого хода путевой переключатель 5 переключит распределитель 2 и емкость реле времени снова начнет разряжаться. После ее разрядки выключатель 4 переключит распределители в начальное положение, обеспечив рабочий ход.

Рис.7.28. Реле времени дроссельного типа
1, 11 - пружины; 2 - золотник; 3, 4 - подводящее и отводящее отверстия;
5, 8 - полости; 6 - канал; 7 - дроссель; 9 - сливное отверстие; 10 - шарик;
12 - колпачок; 13 - контрогайка

Рис.7.29. Реле времени объемного типа
1, 4 - отверстия; 2, 6, 7 - полости; 3, 5 - каналы; 8 - поршень;
9, 13 - пружины; 10 - шток; 11 - упор; 12 - золотник;
14 - сливное отверстие; 15 - винт; 16 - рукоятка
По принципу работы реле времени делятся на дроссельные и объемные.
На рис.7.28 дана схема реле времени дроссельного типа, предназначенного для отсекания давления от магистрали и включения слива с настроенной выдержкой времени.
Пружина 1 отводит золотник 2 в крайнее правое положение, вследствие чего масло из отверстия нагнетания 3 отводится в отверстие 4. Если реле включено, то масло через штуцер направляется в полость 5, затем канал 6 и щель между дросселем 7 и корпусом и, наконец, в полость 8 под торец золотника 2. Под давлением масла золотник 2 медленно перемещается влево, сжимая пружину 1. Как только золотник 2 займет крайнее левое положение, отверстие 4 соединяется со сливным отверстием 9. При выключении реле времени масло из полости 8 идет под шарик 10, сжимая пружину 11. Золотник возвращается в крайнее правое положение, направляя масло в отверстие 4. Время выдержки реле времени регулируется за счет вращения дросселя 7. Для этого требуется предварительно отвернуть колпачок 12 и ослабить контргайку 13.
При малых скоростях движения гидродвигателя, а также при значительном изменении температуры рабочей жидкости реле времени дроссельного типа не может дать точной выдержки времени. Поэтому в таких случаях применяют реле времени объемного типа.
На рис.7.29 дана конструктивная схема реле времени объемного типа.
Выдержка реле времени объемного типа зависит от продолжительности хода поршня 8 и регулируется винтом 15 при помощи рукоятки 16. Жидкость из гидросистемы подводится через отверстие 1 в полость 2 и к каналу 3, затем идет через отверстие 4, продольный канал 5 и в полость 6 и далее в полость 7. При этом опускается поршень 8, сжимая пружину 9, шток 10 поворачивает упор 11. Если даже давление в полости 2 возрастает, то золотник 12, сжимая пружину 13, поднимается вверх, вследствие чего произойдет соединение полости 7 со сливным отверстием 14. В свою очередь поршень 8 пружиной 9 поднимется верх, так как давление в полости 2 упадет, а золотник 12 опустится вниз, и вся система займет исходное первоначальное положение.
7.7. Средства измерения
В процессе эксплуатации гидроприводов применяют средства измерения, имеющие нормированные метрологические свойства и предназначенные для нахождения значений физических величин, характеризующих работу этих гидроприводов.
Применяемые средства измерения характеризуются ценой деления, абсолютной погрешностью и классом точности.
Цена деления шкалы - разность значений величин, соответствующих двум соседним отметкам шкалы прибора.
Абсолютная погрешность - разность между показанием прибора и истинным значением измеряемой величины.
Класс точности - обобщенная характеристика средств измерения, определяемая отношением максимально допустимой погрешности ? к конечному значению n шкалы прибора, выраженным в процентах, т.е.

При эксплуатации и испытаниях гидроприводов и отдельных гидроагрегатов измеряют давление, расход и температуру рабочей жидкости, скорость движения, усилия, крутящие моменты, развиваемые на выходных звеньях гидродвигателей.
Измерение давления. Для измерения избыточного давления применяют манометры. Манометры по своему назначению подразделяются на приборы общего назначения (типа М, МТ, ОБМ) и образцовые (типа МО). Рабочие манометры и общего назначения имеют класс точности 1; 1,5; 2,5 и 4. Образцовые манометры имеют более высокие класс точности (0,15; 0,25; 0,4), их применяют для поверки манометров общего назначения и в испытательных стендах.
По принципу действия манометры подразделяются на жидкостные, грузопоршневые, деформационные и электрические.
Жидкостные манометры применяют для измерений небольших давлений и чаще всего представляют собой стеклянную трубку, присоединенную к резервуару (рис.7.30).
| 
|
| Рис.7.30. Войлочный фильтр типа Г43: 1 - корпус; 2 - крышка; 3 - перфорированная труба; 4 - фильтрующие элементы | Рис.7.31. Магнитный фильтр типа С43-3: 1 - пробка; 2 - латунная шайба; 3 - корпус; 4 - шайба; 5 - прокладка; 6 - уплотнение; 7 - латунная труба; 8 - крышка; 9 - магниты |
Грузопоршневые манометры (рис.7.31), состоящие из цилиндра 1 и поршня 2, преобразуют давление рабочей жидкости в усилие, развиваемое поршнем.
Деформационные манометры получили в гидроприводе наибольшее распространение. Принцип их работы основан на зависимости деформации чувствительного элемента (мембраны, трубчатой пружины, сильфона) от измеряемого давления.

Рис.7.32. Деформационные манометры:
а - мембранный; б - мембранный с двойной мембраной;
в - с консольной балкой; г - сильфонный;
1 - мембрана; 2, 4 - активный и компенсирующий тензорезистор; 3 - консольная балочка
В мембранный манометрах давление со стороны рабочей жидкости передается на мембрану (рис.7.32, а, б, в). На мембране установлены тензорезисторы, которые изгибаясь вместе с мембраной изменяют свое электрическое сопротивление. Изменение сопротивления регистрируется электрическими приборами и преобразуется в показания значения соответствующего давления.
В сильфонных манометрах (рис.7.32, г) давление рабочей жидкости приводит к растяжению гофрированной упругой трубки пропорционально давлению.
Мембранный и сильфонные манометры предназначены для измерения небольших давлений.
Пружинный манометр (рис.7.33) имеет пружину в виде изогнутой латунной трубки (трубка Бурдона) 1 эллиптического поперечного сечения. Верхний конец трубки запаян, а нижний припаян к штуцеру 2, через который манометр присоединяется в гидросистему. При заполнении трубки рабочей средой под давлением она стремится выпрямиться. Через рычажный механизм 3, усиливающий деформацию трубки, перемещение ее свободного конца передается на стрелку 4, расположенную по центру шкалы прибора. Пружинные манометры просты по конструкции, ими можно измерять давление в широком диапазоне.
Рис.7.32. Деформационные манометры:
а - мембранный; б - мембранный с двойной мембраной;
в - с консольной балкой; г - сильфонный;
1 - мембрана; 2, 4 - активный и компенсирующий тензорезистор; 3 - консольная балочка
Шкала всех манометров градуируется в паскалях или мегапаскалях. На старых образцах давление указывается в кгс/см2. На шкале наносится заводское обозначение; класс точности; номер ГОСТ; год выпуска; номер манометра и название рабочей среды (жидкость, пар, газ), в которой измеряется давление.
Электрические манометры применяют для непрерывного измерения мгновенного значения давления в комплекте с осциллографами. Чувствительным элементом этих приборов может служить трубка Бурдона (рис.7.34, а) или тонкостенный полый стакан (рис.7.34, б) с наклеенными на их стенки тензодатчиками.
Датчики с манганиновой проволокой (рис.7.34, в), электрическое сопротивление которой меняется при объемном сжатии, применяются для замера давления.
Для замера пульсаций давления применяют пьезоэлектрические датчики (рис.7.34, г), регистрирующие только динамическую составляющую давления.

Рис.7.34. Электрические манометры:
а - с трубкой Бурдона; б - тонкостенный цилиндрический датчик с
наклеенными тензодатчиками; в - с манганиновой проволокой;
г - пьезоэлектрический; 1 - трубка Бурдона; 2 - тензодатчики;
3 - тонкостенный стакан; 4 - манганиновый датчик; 5 - узкая щель;
6 - корпус; 7 - заливка эпоксидной смолой;
8 - пьезоэлектрический датчик; 9 - перегородка
Измерение расхода. Для определения подачи рабочей жидкости используют расходомеры. По принципу действия различают расходомеры: счетчиковые, струйные, электромагнитные, ультразвуковые, тахометрические, а также основанные на перепаде давления и др.

Рис.7.35. Схемы расходомеров:
а - струйный; б - ультразвуковой; в - турбинный; г - тепловой;
1 - мембрана; 2 - неподвижный электрод; 3 - трубопровод;
4 - направляющая; 5 - корпус; 6 - подшипник; 7 - турбина; 8 - успокоитель;
9 - преобразователь сигнала; 10 - излучатель сигнала;
11 - дополнительный излучатель; 12 - приемник;
13 - дополнительный приемник; 14 - пластина;
15 - термопара; 16 - теплоизоляция; 17 - нагреватель
В струйных расходомерах (рис.7.35, а) на пути рабочей жидкости в трубопроводе 3 располагается некоторое препятствие типа плоской мембраны 1, отклонение которой является функцией скорости струи, а регистрирующий ток - функцией взаимного положения мембраны 3 и неподвижного электрода 2.
Тахометрические турбинные расходомеры (рис.7.35, в) работают с малогабаритными электронными преобразователями. В таком расходомере поток рабочей жидкости приводит во вращение турбину, каждый проход лопасти которой наводит импульс ЭДС в обмотке индукционного преобразователя. Скорость потока определяется через частоту электрических импульсов на выходе преобразователя путем как непосредственного измерения, так и выводом на цифровые приборы или преобразованием в аналоговый сигнал. Такими расходомерами можно измерять расходы до 360 л/мин.
Ультразвуковые расходомеры (рис.7.35, б) работают на основе ультразвуковых колебаний. Благодаря эффекту Доплера частота и фаза ультразвукового сигнала, проходящего от излучателя 11 к приемнику 13, будет изменяться в функции скорости протекания рабочей жидкости. Введение дополнительной пары излучатель 10 - приемник 12 обеспечивает компенсацию температурной нестабильности.
Тепловой неконтактный расходомер применяется для определения подачи насосом рабочей жидкости без разборки гидросистемы (рис.7.35, г). Он имеет стабилизированный источник питания (СИП), датчик и измерительный прибор (ИП). СИП обеспечивает питание нагревателя и ИП, включающий в себя дифференциальную термопару, позволяет определить скорость потока рабочей жидкости по разности температур входящего потока рабочей жидкости и нагревателя.
Измерение температуры. Температуру рабочей жидкости в гидроприводах измеряют термометрами, которые по принципу действия делятся на термометры расширения, сопротивления и теплоэлектрические. При диагностировании гидроприводов наибольшее распространение получили термометры расширения, имеющие границы измерений от -60 до +250 С.
Измерение крутящего момента на валах гидромашин определяют балансирными динамометрами или торсионометрами, первые из которых получили наибольшее распространение. Балансирные динамометры бывают электрические, тормозные, гидравлические и механические.
8. Гидравлические следящие приводы (гидроусилители)
8.1. Общие сведения
Гидроусилитель - совокупность гидроаппаратов и объемных гидродвигателей, в которой движение управляющего элемента преобразуется в движение управляемого элемента большей мощности, согласованное с движением управляющего элемента по скорости, направлению и перемещению.
Гидроусилитель следящего типа представляет собой силовой гидропривод, в котором исполнительный механизм (выход) воспроизводит (отслеживает) закон движения управляющего органа (входа), для чего в системе предусмотрена непрерывная связь между выходным и входным элементами, которая называется обратной связью.
Название такого привода - "следящий Гидроусилитель" или "следящий гидропривод" - обоснованы тем, что выход такого гидроусилителя автоматически устраняет через обратную связь возникающее рассогласование между управляющим воздействием (входным сигналом) и ответным действием (выходным сигналом).
Гидравлические следящие приводы нашли широкое применение в различных отраслях техники и в особенности в системах управл6ения современными транспортными машинами, включая автомашины, морские суда, самолеты и прочие летательные аппараты.
Блок-схема следящего привода (рис.8.1) состоит из следующих основных элементов:
задающего устройства ЗУ, которым формируется сигнал управления, пропорциональный требуемому перемещению исполнительного механизма (датчики, реагирующие на изменение условий работы или параметров технологического процесса);
сравнивающего устройства СУ, или датчика рассогласования, устанавливающего соответствие сигнала воспроизведения, поступающего от исполнительного механизма, сигналу управления;
усилителя У, которым производится усиление мощности сигнала управления за счет внешнего источника энергии ВИЭ;
исполнительного механизма ИМ, которым перемещается объект управления и воспроизводится программа, определяемая задающим устройством;
обратная связь ОС, которой исполнительных механизм соединен со сравнивающим устройством или с усилителем. Обратная связь является отличительным элементом следящего привода.
Рис.8.1. Блок-схема следящего привода
Величина x = f (t) (перемещение или скорость), сообщаемая задающим устройством сравнивающему устройству, называется "входом", а y = φ (t)(перемещение или скорость), воспроизведенная исполнительным механизмом, - "выходом". Разность (x - y) = ε называется ошибкой слежения или рассогласования системы.
Принцип работы следящего привода заключается в следующем. Изменение условий работы машины или параметров технологического процесса вызывает перемещение задающего устройства, которое создает рассогласование в системе. Сигнал рассогласования воздействует на усилитель, а через него и на исполнительный механизм. Вызванное этим сигналом перемещение исполнительного механизма через обратную связь устраняет рассогласование и приводит всю систему в исходное положение.
Рассмотрим работу следящего привода на примере принципиальной схемы рулевого управления автомобиля (рис.8.2).
Рис.8.2. Принципиальная схема следящего
рулевого привода автомобиля: 1 - насос (внешний источник энергии); 2 - втулка усилителя;
3 - обратная связь; 4 - исполнительный механизм;
5 - золотник усилителя; 6 - винт; 7 - рулевое колесо (задающее устройство)
При прямолинейном движении автомашины все элементы системы рулевого управления находятся в исходном положении. Жидкость из насоса 1 поступает к гидроусилителю золотникового типа. Золотник 5 усилителя занимает нейтральное положение, а в обеих полостях исполнительного механизма 4 установилось одинаковое давление. При необходимости изменить направление движения автомобиля водитель поворачивает рулевое колесо 7. Связанный с рулевым колесом винт 6 перемещает золотник усилителя на величину x, вызывая рассогласование в системе. При этом проходные сечения одних рабочих окон усилителя уменьшаются, а других увеличиваются. Это создает перепад давлений у исполнительного механизма, а его поршень приходит в движение, перемещаясь на величину y и поворачивая колеса автомобиля. Одновременно через обратную связь 3 движение поршня передается на втулку 2 усилителя. Совокупность 2 и 3 является сравнивающим устройством. Втулка перемещается в том же направлении, что и золотник 5 до тех пор, пока рассогласование в гидросистеме, вызванное поворотом рулевого колеса, не будет устранено. При непрерывном вращении водителем рулевого колеса поршень со штоком будет также непрерывно перемещаться, вызывая соответствующий поворот колес. При этом небольшие усилия водителя, прикладываемые к рулевому колесу, гидроприводом преобразуются в значительные усилия на штоке поршня, необходимые для управления автомобилем.
8.2. Классификация гидроусилителей
Применяемые в автоматизированных гидроприводах гидроусилители классифицируют по следующим признакам.
По методу управления различают гидроусилители без обратной связи и с обратной связью между управляющим элементом и ведомым звеном исполнительного механизма.
По конструкции управляющего элемента гидроусилители подразделяют на усилители с дросселирующими гидрораспределителями золотникового типа, с соплом и заслонкой, со струйной трубкой, крановые, с игольчатым дросселем.
По числу каскадов усиления гидроусилители подразделяют на одно-, двух- и многокаскадные. Многокаскадные применяют в тех случаях, когда требуется получить на выходе большую мощность и сохранить при этом высокую чувствительность гидроусилителя.
По виду сигнала управления гидроусилители подразделяют на усилители с механическим и электрическим сигналами управления.
Важными характеристиками усилителей являются коэффициенты усиления: по мощности kN, по расходу kQ, по скорости kυ и по давлению kP:

где Nвых, Nвх - мощности на ведомом звене исполнительного элемента гидроусилителя и мощность, затрачиваемая на его управление; δQ, δυ, δP - изменение расхода, скорости движения ведомого звена исполнительного элемента и давления жидкости на выходе при изменении положения управляющего элемента гидроусилителя на величину δx.
8.3. Гидроусилитель золотникового типа
Гидроусилители золотникового типа получили наибольшее распространение. Они просты по конструкции, разгружены от аксиальных статических сил давления жидкости, легко управляемы, имеют высокий КПД и обеспечивают достижение значительных коэффициентов усиления по мощности.
Схема следящего гидроусилителя золотникового типа с гидродвигателем прямолинейного движения и жесткой рычажной обратной связью представлена на рис.8.3.

Рис.8.3. Схем гидроусилителя золотникового типа с обратной связью:
1 - шарнир; 2 - тяга; 3 - золотник распределителя; 4 - поршень;
5 - корпус силового цилиндра; 6 - шарнир; 7 - дифференциальный рычаг
Этот гидроусилитель состоит в основном из тех же элементов что и рассмотренный выше усилитель рулевого привода автомобиля. При перемещении тяги 2, связанной с ручкой управления, перемещается шарнир 1 дифференциального рычага 7 обратной связи, с которым вязаны штоки силового цилиндра 5 и золотника распределителя 3. Так как силы, противодействующие смещению золотника распределителя, значительно меньше соответствующих сил, действующих в системе силового поршня 4, то шарнир 6 может рассматриваться в начале движения тяги 2 как неподвижный, ввиду чего движение его вызовет через рычаг 7 смещение плунжера золотника распределителя 3. В результате при смещении золотника из нейтрального положения, жидкость поступит в соответствующую полость цилиндра 5, что вызовет перемещение поршня 4, а следовательно, и шарнира 6, связанного с "выходом". При этом выходное звено сместится пропорционально перемещению тяги 2.
После того как движение тяги 2 будет прекращено, продолжающийся выдвигаться поршень 4 сообщит через рычаг 7 обратной связи плунжеру золотника распределителя 3 перемещение, противоположное тому, которое он получал до этого при смещении тяги 2 управления. Так как при этом расходные окна золотника будут в результате обратного движения плунжера постепенно прикрываться, количество жидкости, поступающей в цилиндр 5, уменьшится, вследствие чего скорость его поршня будет уменьшаться до тех пор, пока плунжер золотника не придет в положение, в котором окна полностью перекроются, при этом скорость станет равной нулю.
При перемещении плунжера золотника в противоположную строну движение всех элементов регулирующего устройства будет происходить в обратном направлении.
В действительности отдельных этапов движения "входа" и "выхода" рассматриваемого следящего привода с жесткой обратной связью не существует, и оба движения протекают практически одновременно, т.е. имеет место не ступенчатое, а непрерывное "слежение" исполнительным механизмом за перемещением "входа".
8.4. Гидроусилитель с соплом и заслонкой
Гидроусилитель с соплом и заслонкой (рис.8.4) состоит из управляющего элемента в виде нерегулируемого дросселя 1, междроссельной камеры 2, регулируемого дросселя, выполненного в виде сопла 3, заслонки 4 и задающего устройства 6, а также из исполнительного элемента 5.
Рис.8.4. Гидроусилитель с соплом и заслонкой:
1 - нерегулируемый дроссель; 2 - междроссельная камера; 3 - сопло;
4 - заслонка; 5 - исполнительный элемент; 6 - задающее устройство
Жидкость подается к гидроусилителю со стороны нерегулируемого дросселя. Из междроссельной камеры одна часть жидкости Q2 вытекает через щель, образованную торцом сопла и заслонкой, а другая Q1 поступает к исполнительному элементу. При изменении положения заслонки изменяются давление в междроссельной камере и расход через сопло. Одновременно изменяются усилие на исполнительный элемент, расход Q1 и скорость υ движения выходного звена. Нерегулируемый дроссель может быть выполнен в виде пакета тонких шайб с круглыми отверстиями.
Сопло гидроусилителя выполняется в виде цилиндрического насадка или в виде капиллярного канала. Увеличение диаметра сопла приводит к увеличению расхода и быстродействия системы. Заслонка имеет плоскую форму и перемещается от воздействия на нее сигнала управления.
Гидроусилитель типа сопло-заслонка отличается простотой конструкции, надежностью в работе и быстродействием. К нему можно подводить жидкость с большим давлением питания P0. В устройстве сопло-заслонка отсутствуют трущиеся пары, что обеспечивает его высокую чувствительность. Недостатком является непроизводительный расход жидкости через сопло, низкий КПД и невысокий коэффициент усиления по мощности.
8.5. Гидроусилитель со струйной трубкой
Гидроусилитель со струйной трубкой (рис.8.5) состоит из трубки 5 с коническим насадком на конце, сопловой головки 1 с двумя наклонными коническими расходящимися каналами и устройства управления. Устройство управления струйной трубкой состоит из задающего устройства 4 в виде регулируемой пружины, толкателя 6 и ограничителя 3 хода струйной трубки. Каналы сопловой головки соединены с исполнительным элементом 8 гидроусилителя. Жидкость с параметрами P0 и Q0 подается к трубке от источника питания. По трубе 2 жидкость отводится от гидроусилителя на слив.
Принцип работы гидроусилителя со струйной трубкой основан на преобразовании удельной потенциальной энергии давления в удельную кинетическую энергию струи, вытекающей из конического насадка, и последующем преобразовании этой энергии в удельную потенциальную энергию давления в каналах сопловой головки.
Гидроусилитель работает следующим образом. При отсутствии сигнала управления струйная трубка занимает нейтральное положение по отношению к отверстиям в сопловой головке. Вытекающая из насадка струя в одинаковой мере перерывает оба отверстия (рис.8.5, б), вследствие чего давления в каналах сопловой головки одинаковы, а выходное звено исполнительного элемента неподвижно. При подаче сигнала управления на толкатель струйная трубка смещается из нейтрального положения, равенство площадей отверстий, перекрытых струей, и равенство давлений в каналах сопловой головки нарушается. В результате выходное звено исполнительного элемента начинает перемещаться. При изменении знака сигнала управления выходное звено будет двигаться в другую сторону. Вытесняемая из исполнительного элемента жидкость попадает через канал в сопловой головке в полость 7 усилителя и далее на слив. Для того чтобы в каналы сопловой головки вместе с жидкостью не попал воздух, насадок струйной трубки делают погруженным в жидкость.

Рис.8.5. Гидроусилитель со струйной трубкой:
1 - сопловая головка; 2 - сливной трубопровод; 3 - ограничитель хода;
4 - задающее устройство; 5 - струйная трубка; 6 - толкатель;
7 - внутренняя полость; 8 - исполнительный элемент
8.6. Двухкаскадные усилители
Для повышения чувствительности усилителя и обеспечения одновременно увеличения мощности выходного сигнала применяют двухкаскадные устройства, первой ступенью усиления которых является обычно усилитель типа сопло- заслонка, а второй - золотник. Принципиальная схема такого устройства показана на рис.8.6. Междроссельная камера a этой схемы соединена с правой полостью основного распределительного золотника, плунжер 2 которого находится в равновесии под действием усилия пружины 4 и давления жидкости в этой камере. Жидкость постоянно подводится в штоковую полость b силового цилиндра, поршень которого при одновременной подаче жидкости в противоположную полость перемещается вследствие разности площадей поршня влево, и при соединении этой полости с баком - в правую сторону.

Рис.8.6. Двухкаскадный усилитель типа сопло-заслонка:
1 - заслонка; 2 - плунжер; 3 - силовой цилиндр; 4 - пружина
На рис.8.6. усилитель показана в нейтральном положении, в котором правая полость цилиндра 3 перекрыта. При смещении заслонки 1 равновесие сил, действующих на плунжер 2 золотника, нарушится, и он, смещаясь в соответствующую сторону, соединит правую полость силового цилиндра 3 либо с полостью питания (давление P Н), либо с баком. Благодаря тому, что усилие, создаваемое давлением жидкости на плунжер 2 золотника, уравновешивается пружиной 4, перемещение распределительного золотника будет пропорционально перемещению заслонки (регулируемого дросселя), в результате чего достигается приближенная пропорциональность расхода жидкости через золотник и перемещения заслонки. Следовательно, в данном случае имеет место обратная связь по давлению.
Рис.8.7. Двухступенчатая следящая система с обратной связью по давлению:
1 - пружина; 2 - плунжер; 3 - дроссель; 4 - клапан; 5 - заслонка
Схема применения этого распределительного устройства в следящей системе приведена на рис.8.7. Плунжер золотника 2 в этой схеме находится в равновесии под действием усилия пружины 1 и давления жидкости в камере a, которая соединена с линией питания через дроссель 3 и со сливом - через сверление b в штоке плунжера. Сопротивление последнего канала, а следовательно, и давление в камере a можно изменять смещением заслонки 5; при этом вследствие нарушения равновесия сил натяжения пружины и давления жидкости плунжер золотника будет следовать за заслонкой. Для повышения чувствительности давление в камере a обычно понижается с помощью клапана 4 или путем питания этой камеры от отдельного источника и, в частности, от сливной магистрали.
9. Системы разгрузки насосов и регулирования гидродвигателей
9.1. Способы разгрузки насосов от давления
В гидроприводах, в которых гидродвигатели работают непродолжительно, необходимо устраивать системы разгрузки насоса от давления. Благодаря этому уменьшаются эксплуатационные расходы, увеличивается КПД системы и повышается долговечность насоса.
Разгрузка через распределитель осуществляется путем соединения напорной линии насоса непосредственно через распределитель с баком. На рис.9.1, а показан момент разгрузки насоса при помощи трехпозиционного реверсивного распределителя с электромагнитным управлением. Разгрузка осуществляется при среднем положении плунжера за счет каналов, сделанных в плунжере золотника.
Разгрузка насоса с удержанием в гидромагистрали установившегося давления необходима для гидросистем машин с прижимом или зажимом деталей при их обработке (в станкостроении) или в гидросистемах, где продолжительное время должно поддерживаться высокое давление при отсутствии расхода. В таких случаях применяют гидроаккумуляторы. Данная система разгрузки насоса была уже рассмотрена в п.7.4 на рис.7.22. Рассмотрим еще один вариант разгрузки. На рис.9.1, б представлена гидросхема, где разгрузка насоса с удержанием давления в гидромагистрали осуществляется следующим образом. После прижима штоком поршня груза 1 к упору начинается зарядка гидроаккумулятора 2. В это же время жидкость под высоким давлением по линии управления 3 подводится к напорному клапану.
Когда давление достигнет значения, на которое настроен клапан 4, он откроется и соединит напорную линию с гидробаком. Насос разгрузится от высокого давления, при этом обратный клапан 5 блокирует магистраль от слива, а нужное давление поддерживается гидроаккумулятором 2. Гидроаккумулятор при этом компенсирует утечки рабочей жидкости в гидроаппаратуре и перетечки в гидродвигателе.

Рис.9.1. Принципиальные схемы разгрузки насоса
Разгрузка насоса в положении "стоп" исполнительного механизма применяют в станках, работающих по циклам: рабочий ход - "стоп" - реверс - холостой ход. В этом случае к гидроцилиндру и гидромагистрали необходимо подключить обратные клапаны (рис.9.1, в, г). При достижении поршнем крайнего правого положения (рис.9.1, в) насос разгружается по линии 1-2-3-4-5-6-7, а при достижении крайнего левого положения (рис.9.1, г) - по линии 1-2-6-8-9-3-7.
9.2. Дроссельное регулирование
Очень часто во многих рабочих процессах необходимо изменять скорости движения выходных звеньев гидродвигателей. Изменение скорости может осуществляться разными способами. Одним из них является дроссельное управление.
Дроссельный способ регулирования скорости гидропривода с нерегулируемым насосом основан на том, что часть жидкости, подаваемой насосом, отводится в сливную гидролинию и не совершает полезной работы. Простейшим регулятором скорости является регулируемый дроссель, который устанавливается в системе либо последовательно с гидродвигателем, либо в гидролинии управления параллельно гидродвигателю.
При параллельном включении дросселя (рис.9.2, а) рабочая жидкость, подаваемая насосом, разделяется на два потока. один поток проходит через гидродвигатель, другой - через регулируемый дроссель.
Скорость поршня для этой схемы определится выражением

где S - эффективная площадь поршня; QН - подача насоса; Sдр - площадь проходного сечения дросселя; μ - коэффициент расхода; FН - нагрузка на шток поршня; ρ - плотность жидкости.
В такой системе при постоянной внешней нагрузке FН = const, скорость движения будет изменяться от υ min до υmax при изменении Sдр от Sдр max до Sдр = 0. Поскольку в рассматриваемом гидроприводе давление на выходе насоса зависит от нагрузки PH = FH /S и не является постоянной величиной, такую систему называют системой с переменным давлением. Клапан, установленный в системе, является предохранительным. Эта система позволяет регулировать скорость только в том случае, если направление действия нагрузки противоположно направлению движения выходного звена гидропривода (отрицательная нагрузка).
Рис.9.2. Схемы гидроприводов с дроссельным управлением скоростью:
а - с параллельным включением дросселя; б - с дросселем на входе
гидродвигателя; в - с дросселем на выходе гидродвигателя;
г - с четырехлинейным дросселирующим распределителем
Последовательное включение дросселя осуществляется на входе в гидродвигатель, на выходе гидродвигателя, на входе и выходе гидродвигателя. При этом во всех трех случаях система регулирования скорости строится на принципе поддержания постоянного значения давления PH на выходе нерегулируемого насоса за счет слива части рабочей жидкости через переливной клапан. Поэтому система дроссельного регулирования с последовательным включением дросселей получила название система с постоянным давлением.
Гидропривод с дросселем на входе (рис.9.2, б) допускает регулирование скорости только при отрицательной нагрузке. При положительной нагрузке, направленной по движению поршня, может произойти разрыв сплошности потока рабочей жидкости, особенно при зарытом дросселе, когда поршень продолжает движение под действием сил инерции.
Скорость движения поршня в таком гидроприводе определяется выражением

Гидропривод с дросселем на выходе (рис.9.2, в) допускает регулирование скорости гидродвигателя при знакопеременной нагрузке, так как при любом направлении действия силы FН изменению скорости препятствует сопротивление дросселя, через который рабочая жидкость поступает из полости гидродвигателя на слив. Для такой схемы включения дросселя скорость движения выходного звена определится
При установке дросселя на выходе в случаях больших положительных нагрузок давление перед дросселем может превысить допустимый уровень. Поэтому для предохранения системы параллельно дросселю включают предохранительный клапан.
Недостатком дроссельного регулирования является то, что при регулировании часть энергии тратится на преодоление сопротивления в дросселе и предохранительном клапане, вследствие чего повышается температура жидкости, а это отрицательно сказывается на работе гидросистемы. При дроссельном регулировании снижается КПД гидропривода, и отсутствует постоянство скорости движения выходного звена гидродвигателя при переменной нагрузке.
9.3. Объемное регулирование
Для изменения скорости рабочих органов применяют системы, у которых вся жидкость от насосов поступает к гидродвигателю, а регулирование его скорости достигается изменением рабочего объема насоса или гидродвигателя.
Ступенчатой регулирование, являясь разновидностью объемного, обычно осуществляется или путем подключения в систему различных по производительности насосов (различных по расходу гидродвигателей).
Изменение скорости перемещения поршня гидроцилиндра (рис.9.3) осуществляется в результате соединения одного или нескольких насосов 1 с линией слива (при помощи кранов 2). Обратные клапаны 3 в системе отключают разгруженный насос от линии высокого давления.

Рис.9.3. Объемное ступенчатое регулирование
Подключение в гидросистему трех насосов разной производительности Q1, Q2 и Q3 позволяет получать до семи значений скоростей движения выходного звена гидродвигателя.
Плавное изменение скорости движения выходного звена гидропривода реализуется за счет изменения рабочего объема либо насоса, либо двигателя, либо за счет изменения рабочего объема обеих машин.
Регулирование путем изменения рабочего объема насоса может быть использовано в гидроприводах поступательного, поворотного или вращательного движений.
На рис.9.4, а приведена принципиальная схема гидропривода поступательного движения с замкнутой циркуляцией, в котором регулирование скорости движения штока гидроцилиндра 1 осуществляется за счет изменения подачи насоса 4. Выражение для скорости движения штока при FH /S < Pк записывается в виде

где qН - максимальный рабочий объем насоса; nН - частота вращения насоса; S - эффективная площадь поршня гидроцилиндра; rс - коэффициент объемных потерь системы, определяемый изменением объемного КПД насоса и гидродвигателя в функции давления (нагрузки); FН - нагрузка на шток поршня; Pк - давление, на которое отрегулированы предохранительные клапаны; eН - параметр регулирования насоса, равный отношению текущего значения рабочего объема к максимальному рабочему объему.
Изменение направления движения выходного звена гидропривода осуществляется благодаря реверсированию потока рабочей жидкости, подаваемой насосом (реверс подачи насоса). При этом необходимо вначале уменьшить подачу насоса до нуля, а затем увеличить ее, но в противоположном направлении. Напорная и сливная гидролинии меняются местами. Для компенсации утечек в гидроприводе с замкнутой циркуляцией, а также для исключения возможности кавитации на входе в насос используется вспомогательный насос 3, осуществляющий подачу рабочей жидкости в систему гидропривода через обратные клапаны 5.
При таком способе регулирования скорости усилие, развиваемое выходным звеном гидропривода, не зависит от скорости движения. В этом случае диапазон регулирования определяется объемным КПД гидропривода, а также максимальной подачей насоса, определяемый его рабочим объемом.
На рис.9.4, б представлена зависимость скорости движения и мощности на выходном звене гидропривода от параметра регулирования при постоянной нагрузке. Такая система объемного регулирования скорости получила наибольшее распространение в гидроприводах дорожно-строительных и подъемно-транспортных машин.
Рис.9.4. Гидропривод с регулируемым насосом:
а - принципиальная схема; б - зависимость скорости и давления
от параметра регулирования; 1 - гидроцилиндр; 2 - предохранительный клапан;
3 - вспомогательный насос; 4 - регулируемый насос; 5 - обратный клапан
Регулирование путем изменения рабочего объема гидродвигателя применяется только в гидроприводах вращательного движения, где в качестве гидродвигателя используется регулируемый гидромотор (рис.9.5, а). В этом случае регулирование происходит при постоянной мощности, так как уменьшение рабочего объема гидродвигателя увеличивает скорость выходного звена гидропривода и соответственно уменьшает крутящий момент, развиваемый на выходном звене. Частота вращения вала гидромотора nМ при P1 < Pк определяется соотношением
где qМ max - максимальный рабочий объем гидромотора; eМ - параметр регулирования гидромотора; P1 - давление в напорной гидролинии; rс - коэффициент объемных потерь (утечек) в системе.
Из выражения (9.5) следует, что при eМ → 0 nМ возрастает до бесконечности. Практически существует минимальное значение e'M, при котором момент, развиваемый гидромотором, становится равным моменту внутреннего трения, и гидромотор тормозится даже при моменте нагрузки, равном нулю (P1 = 0).
На рис.9.5, б представлена зависимость частоты вращения и развиваемого момента на валу гидромотора от параметра регулирования при постоянном давлении P1.
Рис.9.5. Гидропривод с регулируемым гидромотором:
а - принципиальная схема; б - зависимость скорости и давления
от параметра регулирования
Регулирование путем изменения рабочих объемов насоса и гидродвигателя используют только в гидроприводах вращательного движения с регулируемым гидромотором. Скорость выходного звена рационально регулировать следующим образом:
1) запустить приводной двигатель при eН = 0;
2) для страгивания и разгона выходного звена привода изменить eН от 0 до 1 при eМ = 1;
3) дальнейшее увеличение скорости осуществлять путем изменения eМ от 1 до e'M при eН = 1.
Уменьшение скорости происходит в обратном порядке. Такой способ позволяет получить большой диапазон регулирования, он обладает всеми достоинствами и недостатками выше рассмотренных схем объемного управления.
Рис.9.6. Гидропривод с регулируемым насосом и гидромотором
На рис.9.6 представлены принципиальная схема (а) и характеристика (б) гидропривода с замкнутой циркуляцией и регулируемым насосом и гидромотором.
9.4. Комбинированное регулирование
Комбинированное регулирование или объемно-дроссельное регулирование скорости движения выходного звена гидродвигателя заключается в том, что в систему дроссельного регулирования с постоянным давлением устанавливается регулируемый насос и давление поддерживается постоянным не за сет слива части рабочей жидкости через переливной клапан, а за счет изменения подачи насоса. В такой системе регулирования отсутствуют потери в переливном клапане.
На рис.9.7 представлена схема гидропривода поступательного движения с объемно-дроссельным управлением скоростью. Постоянное давление PН поддерживается путем совместной работы регулятора 1 и аксиально-поршневого регулируемого насоса 2. Изменение давления PН приводит к изменению положения поршня регулятора 1 и связанного с ним наклонного диска насоса 2. Изменение положения диска приводит к изменению подачи насоса Q.

Рис.9.7. Гидропривод с объемно-дроссельным управлением
скоростью выходного звена гидродвигателя
Поэтому в такой системе подача насоса всегда равна расходу через гидродвигатель и дроссель при PН = const.
9.5. Сравнение способов регулирования
Сравнительную оценку различных систем регулирования скорости гидроприводов целесообразно проводить по двум показателям: нагрузочной характеристике привода υ = f(FH) и КПД системы регулирования. На рис.9.8, а приведены нагрузочные характеристики, построенные для гидроприводов с одинаковой максимальной нагрузкой (1 - система с переменным давлением, 2 - система постоянным давлением, 3 - объемное управление).

Рис.9.8. Характеристики гидроприводов с различными
способами управления скоростью
Так как для управляемых гидроприводов наибольший интерес представляет не значение КПД на одном из режимов работы, а характер изменения КПД во всем диапазоне регулирования при различных нагрузках, то сравнение систем лучше всего проводить по характеристикам:

где  - отношение текущего значения скорости при данной нагрузке к максимальному значению скорости при той же нагрузке.
- отношение текущего значения скорости при данной нагрузке к максимальному значению скорости при той же нагрузке.
На рис.9.8, б приведены характеристики КПД систем регулирования (1 - параллельное включение дросселя; 2 - последовательное включение дросселя при оптимальной нагрузке; 3 - объемно-дроссельное управление при оптимальной нагрузке и объемное управление), а на рис.9.8, в - зависимости КПД системы регулирования от нагрузки при максимальной скорости движения выходного звена привода (1 - параллельное включение дросселя и объемное управление; 2 - объемно-дроссельное управление; 3 - последовательное включение дросселя).
Сравнение характеристик на рис.9.8 показывает, что гидропривод с объемным управлением имеет самую стабильную характеристику скорости во всем диапазоне изменения нагрузок и самый высокий КПД системы регулирования во всем диапазоне регулирования скорости.
Однако стоимость регулируемых гидромашин выше, чем нерегулируемых, и поэтому только в гидроприводах большой мощности (N > 10 кВт), где выигрыш в энергетике компенсирует увеличение стоимости, целесообразно использовать систему объемного управления. В приводах же небольшой мощности рационально использовать системы дроссельного регулирования, обеспечив при этом стабильность скорости при изменении нагрузки.
10. Системы типовых гидросистем
Гидросистема состоит из источника энергии, каковым обычно является насос, исполнительного механизма (силового цилиндра или гидромотора), а также аппаратуры управления потоком жидкости и защиты системы от перегрузок. В частности, обязательным аппаратом для большинства гидросистем является распределитель жидкости, в функции которого входит обеспечение направления потока жидкости к рабочим полостям исполнительного механизма.
Системы любой сложности комплектуются их элементарных систем и их комбинаций. Ввиду практической неограниченности возможных комбинаций таких элементарных систем, из которых комплектуются более сложные гидросистемы разнообразных машин и установок, ограничимся лишь описанием наиболее типовых элементов схем и их комбинаций, которые применяются практически во всех машинах.
10.1. Гидросистемы с регулируемым насосом и дросселем
На рис.10.1 изображена типовая схема гидросистемы с регулируемым насосом 3, приводимым во вращение электродвигателем М, с трехпозиционным четырехходовым распределителем 2 с ручным управлением, с помощью которого осуществляется реверс поршня силового цилиндра 1. В среднем положении распределителя 2 все его каналы соединяются с баком 5, что соответствует холостому ходу (разгрузке) насоса и "плавающему" состоянию поршня цилиндра. Насос 3 снабжен фильтром 4, установленным на всасывающем трубопроводе, и предохранительным клапаном 6.
На рис.10.2 представлена схема гидросистемы с регулируемым дросселем, установленным в линии подачи (на входе). В схеме предусмотрено соединение полостей цилиндра, для обеспечения чего применен утапливаемый с помощью упоров 4 на штоке цилиндра четырехходовой переключатель 5.
Система включает нерегулируемый насос 9 с предохранительным клапаном 7, трехпозиционный четырехходовой распределитель 6 с ручным управлением, регулируемый дроссель 2 и двухпозиционный переключатель 5 с приводом от упора 4 движущегося штока силового цилиндра 3 и с установкой в исходное (верхнее) положение под действием пружины.
В среднем положении распределителя 6, представленного на рис.10.2 все его каналы соединены между собой и с баком, что соответствует разгрузке насоса и "плаванию" поршня цилиндра.

| |
| Рис.10.1. Схема типовой гидросистемы с регулируемым насосом | Рис.10.2. Гидросистема с дроссельным управлением |
Положение распределителя в левой его позиции (жидкость поступает в перерывающиеся каналы правого поля распределителя) соответствует движению поршня силового цилиндра 3 вправо (жидкость от насоса поступает в левую полость), причем в этом положении распределителя 6 и утопленного переключателя 5 жидкость как от насоса, так и из нерабочей (правой) полости цилиндра 3 поступает в левую его полость (в этом случае рабочей площадью цилиндра является площадь сечения штока), что способствует ускоренному перемещению поршня вправо. После того, как нажатие упора 4 на переключатель 5 прекратится, он под действием пружины переместится вверх и отсечет левую полость цилиндра 3 от правой, соединив последнюю через распределитель с баком 8. В результате в левую полость цилиндра будет поступать лишь жидкость, проходящая через регулируемый дроссель 2, что соответствует регулируемому рабочему ходу поршня цилиндра 3.
При установке распределителя 6 в правое положение жидкость от насоса 9 поступает при неутопленном переключателе 5 в правую полость цилиндра 3, осуществляя обратный ход поршня. При этом жидкость, вытесняемая из левой полости цилиндра 3, поступает через дроссель 2 и обратный клапан 1 в бак.
При нажатии в этом случае на переключатель 5 канал насоса перекроется.
Рис.10.3. Гидросистема с цилиндром одностороннего действия
На рис.10.3, а представлена схема гидросистемы с силовым цилиндром 1 одностороннего действия и регулируемым насосом 4. Гидросистема упра-вляяется трехходовым двух-позиционным распределителем 2 с ручным приводом. Для предохранения от перегрузок система снабжена предохранительным клапаном 3.
В положении распределителя 2, представленном на рис.10.3, а, жидкость от насоса поступает в силовой цилиндр 1. Линия бака при этом перекрыта. При перемещении распределителя в противоположное положение выходной канал насоса 4 перекрывается, а цилиндр 1 соединяется с баком, в результате поршень цилиндра под действием веса приводимого узла опускается вниз. Скорость опускания регулируется с помощью дросселирования отводимой жидкости распределителем 2.
При применении в последней схеме трехходового трехпозиционного распределителя (рис.10.3, б) можно обеспечить в среднем его положении запирание жидкости в силовом цилиндре 1 (для удержания, например, груза в поднятом положении) при одновременном соединении насоса 4 с баком.
10.2. Гидросистемы с двухступенчатым усилением
В автоматических системах распространены двухступенчатые распределители, в которых задающее устройство воздействует на распределитель не напрямую, а через промежуточный вспомогательный распределитель (пилот), благодаря чему можно существенно снизить мощность сигнала.

| |
| Рис.10.4. Гидросистема с двухступенчатым (пилотным) распределением | Рис.10.5. Гидросистема с двухступенчатым (пилотным) распределением и ручной разгрузкой |
Схема гидросистемы с силовым цилиндром 1, снабженная подобным двухступенчатым распределителем, состоящим из основного 2 и вспомогательного 3 четырехходовых золотников, представлена на рис.10.4. Система снабжена регулируемым насосом 6, а также предохранительным 5 и обратным 4 клапанами. Основной трехпозиционный четырехходовой распределитель 2 с отрицательным перекрытием каналов (см. также рис.5.7) в среднем положении управляется давлением рабочей жидкости с помощью вспомогательного трехпозиционного четырехходового распределителя 3 с ручным или иным управлением. В среднем положении этого вспомогательного распределителя, представленном на рис.10.4, рабочие полости цилиндров сервопривода основного распределителя 2 соединены между собой с баком 7. В результате этот распределитель устанавливается под действием пружин в среднее положение, при котором все его каналы соединяются с баком, что соответствует разгрузке (переводу в режим холостого хода) насоса.
Схема аналогичной системы представлена на рис.10.5. Система снабжена нерегулируемым насосом 6 с ручной разгрузкой (переводом насоса на холостой ход), осуществляемой с помощью двухступенчатого двухходового распределителя (переключателя) 7. Реверсирование движения поршня силового цилиндра 1 осуществляется с помощью упоров, установленных на его штоке, воздействующих на четырехходовой двухпозиционный распределитель 5, обеспечивающий переключение (реверсирование) основного четырехходового двухпозиционного распределителя 3 скорость переключения распределителя 3 ограничена дросселями 2 и 4.
10.3. Гидросистемы непрерывного (колебательного) движения
В ряде случаев (в металлорежущих станках и пр.) требуется обеспечить непрерывные колебательные прямолинейные или поворотные движения исполнительного гидродвигателя.
Схема такой гидросистемы с гидродвигателем поворотного действия (моментным гидроцилиндром) 4 приведена на рис.10.6. Управление системой осуществляется автоматически действующим двухпозиционным распределителем 2 и разгрузочными клапанами последовательного включения 6 и 11 с управлением с помощью давления жидкости, перепускаемой предохранительными клапанами 5 и 7 в конце каждого хода поворотного поршня цилиндра.

Рис.10.6. Гидросистема, обеспечивающая поворотно-колебательные движения
В положении аппаратов системы, представленном на рис.10.6, жидкость от регулируемого насоса 1 поступает через двухпозиционный гидравлически управляемый распределитель 2 и напорную магистраль 3 в цилиндр 4 и удаляется из последнего в бак через магистраль 8. В конце каждого хода поршня поворотного цилиндра 4 клапан 7 в результате повышения давления перепускает жидкость в линию 10 управления распределителем 2 и клапаном 11, перемещая их рабочие элементы. При этом клапан 11 соединяет линию управления 9, связанную с верхней полостью распределителя 2, с баком, в результате чего распределитель 2 переключается, соединяя насос с магистралью 8, ведущей в противоположную полость цилиндра 4. При этом происходит реверс последнего, причем в конце хода цилиндра вступают в действие в той же последовательности предохранительный 5 и разгрузочный 6 клапаны, обеспечивающие повторение реверса поршня цилиндра.
Рассмотренная схема применима также и для поворотных колебательных движений цилиндра прямолинейного движения.
10.4. Электрогидравлические системы с регулируемым насосом
К гидросистемам с двухступенчатым электро-гидравлическим управлением относится система с регулируемым реверсивным насосом, реверс которого осуществляется сервоприводом, управляемым электрогидравлическим распределителем. Подобная схема гидросистемы с реверсивным регулируемым насосом 2 и гидравлически управлением производительностью по положению поршня 9 сервопривода представлена на рис.10.7.

Рис.10.7. Гидросистема с регулируемым реверсивным насосом
Система снабжена вспомогательным насосом 5, питающим систему регулирования (управления) подачи основного рабочего насоса, а также осуществляющим его подпитку. Сигнал на реверсирование подачи насоса 2 поступает от вспомогательного четырехходового трехпозиционного распределителя 3 с электромагнитным управлением, получающего электросигнал от концевых переключателей 10.
При реверсировании насоса 2 одновременно переключается двухпозиционный четырехходовой распределитель 4 с гидравлическим управлением на питание вспомогательным насосом 5 соответствующей всасывающей полости насоса 2.
Насос 2 снабжен предохранительными клапанами 7 и 8, отрегулированными на требуемые давления при прямом и обратном ходах поршня цилиндра 1, а насос 5 - предохранительным клапаном 6, отрегулированным на давление, необходимое для обеспечения требований системы управления и подпитки.
10.5. Гидросистемы с двумя спаренными насосами
В ряде машин, в частности в металлорежущих станках, распространены схемы с двумя спаренными насосами. Один из них (нерегулируемый) работает на низком давлении с большей подачей, и обеспечивает требующийся ускоренный холостой ход. А второй (регулируемый) работает на высоком давлении с небольшой подачей и служит для выполнения рабочего хода.

| |
| Рис.10.8. Схема системы с двумя спаренными насосами | Рис.10.9. Схемы гидросистем с двумя спаренными насосами и газовым гидроаккумулятором |
Упрощенная схема такой системы приведена на рис.10.8. Ускоренное перемещение поршня обеспечивается суммарной подачей двух насосов высокого 2 и низкого 3 давлений. По окончании ускоренного перемещения насос 3 вручную или автоматически по сигналу давления отключается при помощи открытия перекрывного крана 4, после чего питание цилиндра 1 обеспечивается одним насосом 2, который является регулируемым.
На рис.10.9, а показана принципиальная схема подобной гидросистемы питания потребителей двумя спаренными насосами 5 и 6 с автоматическим переключением. До тех пор, пока давление в линии 3 потребителей не достигнет заданного значения, на которое отрегулирована возвратная пружина двухходового распределителя (переключателя) 1, каналы последнего будут перекрыты, и в линию 3 поступает жидкость от обоих насосов. При заданном же давлении, определяемом характеристикой пружины переключателя 1, насос низкого давления 6 автоматически переключится на бак, насос же 5 с помощью обратного клапана 2 отсоединится от переключателя 1 и будет продолжать питание гидросистемы. Давление, развиваемое в этом случае насосом 5, ограничено предохранительным клапаном 4.
Принципиальная схема подобной же гидросистемы представлена на рис.10.9, б. Эта схема отключается от рассмотренной выше тем, что отключение насоса 6 низкого давления осуществляется электрогидравлическим реле давления 7, подающим при заданном давлении сигнал на электромагнитный переключатель 1.
10.6. Питание одним насосом двух и несколько гидродвигателей
Многие гидросистемы имеют несколько гидродвигателей, питаемые от одного насоса. При такой схеме возможны два варианта подключения гидродвигателей.
Гидросистема с параллельным включением гидропривода показана на рис.10.10. Гидросистема имеет одну общую насосную станцию 1 и три гидроцилиндра 2, 3 и 4. Каждый из гидроцилиндров имеет собственное независимое устройство управления - гидрораспределители 6, 7 и 8. В точке 5 гидролиния имеет разветвление, в котором общая подача насосной станции 1 делится на три части Q1, Q2 и Q3 . Каждый из гидроцилиндров может включаться в работу в любой момент времени, независимо от других потребителей, и совершать как холостой, так и рабочий ход.
Рис.10.10. Гидросистема параллельным включением гидропривода
Гидросистема с последовательным включением гидропривода представлена на ри.10.11. Гидросистема имеет два гидроцилиндра 1 и 2, которые питаются от общей насосной станции 3. В отличие от гидросистемы с параллельным включением, гидроцилиндр 2 может осуществлять рабочий ход только при неработающем первом гидроцилиндре, поскольку при включении гидроцилиндра 1, напорная линия цилиндра 2 становится сливной, в которой давление падает. При этом цилиндр 2 может осуществлять только холостой ход.
Гидросистемы с параллельным включением гидропривода получили наибольшее распространение. Однако, показанная на рис.10.10 гидросхема имеет один существенный недостаток.
Рис.10.11. Гидросистема последовательным включением гидропривода

Рис.10.12. Гидросистема с двумя гидроцилиндрами, питаемыми
одним наосом через редукционные клапаны
Дело в том, что при включении всех трех гидроцилиндров скорость перемещения их выходных звеньев будет минимальна. Если отключить один из них, например первый (2), то скорость у второго и третьего возрастет, так как общая подача будет делиться только на Q2 и Q3. Чтобы этого избежать, в гидросистему необходимо включать редукционные клапаны.
На рис.10.12 представлена схема гидросистемы с одним насосом 3 и двумя силовыми цилиндрами 1 и 6, один из которых (цилиндр 6) рассчитан на работу при внешней нагрузке (давлении), значительно меньшей нагрузки второго цилиндра 1.
Для снижения давления в системе питания цилиндра 6 до требуемой величины применен редукционный клапан 4, установленный на входе в распределитель 5. Для цилиндра 1 также предусмотрен редукционный клапан 7, отрегулированный на рабочее давление в этом цилиндре. Редукционный клапан 7 также устанавливается на входе в распределитель 8, управляющий цилиндром 1. Насос 3 снабжен переливным клапаном 2, который сбрасывает излишек рабочей жидкости в бак.
11. Пневматический привод
11.1. Общие сведения о применении газов в технике
Любой объект, в котором используется газообразное вещество, можно отнести к газовым системам. Поскольку наиболее доступным газом является воздух, состоящий из смеси множества газов, то его широкое применение для выполнения различных процессов обусловлено самой природой. В переводе с греческого pneumatikos - воздушный, чем и объясняется этимологическое происхождение названия пневматические системы. В технической литературе часто используется более краткий термин - пневматика.
Пневматические устройства начали применять еще в глубокой древности (ветряные двигатели, музыкальные инструменты, кузнечные меха и пр.), но самое широкое распространение они получили вследствие создания надежных источников пневматической энергии - нагнетателей, способных придавать газам необходимый запас потенциальной и (или) кинетической энергии.
Пневматический привод, состоящий из комплекса устройств для приведения в действие машин и механизмов, является далеко не единственным направлением использования воздуха (в общем случае газа) в технике и жизнедеятельности человека. В подтверждение этого положения кратко рассмотрим основные виды пневматических систем, отличающихся как по назначению, так и по способу использования газообразного вещества.
По наличию и причине движения газа все системы можно разделить на три группы.
К первой группе отнесем системы с естественной конвекцией (циркуляцией) газа (чаще всего воздуха), где движение и его направление обусловлено градиентами температуры и плотности природного характера, например, атмосферная оболочка планеты, вентиляционные системы помещений, горных выработок, газоходов и т.п.
Ко второй группе отнесем системы с замкнутыми камерами, не сообщающимися с атмосферой, в которых может изменяться состояние газа вследствие изменения температуры, объема камеры, наддува или отсасывания газа. К ним относятся различные аккумулирующие емкости (пневмобаллоны), пневматические тормозные устройства (пневмобуферы), всевозможные эластичные надувные устройства, пневмогидравлические системы топливных баков летательных аппаратов и многие другие. Примером устройств с использованием вакуума в замкнутой камере могут быть пневмозахваты (пневмоприсоски), которые наиболее эффективны для перемещения штучных листовых изделий (бумага, металл, пластмасса и т.п.) в условиях автоматизированного и роботизированного производства.
К третьей группе следует отнести такие системы, где используется энергия предварительно сжатого газа для выполнения различных работ. В таких системах газ перемещается по магистралям с относительно большой скоростью и обладает значительным запасом энергии. Они могут быть циркуляционными (замкнутыми) и бесциркуляционными. В циркуляционных системах отработавший газ возвращается по магистралям к нагнетателю для повторного использования (как в гидроприводе). Применение систем весьма специфично, например, когда недопустимы утечки газа в окружающее пространство или невозможно применение воздуха из-за его окислительных свойств. Примеры таких систем можно найти в криогенной технике, где в качестве энергоносителя используются агрессивные, токсичные газы или летучие жидкости (аммиак, пропан, сероводород, гелий, фреоны и др.).
В бесциркуляционных системах газ может быть использован потребителем как химический реагент (например, в сварочном производстве, в химической промышленности) или как источник пневматической энергии. В последнем случае в качестве энергоносителя обычно служит воздух. Выделяют три основных направления применения сжатого воздуха.
К первому направлению относятся технологические процессы, где воздух выполняет непосредственно операции обдувки, осушки, распыления, охлаждения, вентиляции, очистки и т.п. Очень широкое распространение получили системы пневмотранспортирования по трубопроводам, особенно в легкой, пищевой, горнодобывающей отраслях промышленности. Штучные и кусковые материалы транспортируются в специальных сосудах (капсулах), а пылевидные в смеси с воздухом перемещаются на относительно большие расстояния аналогично текучим веществам.
Второе направление - использование сжатого воздуха в пневматических системах управления (ПСУ) для автоматического управления технологическими процессами (системы пневмоавтоматики). Это направление получило интенсивное развитие с 60-х годов благодаря созданию универсальной системы элементов промышленной пневмоавтоматики (УСЭППА). Широкая номенклатура УСЭППА (пневматические датчики, переключатели, преобразователи, реле, логические элементы, усилители, струйные устройства, командоаппараты и т.д.) позволяет реализовать на ее базе релейные, аналоговые и аналого-релейные схемы, которые по своим параметрам близки к электротехническим системам. Благодаря высокой надежности они широко используются для циклового программного управления различными машинами, роботами в крупносерийном производстве, в системах управления движением мобильных объектов.
Третьим направлением применения пневмоэнергии, наиболее масштабным по мощности, является пневматический привод, который в научном плане является одним из разделов обшей механики машин. У истоков теории пневматических систем стоял И.И. Артоболевский. Он был руководителем Института машиноведения (ИМАШ) в Ленинграде, где под его руководством в 40 - 60-х годах систематизировались и обобщались накопленные сведения по теории и проектированию пневмосистем. Одной из первых работ по теории пневмосистем была статья А.П. Германа "Применение сжатого воздуха в горном деле", опубликованная в 1933 г., где впервые движение рабочего органа пневмоустройства решается совместно с термодинамическим уравнением состояния параметров воздуха.
Значительный вклад в теорию и практику пневмоприводов внесли ученые Б.Н. Бежанов, К.С. Борисенко, И.А. Бухарин, А.И. Вощинин, Е.В. Герц, Г.В. Крейнии, А.И. Кудрявцев, В.А. Марутов, В.И. Мостков, Ю.А. Цейтлин и другие.
11.2. Особенности пневматического привода, достоинства и недостатки
Область и масштабы применения пневматического привода обусловлены его достоинствами и недостатками, вытекающими из особенностей свойств воздуха. В отличие от жидкостей, применяемых в гидроприводах, воздух, как и все газы, обладает высокой сжимаемостью и малой плотностью в исходном атмосферном состоянии (около 1,25 кг/м 3), значительно меньшей вязкостью и большей текучестью, причем его вязкость существенно возрастает при повышении температуры и давления. Отсутствие смазочных свойств воздуха и наличие некоторого количества водяного пара, который при интенсивных термодинамических процессах в изменяющихся объемах рабочих камер пневмомашин может конденсироваться на их рабочих поверхностях, препятствует использованию воздуха без придания ему дополнительных смазочных свойств и влагопонижения. В связи с этим в пневмоприводах имеется потребность кондиционирования воздуха, т.е. придания ему свойств, обеспечивающих работоспособность и продляющих срок службы элементов привода.
С учетом вышеописанных отличительных особенностей воздуха рассмотрим достоинства пневмопривода в сравнении с его конкурентами - гидро- и электроприводом.
1. Простота конструкции и технического обслуживания. Изготовление деталей пневмомашин и пневмоаппаратов не требует такой высокой точности изготовления и герметизации соединений, как в гидроприводе, т.к. возможные утечки воздуха не столь существенно снижают эффективность работы и КПД системы. Внешние утечки воздуха экологически безвредны и относительно легко устраняются. Затраты на монтаж и обслуживание пневмопривода несколько меньше из-за отсутствия возвратных пневмолиний и применения в ряде случаев более гибких и дешевых пластмассовых или резиновых (резинотканевых) труб. В этом отношении пневмопривод не уступает электроприводу. Кроме того, пневмопривод не требует специальных материалов для изготовления деталей, таких как медь, алюминий и т.п., хотя в ряде случаев они используются исключительно для снижения веса или трения в подвижных элементах.
2. Пожаро- и взрывобезопасность. Благодаря этому достоинству пневмопривод не имеет конкурентов для механизации работ в условиях, опасных по воспламенению и взрыву газа и пыли, например в шахтах с обильным выделением метана, в некоторых химических производствах, на мукомольных предприятиях, т.е. там, где недопустимо искрообразование. Применение гидропривода в этих условиях возможно только при наличии централизованного источника питания с передачей гидроэнергии на относительно большое расстояние, что в большинстве случаев экономически нецелесообразно.
3. Надежность работы в широком диапазоне температур, в условиях пыльной и влажной окружающей среды. В таких условиях гидро- и электропривод требуют значительно больших затрат на эксплуатацию, т.к. при температурных перепадах нарушается герметичность гидросистем из-за изменения зазоров и изолирующих свойств электротехнических материалов, что в совокупности с пыльной, влажной и нередко агрессивной окружающей средой приводит к частым отказам. По этой причине пневмопривод является единственным надежным источником энергии для механизации работ в литейном и сварочном производстве, в кузнечно-прессовых цехах, в некоторых производствах по добыче и переработке сырья и др. Благодаря высокой надежности пневмопривод часто используется в тормозных системах мобильных и стационарных машин.
4. Значительно больший срок службы, чем гидро- и электропривода. Срок службы оценивают двумя показателями надежности: гамма-процентной наработкой на отказ и гамма-процентным ресурсом. Для пневматических устройств циклического действия ресурс составляет от 5 до 20 млн. циклов в зависимости от назначения и конструкции, а для устройств нециклического действия около 10-20 тыс. часов. Это в 2 - 4 раза больше, чем у гидропривода, и в 10-20 раз больше, чем у электропривода.
5. Высокое быстродействие. Здесь имеется в виду не скорость передачи сигнала (управляющего воздействия), а реализуемые скорости рабочих движений, обеспечиваемых высокими скоростями движения воздуха. Поступательное движение штока пневмоцилиндра возможно до 15 м/с и более, а частота вращения выходного вала некоторых пневмомоторов (пневмотурбин) до 100 000 об/мин. Это достоинство в полной мере реализуется в приводах циклического действия, особенно для высокопроизводительного оборудования, например в манипуляторах, прессах, машинах точечной сварки, в тормозных и фиксирующих устройствах, причем увеличение количества одновременно срабатывающих пневмоцилиндров (например в многоместных приспособлениях для зажима деталей) практически не снижает время срабатывания. Большая скорость вращательного движения используется в приводах сепараторов, центрифуг, шлифовальных машин, бормашин и др. Реализация больших скоростей в гидроприводе и электроприводе ограничивается их большей инерционностью (масса жидкости и инерция роторов) и отсутствием демпфирующего эффекта, которым обладает воздух.
6. Возможность передачи пневмоэнергии на относительно большие расстояния по магистральным трубопроводам и снабжение сжатым воздухом многих потребителей. В этом отношении пневмопривод уступает электроприводу, но значительно превосходит гидропривод, благодаря меньшим потерям напора в протяженных магистральных линиях. Электрическая энергия может передаваться по линиям электропередач на многие сотни и тысячи километров без ощутимых потерь, а расстояние передачи пневмоэнергии экономически целесообразно до нескольких десятков километров, что реализуется в пневмосистемах крупных горных и промышленных предприятий с централизованным питанием от компрессорной станции.
Известен опыт создания городской компрессорной станции в 1888 г. одним из промышленников в Париже. Она снабжала заводы и фабрики по магистралям протяженностью 48 км при давлении 0,6 МПа и имела мощность до 18500 кВт. С появлением надежных электропередач ее эксплуатация стала невыгодной.
Максимальная протяженность гидросистем составляет около 250-300 м в механизированных комплексах шахт для добычи угля, причем в них используется обычно менее вязкая водно-масляная эмульсия.
7. Отсутствие необходимости в защитных устройствах от перегрузки давлением у потребителей. Требуемый предел давления воздуха устанавливается общим предохранительным клапаном, находящимся на источниках пневмоэнергии. Пневмодвигатели могут быть полностью заторможены без опасности повреждения и находиться в этом состоянии длительное время.
8. Безопасность для обслуживающего персонала при соблюдении общих правил, исключающих механический травматизм. В гидро- и электроприводах возможно поражение электрическим током или жидкостью при нарушении изоляции или разгерметизации трубопроводов.
9. Улучшение проветривания рабочего пространства за счет отработанного воздуха. Это свойство особенно полезно в горных выработках и помещениях химических и металлообрабатывающих производств.
10. Нечувствительность к радиационному и электромагнитному излучению. В таких условиях электрогидравлические системы практически непригодны. Это достоинство широко используется в системах управления космической, военной техникой, в атомных реакторах и т.п.
Несмотря на вышеописанные достоинства, применяемость пневмопривода ограничивается в основном экономическими соображениями из-за больших потерь энергии в компрессорах и пневмодвигателях, а также других недостатков, описанных ниже.
1. Высокая стоимость пневмоэнергии. Если гидро- и электропривод имеют КПД, соответственно, около 70 % и 90 %, то КПД пневмопривода обычно 5-15 % и очень редко до 30 %. Во многих случаях КПД может быть 1 % и менее. По этой причине пневмопривод не применяется в машинах с длительным режимом работы и большой мощности, кроме условий, исключающих применение электроэнергии (например, горнодобывающие машины в шахтах, опасных по газу).
2. Относительно большой вес и габариты пневмомашин из-за низкого рабочего давления. Если удельный вес гидромашин, приходящийся на единицу мощности, в 5-10 раз меньше веса электромашин, то пневмомашины имеют примерно такой же вес и габариты, как последние.
3. Трудность обеспечения стабильной скорости движения выходного звена при переменной внешней нагрузке и его фиксации в промежуточном положении. Вместе с тем мягкие механические характеристики пневмопривода в некоторых случаях являются и его достоинством.
4. Высокий уровень шума, достигающий 95-130 дБ при отсутствии средств для его снижения. Наиболее шумными являются поршневые компрессоры и пневмодвигатели, особенно пневмомолоты и другие механизмы ударно- циклического действия. Наиболее шумные гидроприводы (к ним относятся приводы с шестеренными машинами) создают шум на уровне 85-104 дБ, а обычно уровень шума значительно ниже, примерно как у электромашин, что позволяет работать без специальных средств шумопонижения.
5. Малая скорость передачи сигнала (управляющего импульса), что приводит к запаздыванию выполнения операций. Скорость прохождения сигнала равна скорости звука и, в зависимости от давления воздуха, составляет примерно от 150 до 360 м/с. В гидроприводе и электроприводе, соответственно, около 1000 и 300 000 м/с.
Перечисленные недостатки могут быть устранены применением комбинированных пневмоэлектрических или пневмогидравлических приводов.
11.3. Течение воздуха
Инженерные расчеты пневмосистем сводятся к определению скоростей и расходов воздуха при наполнении и опорожнении резервуаров (рабочих камер двигателей), а также с его течением по трубопроводам через местные сопротивления. Вследствие сжимаемости воздуха эти расчеты значительно сложнее, чем расчеты гидравлических систем, и в полной мере выполняются только для особо ответственных случаев. Полное описание процессов течения воздуха можно найти в специальных курсах газодинамики.
Основные закономерности течения воздуха (газа) такие же, как и для жидкостей, т.е. имеют место ламинарный и турбулентный режимы течения, установившийся и неустановившийся характер течения, равномерное и неравномерное течение из-за переменного сечения трубопровода и все остальные кинематические и динамические характеристики потоков. Вследствие низкой вязкости воздуха и относительно больших скоростей режим течения в большинстве случаев турбулентный.
Для промышленных пневмоприводов достаточно знать закономерности установившегося характера течения воздуха. В зависимости от интенсивности теплообмена с окружающей средой расчеты параметров воздуха выполняются с учетом вида термодинамического процесса, который может быть от изотермического (с полным теплообменом и выполнением условия Т = const) до адиабатического (без теплообмена).
При больших скоростях исполнительных механизмов и течении газа через сопротивления процесс сжатия считается адиабатическим с показателем адиабаты k = 1,4. В практических расчетах показатель адиабаты заменяют на показатель политропы (обычно принимают n = 1,3…1,35), что позволяет учесть потери, обусловленные трением воздуха, и возможный теплообмен.
В реальных условиях неизбежно происходит некоторый теплообмен между воздухом и деталями системы и имеет место так называемое политропное изменение состояния воздуха. Весь диапазон реальных процессов описывается уравнениями этого состояния
pVn = const
где n - показатель политропы, изменяющийся в пределах от n = 1 (изотермический процесс) до n = 1,4 (адиабатический процесс).
В основу расчетов течения воздуха положено известное уравнение Бернулли движения идеального газа
Слагаемые уравнения выражаются в единицах давления, поэтому их часто называют "давлениями":
z - весовое давление;
p - статическое давление;
 - скоростное или динамическое давление.
- скоростное или динамическое давление.
На практике часто весовым давлением пренебрегают и уравнение Бернулли принимает следующий вид
Сумму статического и динамического давлений называют полным давлением P0. Таким образом, получим

При расчете газовых систем необходимо иметь в виду два принципиальных отличия от расчета гидросистем.
Первое отличие заключается в том, что определяется не объемный расход воздуха, а массовый. Это позволяет унифицировать и сравнивать параметры различных элементов пневмосистем по стандартному воздуху (ρ = 1,25 кг/ м3, υ = 14,9 м2/с при p = 101,3 кПа и t = 20°C). В этом случае уравнение расходов записывается в виде
Qм1 = Qм2 или υ1V1S1 = υ2V2S2
Второе отличие заключается в том, что при сверхзвуковых скоростях течения воздуха изменяется характер зависимости расхода от перепада давлений на сопротивлении. В связи с этим существуют понятия подкритического и надкритического режимов течения воздуха. Смысл этих терминов поясняется ниже.
Рассмотри истечение газа из резервуара через небольшое отверстие при поддержании в резервуаре постоянного давления (рис.11.1). Будем считать, что размеры резервуара настолько велики по сравнению с размерами выходного отверстия, что можно полностью пренебрегать скоростью движения газа внутри резервуара, и, следовательно, давление, температура и плотность газа внутри резервуара будут иметь значения p0, ρ 0 и T0.

Рис.11.1. Истечение газа из отверстия в тонкой стенке
Скорость истечения газа можно определять по формуле для истечения несжимаемой жидкости, т.е.

Массовый расход газа, вытекающего через отверстие, определяем по формуле

где ω0 - площадь сечения отверстия.
Отношение p/p0 называется степенью расширения газа. Анализ формулы (11.7) показывает, что выражение, стоящее под корнем в квадратных скобках, обращается в ноль при p/p0 = 1 и p/ p0 = 0. Это означает, что при некотором значении отношения давлений массовый расход достигает максимума Qmax. График зависимости массового расхода газа от отношения давлений p/p0 показан на рис.11.2.
Рис.11.2. Зависимость массового расхода газа от отношения давлений
Отношение давлений p/p0, при котором массовый расход достигает максимального значения, называется критическим. Можно показать, что критическое отношение давлений равно

Как видно из графика, показанного на рис.11.2, при уменьшении p/p0 по сравнению с критическим расход должен уменьшаться (пунктирная линия) и при p/p0 = 0 значение расхода должно быть равно нулю (Qm = 0). Однако в действительности это не происходит.
В действительности при заданных параметрах p0, ρ0 и T0 расход и скорость истечения будут расти с уменьшением давления вне резервуара p до тех пор, пока это давление меньше критического. При достижении давлением p критического значения расход становится максимальным, а скорость истечения достигает критического значения, равного местной скорости звука. Критическая скорость определяется известной формулой

После того, как на выходе из отверстия скорость достигла скорости звука, дальнейшее уменьшение противодавления p не может привести к увеличению скорости истечения, так как, согласно теории распространения малых возмущений, внутренний объем резервуара станет недоступен для внешних возмущений: он будет "заперт" потоком со звуковой скоростью. Все внешние малые возмущения не могут проникнуть в резервуар, так как им будет препятствовать поток, имеющий ту же скорость, что и скорость распространения возмущений. При этом расход не будет меняться, оставаясь максимальным, а кривая расхода примет вид горизонтальной линии.
Таким образом, существует две зоны (области) течения:
подкритический режим, при котором

надкритический режим, при котором

В надкритической зоне имеет место максимальная скорость и расход, соответствующие критическому расширению газа. Исходя из этого при определении расходов воздуха предварительно определяют по перепаду давления режим истечения (зону), а затем расход. Потери на трение воздуха учитывают коэффициентом расхода μ, который с достаточной точностью можно вычислить по формулам для несжимаемой жидкости (μ = 0,1...0,6).
Окончательно скорость и максимальный массовый расход в подкритической зоне, с учетом сжатия струи определятся по формулам
11.4. Подготовка сжатого воздуха
В промышленности используются различные конструкции машин для подачи воздуха под общим названием воздуходувки. При создании избыточного давления до 0,015 МПа они называются вентиляторами, а при давлении свыше 0,115 МПа - компрессорами.
Вентиляторы относятся к лопастным машинам динамического действия и кроме своего основного назначения - проветривания - применяются в пневмотранспортных системах и низконапорных системах пневмоавтоматики.
В пневмоприводах источником энергии служат компрессоры с рабочим давлением в диапазоне 0,4…1,0 МПа. Они могут быть объемного (чаще поршневые) или динамического (лопастные) действия. Теория работы компрессоров изучается в специальных дисциплинах.
По виду источника и способу доставки пневмоэнергии различают магистральный, компрессорный и аккумуляторный пневмопривод.
Магистральный пневмопривод характеризуется разветвленной сетью стационарных пневмолиний, соединяющих компрессорную станцию с цеховыми, участковыми потребителями в пределах одного или нескольких предприятий. Компрессорная станция оборудуется несколькими компрессорными линиями, обеспечивающими гарантированное снабжение потребителей сжатого воздуха с учетом возможной неравномерной работы последних. Это достигается установкой промежуточных накопителей пневмоэнергии (ресиверов) как на самой станции, так и на участках. Пневмолинии обычно резервируются, чем обеспечивается удобство их обслуживания и ремонта. Типовой комплект устройств, входящих в систему подготовки воздуха, показан на принципиальной схеме компрессорной станции (рис.11.3).
Рис.11.3. Принципиальная схема компрессорной станции
Компрессор 2 с приводным двигателем 3 всасывает воздух из атмосферы через заборный фильтр 1 и нагнетает в ресивер 7 через обратный клапан 4, охладитель 5 и фильтр-влагоотделитель 6. В результате охлаждения воздуха водяным охладителем 5 происходит конденсация 70-80 % содержащейся в воздухе влаги, улавливаемой фильтром- влагоотделителем и со 100-процентной относительной влажностью воздух поступает в ресивер 7, который аккумулирует пневмоэнергию и сглаживает пульсацию давления. В нем происходит дальнейшее охлаждение воздуха и конденсация некоторого количества влаги, которая по мере накопления удаляется вместе с механическими примесями через вентиль 10. Ресивер обязательно оборудуется одним или несколькими предохранительными клапанами 8 и манометром 9. Из ресивера воздух отводится к пневмолиниям 12 через краны 11. Обратный клапан 4 исключает возможность резкого падения давления в пневмосети при отключении компрессора.
Компрессорный пневмопривод отличается от вышеописанного магистрального своей мобильностью и ограниченностью числа одновременно работающих потребителей. Передвижные компрессоры наиболее широко используются при выполнении различных видов строительных и ремонтных работ. По комплекту устройств, входящих в систему подготовки воздуха, он практически не отличается от вышеописанной компрессорной станции (водяной охладитель заменяется на воздушный). Подача воздуха к потребителям осуществляется через резинотканевые рукава.
Аккумуляторный пневмопривод ввиду ограниченного запаса сжатого воздуха в промышленности применяется редко, но широко используется в автономных системах управления механизмов с заданным временем действия. На рис.11.4 показаны несколько примеров аккумуляторного питания пневмосистем.
Для бесперебойной подачи жидкости в гидросистему или топлива в двигатели внутреннего сгорания аппаратов с переменной ориентацией в пространстве применяется наддув бака с жидкостью (рис.11.4, а) от пневмобаллона 1.
Вытеснение жидкости из бака 5, разделенного мембраной на две части, обеспечивается постоянным давлением воздуха, зависящим от настройки редукционного клапана 3 при включении электровентиля 2. Предельное давление ограничивается клапаном 4.
Система ориентации летательного аппарата (рис.11.4, б) состоит из управляющих реактивных пневмодвигателей 4, питающихся от шарового пневмобаллона 1 через редукционный клапан 2 и электровентили 3.
Рис.11.4. Принципиальные схемы аккумуляторного питания
пневмосистем (а, б, в) и замкнутой пневмосистемы (г)
Для питания систем промышленной пневмоавтоматики часто используется не только средний (нормальный) диапазон давления воздуха (0,118…0,175 МПа), а и низкий диапазон (0,0012…0,005 МПа). Это позволяет уменьшить расход сжатого воздуха, увеличить проходное сечение элементов и, следовательно, снизить вероятность засорения дросселирующих устройств, а в некоторых случаях получить ламинарный режим течения воздуха с линейной зависимостью Q = f(Δp), что весьма важно в устройствах пневмоавтоматики.
При наличии источника высокого давления можно обеспечить питание пневмосистемы низкого давления с большим расходом воздуха при помощи эжектора (рис.11.4, в). От пневмобаллона высокого давления 1, оборудованного редукционным клапаном 4, манометром 2 и зарядным клапаном 3 воздух поступает на питающее сопло 5 эжектора. При этом внутри корпуса эжектора создается пониженное давление, и из окружающей среды через фильтр 6 подсасывается воздух, который поступает в приемное сопло 7 большего диаметра. После эжектора воздух вторично очищается от пыли фильтром 8 и поступает к устройствам 10 пневмоавтоматики. Манометром 9 контролируется рабочее давление, величина которого может корректироваться редуктором 4.
Все вышеописанные пневмосистемы относятся к разомкнутым (бесциркуляционным). На рис.11.4, г показана замкнутая схема питания системы пневмоавтоматики, используемая в условиях пыльной атмосферы. Подача воздуха к блоку пневмоавтоматики 3 осуществляется вентилятором 1 через фильтр 2, причем всасывающий канал вентилятора соединен с внутренней полостью герметичного кожуха блока 3, которая одновременно через фильтр тонкой очистки 4 сообщается с атмосферой. Часто в качестве вентилятора используются бытовые электропылесосы, способные создавать давление до 0,002 МПа.
Воздух, поступающий к потребителям, должен быть очищен от механических загрязнений и содержать минимум влаги. Для этого служат фильтры-влагоотделители, у которых в качестве фильтрующего элемента обычно используется ткань, картон, войлок, металлокерамика и другие пористые материалы с тонкостью фильтрации от 5 до 60 мкм. Для более глубокой осушки воздуха его пропускают через адсорбенты, поглощающие влагу. Чаще всего для этого используется силикагель. В обычных пневмоприводах достаточную осушку обеспечивают ресиверы и фильтры- влагоотделители, но вместе с тем воздуху необходимо придавать смазочные свойства, для чего служат маслораспылители фитильного или эжекторного типа.
Рис.11.5. Типовой узел подготовки воздуха:
а - принципиальная схема; б - условное обозначение
На рис.11.5 показан типовой узел подготовки воздуха, состоящий из фильтра-влагоотделителя 1, редукционного клапана 2 и маслораспылителя 3.
Поступающий на вход фильтра воздух получает вращательное движение за счет неподвижной крыльчатки Kр. Центробежной силой частицы влаги и механических примесей отбрасываются к стенке прозрачного корпуса и оседают в его нижнюю часть, откуда по мере необходимости удаляются через сливной кран. Вторичная очистка воздуха происходит в пористом фильтре Ф, после которого он поступает на вход редуктора, где происходит дросселирование через зазор клапана Кл, величина которого зависит от выходного давления над мембраной М. Увеличение усилия сжатия пружины П обеспечивает увеличение зазора клапана Кл и, следовательно, выходного давления. Корпус маслораспылителя 3 делается прозрачным и заполняется через пробку смазочным маслом. Создаваемое на поверхности масла давление вытесняет его через трубку T вверх к соплу С, где масло эжектируется и распыляется потоком воздуха. В маслораспылителях фитильного типа вместо трубки Т установлен фитиль, по которому масло поступает в распылительное сопло за счет капиллярного эффекта.
11.5. Исполнительные пневматические устройства
Исполнительными устройствами пневмоприводов называются различные механизмы, обеспечивающие преобразование избыточного давления воздуха или вакуума в рабочее усилие. Если при этом рабочий орган совершает движение относительно пневмоустройства, то он называется пневмодвигателем, а если движения нет или оно происходит совместно с пневмоустройством, то оно называется пневмоприжимом или пневмозахватом.
Пневмодвигатели могут быть, как и гидродвигатели, вращательного или поступательного действия и называются, соответственно, пневмомоторами и пневмоцилиндрами. Конструктивное исполнение этих устройств во многом похоже на их гидравлические аналоги. Наибольшее применение получили шестеренные, пластинчатые и радиально-поршневые пневмомоторы объемного действия. На рис.11.6, а показана схема радиально- поршневого мотора с передачей крутящего момента на вал через кривошипно-шатунный механизм.
В корпусе 1 симметрично расположены цилиндры 2 с поршнями 3. Усилие от поршней передается на коленчатый вал 5 через шатуны 4, прикрепленные шарнирно к поршням и кривошипу коленчатого вала. Сжатый воздух подводится к рабочим камерам по каналам 8, которые поочередно сообщаются с впускным Вп и выхлопным Вх каналами распределительного золотника 6, вращающегося синхронно с валом мотора. Золотник вращается в корпусе распределительного устройства 7, к которому подведены магистрали впуска и выхлопа воздуха.
Радиально-поршневые пневмомоторы являются относительно тихоходными машинами с частотой вращения вала до 1000…1500 об/мин. Более быстроходны шестеренные и пластинчатые моторы (2000…4000 об/мин), но самыми быстроходными (до 20000 об/мин и более) могут быть турбинные пневмомоторы, в которых используется кинетическая энергия потока сжатого воздуха. В частности, такие моторы используются для вращения рабочих колес вентиляторов на горных предприятиях.
Рис.11.6. Схемы пневмомоторов объемного (а) и динамического (б) действия
На рис.11.6, б показана схема пневмопривода колеса вентилятора, состоящего из ступицы 9 с лопаток 10, к которым жестко прикреплен вращающийся обод с лопатками пневмомотора 11. Поток сжатого воздуха, вытекающий из сопла 12 по касательной к изогнутым лопаткам 11, отдает свою энергию и заставляет вращаться колесо вентилятора с большой скоростью. Описанное устройство можно назвать пневмопреобразователем, преобразующим поток воздуха высокого давления в поток низкого давления с гораздо большим расходом.
Пневмопривод отличается большим разнообразием оригинальных исполнительных устройств с эластичными элементами в форме мембран, оболочек, гибких нитей, рукавов и т.н. Они широко используются в зажимных, фиксирующих, переключающих и тормозных механизмах современных автоматизированных производств. К ним относятся мембранные и сильфонные пневмоцилиндры с относительно малой величиной рабочего хода штока. Плоская резиновая мембрана позволяет получить перемещение штока на 0,1...0,5 от ее эффективного диаметра. При выполнении мембраны в форме гофрированного чулка рабочий ход увеличивается до нескольких диаметров мембраны. Такие пневмоцилиндры называются сильфонными. Они могут быть с внешним и внутренним подводом воздуха. В первом случае длина гофрированной трубки под действием давления уменьшается, во втором увеличивается за счет деформации гофров. В качестве эластичного элемента применяется резина, резинотканевые и синтетические материалы, а также тонколистовая сталь, бронза, латунь.
Увеличение скорости выполнения операций во многих случаях достигается применением пневмозахватов, схемы которых показаны на рис.11.7.
Для перемещения листовых изделий используются пневмоприсоски, относящиеся к вакуумным захватам безнасосного и насосного типа. В захватах безнасосного типа (рис.11.7, а) вакуум в рабочей камере К создается при деформации самих элементов захвата, выполненных в виде гибкой тарелки, прилегающей своей кромкой к детали и подвижным поршнем, к которому прикладывается внешнее усилие. Величина вакуума при подъеме детали пропорциональна ее весу и обычно бывает не более 55 кПа. Для обеспечения лучшего притяжения, особенно для недостаточно гладкой поверхности детали, применяют захваты насосного типа, у которых воздух из рабочей камеры отсасывается насосом до глубины вакуума 70…95 кПа.
Часто применяют простые устройства эжекторного типа (рис.11.7, б), в которых кинетическая энергия струи жидкости, пара или воздуха используется для отсасывания воздуха из рабочей камеры К, находящейся между присоской П и деталью. Сжатый воздух, поступающий на вход А, проходит с большой скоростью через сопло Б эжектора и создает пониженное давление в камере В и канале Г, сообщающимся с рабочей камерой К.
Рис.11.7. Схемы пневмозахватов
Для зажима деталей цилиндрической формы применяют пневмозахваты, выполненные по схемам в и г (рис.11.7). При подводе воздуха в рабочую камеру К упругий цилиндрический колпачок охватывает шейку вала и создает усилие, достаточное для его зажима. На схеме г показан двухсторонний пневмозахват, рабочими элементами которого служат сильфоны с односторонним гофром. При создании избыточного давления внутри сильфона гофрированная сторона растягивается на большую длину, чем гладкая, что вызывает перемещение незакрепленной (консольной) стороны трубки в направлении охватываемой детали. Такими устройствами можно фиксировать детали не только круглой формы, но и с любыми фасонными поверхностями.
В ряде случаев возникает потребность в перемещении рабочих органов на большие расстояния до 10…20 м и более по прямолинейной или искривленной траектории. Применение обычных штоковых пневмоцилиндров ограничено рабочим ходом до 2 м. Конструкции бесштоковых пневмоцилиндров, удовлетворяющих этим требованиям, показаны на рис.11.8.
Рис.11.8. Схемы бесштоковых пневмодвигателей
поступательного движения
Отсутствие жесткого штока позволяет практически в два раза уменьшить длину цилиндра в выдвинутом положении. На схеме а показан длинноходовой пневмоцилиндр с передачей усилия через сильный постоянный магнит. Абсолютно герметичная гильза цилиндра выполнена из немагнитного материала, а ее внутренняя полость разделяется поршнем на две камеры, к которым подводится сжатый воздух. В поршне и каретке К, соединенной с рабочим органом, встроены противоположные полюса магнита S и N, взаимодействие которых обеспечивает передачу движущего усилия на каретку, скользящую по направляющим на внешней поверхности гильзы. Ход каретки ограничивается конечными упорами У.
Практически неограниченную длину хода имеют пневмоцилиндры с эластичной гильзой (рис.11.8, б), охватываемой двумя роликами, соединенными кареткой К. Такие пневмоцилиндры очень эффективны для перемещения штучных грузов по сложной траектории и в приводах с небольшими рабочими усилиями.
Пневмоцилиндр с гибким штоком показан на схеме рис.11.8, в. В такой конструкции тяговое усилие передается на каретку К от поршня через гибкий элемент (обычно стальной трос, облицованный эластичной пластмассой), охватывающий обводной и натяжной ролики, расположенные на крышках цилиндра.
Список литературы
1. Андреев А.Ф., Барташевич Л.В., Боглан Н.В. и др. Гидро- пневмоавтоматика и гидропривод мобильных машин. Объемные гидро- и пневмомашины и передачи. - Минск: Высшая школа, 1987. 310 с.
2. Анурьев В.И. Справочник конструктора-машиностроителя. В 3-х Т. - 5-е изд., перераб. и доп. Том 3 - М.: Машиностроение, 1980 г. - 559 с.
3. Башта Т.М. Гидропривод и гидропневмоавтоматика. - М.: Машиностроение, 1972. - 320 с.
4. Башта Т.М., Руднев С.С., Некрасов Б.Б. и др. Гидравлика, гидромашины и гидроприводы: Учебник. 2-е изд., перераб. - М.: Машиностроение, 1982. - 423 с.
5. Богданович Л.Б. Гидравлические механизмы поступательного движения: Схемы и конструкции. - М., Киев: МАШГИЗ, 1958. - 181 с.
6. Васильченко В.А. Гидравлическое оборудование мобильных машин: Справочник. - М.: Машиностроение, 1983. - 301 с., ил.
7. Каверзин С.В. Курсовое и дипломное проектирование по гидроприводу самоходных машин: Учебное пособие. - Красноярск: ПИК "Офсет", 1997. - 384 с.
8. Кононов А.А., Ермашонок С.М. Гидравлика. Гидравлические машины и гидроприводы СДМ: Методические указания к выполнению курсовой работы. - Братск: ГОУ ВПО "БрГТУ", 2003. - 61 с.
9. Кононов А.А., Кобзов Д.Ю., Кулаков Ю.Н., Ермашонок С.М. Основы гидравлики: Курс лекций. - Братск: ГОУ ВПО "БрГТУ", 2004 . - 102 с.
10. Лебедев И.И. Объемный гидропривод машин лесной промышленности. - М.: Лесная промышленность, 1986. - 296 с.
11. Лебедев Н.И. Гидропривод машин лесной промышленности. - М.: Лесная промышленность, 1978. - 304 с.
12. Навроцкий К.Л. Теория и проектирование гидро- и пневмопривода: Учебник. - М.: Машиностроение, 1991. - 384 с., ил.
13. Осипов П.Е. Гидравлика, гидравлические машины и и гидропривод: Уч. Пособие. 3-е изд., перераб. и доп. - М.: Лесная промышленность. 1981. - 424 с.
14. Осипов П.Е. Муратов В.С. Гидропривод машин лесной промышленности и лесного хозяйства. - М.: Лесная промышленность, 1970. - 312 с.
15. Прокофьев В.Н. Аксиально-поршневой регулируемый гидропривод. М.: Машиностроение, 1969. - 496 с.
16. Свешников В.К., Усов А.А. Станочные гидроприводы: Справочник. - 2-е изд., перераб. и доп. - М: Машиностроение, 1988. - 512 с.: ил.
17. Справочное пособие по гидравлике, гидромашинам и гидроприводам / Я.М. Вильнер, Я.Т. Ковалев, Б.Б. Некрасов и др.; Под. ред. Б.Б. Некрасова. - 2-е изд., перераб. и дополн. - Минск: Высшая школа, 1985. - 382 с.
18. Подготовка и оформление рукописей учебной, научной и методической литературы, издаваемой Братским государственным техническим университетом: Методические рекомендации, - 2-е изд. перераб. и доп. - Братск: БрГТУ, 2002. - 37 с.
– Конец работы –
Используемые теги: Структурная, Схема, гидро, Вода, Классификация, нцип, работы, гидро, водов, Рабочие, жидкости, гидросистем, Гидравлические, линии, Насосы, гидромоторы, гидроц, ндры0.135
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Структурная схема гидропривода. Классификация и принцип работы гидроприводов. Рабочие жидкости для гидросистем. Гидравлические линии. Насосы и гидромоторы. Гидроцилиндры
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.491 сек.
Новости и инфо для студентов