Пневмодвигуни обертального руху
Як пневматичні двигуни обертального руху (пневмомотори) застосовують переважно пластинчасті й поршневі машини і рідше – машини інших типів (шестеренчасті, гвинтові та ін.) Принцип їх дії той самий, що й у відповідних типів гідромоторів, проте характеристики тих та інших істотно відрізняються, що обумовлене в основному стисливістю робочого середовища (повітря). Це в першу чергу позначається на індикаторній діаграмі.
Поршневі пневмомотори поширені в гідросистемах вантажних машин, лебідок, шестеренчасті – в гідросистемах конвеєрів, пластинчасті – в приводах насосів та ін.
Застосовуються нереверсивні й реверсивні пневмодвигуни, причому використовування спеціальних автоматичних регуляторів  забезпечує підтримку заданої постійної потужності на валу двигуна.
забезпечує підтримку заданої постійної потужності на валу двигуна.
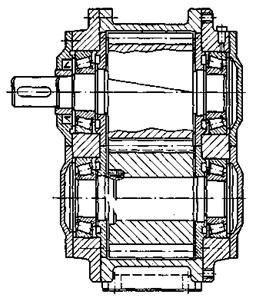
На рис. 77 наведена конструктивна схема пластинчастого пневмомотору обертального руху. Стиснене повітря підводиться через канал 4 корпусу і далі, через отвір 5 у статорі 2 – у відповідну робочу камеру пневмомотору, утворену двома суміжними пластинами 3 і поверхнями статору 2 і ротору 1.

|
| Рис. 77. Схема (а) і характеристика (б) пластиначастого пневмомотору: 1 – ротор; 2 – статор; 3 – пластини; 4 – канал корпусу; 5 – отвір у статорі; 6 – канал статору. |
Після того, як ця камера буде відсічена при обертанні ротора від каналів 5, заповнення її стисненим повітрям припиниться і при подальшому обертанні об'єм камери збільшуватиметься, повітря в ній розширятиметься, розвиваючи неврівноважену дію на обмежуючі камеру пластини і, отже, крутний момент (М). При з'єднанні камери, заповненої розширеним повітрям, з каналами 6 статора повітря віддаляється в атмосферу.
Регулювання швидкості цього пневмомотору здійснюється поворотом його статора 2 щодо осі симетрії корпусу; при цьому змінюється тривалість з'єднання робочих камер з вікном живлення, а отже, і ступінь наповнення камер стисненим повітрям.
Швидкість обертання ротора можна також регулювати зміною витрати стисненого повітря за допомогою дроселя, що включається  завичай у вхідну магістраль, а величина крутного моменту – зміною тиску, яка здійснюється за допомогою регулятора (редуктора) тиску.
завичай у вхідну магістраль, а величина крутного моменту – зміною тиску, яка здійснюється за допомогою регулятора (редуктора) тиску.
На рис. 78 наведена схема пневмомотору поршневого типу із зіркоподібним розташуванням нерухомих циліндрів і золотниковим (цапфовим) розподілом робочого середовища. Поршні 1 пов'язані з кривошипним валом 2 за допомогою шатунів 3. Чергування фаз робочого циклу здійснюється за допомогою пов'язаного з колінчастим валом розподільного золотника 4, що обертається, через вікна а, b і с якого проводиться наповнення циліндра стисненим повітрям, його розширення і випуск в атмосферу.

Рис. 78. Схема поршневого пневмомотору:
1 – поршні; 2 – кривошипний вал; 3 – шатуни; 4 – розподільний золотник;
a, b, c – вікна.
На рис. 79, а представлений нереверсивний пневмомотор шестеренчастого типу. Двигун має дві косозубі шестерні (кут нахилу зубів 6°), вали шестерень встановлені на підшипниках качіння.
| 
|
| а) | б) |
| Рис. 79. Пневмомотори шестеренного типу: а – нереверсивний; б – реверсивний. |
На рис. 79,б представлений реверсивний пневмомотор шестеренчастого типу. На відміну від двигуна, описаного вище, відпрацьоване повітря тут прямує у глушник шуму, що є акустичним фільтром низької частоти.
Реверсування описаних шестеренчастих пневмодвигунів здійснюється триходовим краном управління золотникового типу. Змащення косозубих шестерень здійснюється автомаслянкою, що подає оливу в потік стисненого повітря.