Q Принцип дії асинхронної машини. - раздел Философия, Конспект лекцій з дисципліни Електротехніка, електроніка та мікропроцесорна техніка Q Магнітне Поле, Що Обертається
Q Режими Роботи Асинхронної Машини...
Генератори, що перетворюють механічну енергію в електричну і двигуни, що перетворюють електричну енергію в механічну мають загальну назву – електричні машини. На відміну від машин, що обертаються, трансформатори уявляють собою статичні електромагнітні пристрої. Головною характерною рисою, загальною для електричних машин і трансформаторів, є те, що вони відносяться до енергоутворюючих пристроїв, що працюють на принципі електромагнітної взаємодії.
Асинхронні машини
З числа різних видів електричних машин (двигунів, генераторів) найрозповсюдженішими є асинхронні безколекторні машини, які найчастіше використовуються як двигуни.
Асинхронна машина – це машина, при роботі якої збуджується обертове магнітне поле (магнітне поле, що обертається) і змушує обертатись ротор. Ротор обертається асинхронно відносно поля, тобто з кутовою швидкістю, відмінною від кутової швидкості поля.
Асинхронна машина винайдена в 1888 р. російським вченим Доліво–Добровольським, але і до нашого часу зберегла всі конструктивні особливості, закладені винахідником.
Асинхронна машина проста і дешева. Загальний недолік – відносна складність і неекономічність регулювання їх експлуатаційних характеристик.
Принцип дії асинхронної машини
Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Якщо до ротора прикласти зовнішній момент опору (навантаження) то рівновага порушиться – момент опору буде більший за обертаючий момент. В результаті швидкість обертання ротора почне зменшуватись, швидкість перетинання магнітними лініями стрижнів збільшуватись, індуковані в стрижнях ЕРС і, відповідно, струми збільшуватись, збільшується обертаючий момент і, кінець–кінцем при деякій новій швидкості обертання ротора знову досягнеться рівновага моментів.
З цього програшу подій – висновок: кожному значенню моменту опору відповідає певна швидкість обертання ротора.
Швидкість обертання ротора і магнітного поля неоднакові. Ступінь відставання швидкості обертання ротору n від швидкості обертання магнітного поля n0 оцінюється величиною ковзання
звідки
При зміні швидкості обертання ротора n = 0 ¸ n0ковзання змінюється S = 1¸0.
Розглянута модель механізму – не є двигуном.
В асинхронному двигуні магнітне поле, що обертається утворюється електричним шляхом нерухомими обмотками, що живляться трифазним струмом.
Магнітне поле, що обертається
Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми ІА, ІВ, ІС, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.
Можна показати, що три пульсуючі потоки утворюють спільне магнітне поле, незмінне за величиною і, що обертається з постійною швидкістю відносно нерухомих катушок.
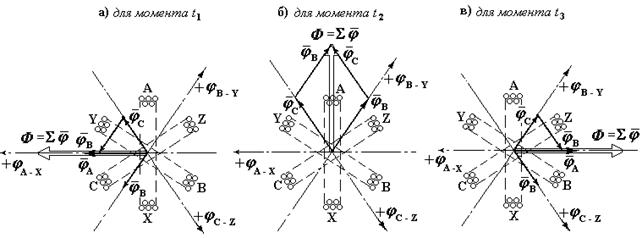
Так на малюнках (а), (б), (в) показані утворення сумарних магнітних потоків Ф = Sj =`jA +`jB +`jC для трьох послідовних моментів часу t1, t2, t3. Величини векторів jA, jB,jC взяті з графіку зміни магнітних індукцій в часі. Оскільки магнітний потік Ф пропорційний струму, що його утворює (за законом Ома для магнітних кіл Ф = Iw/Rм), то графіки зміни магнітних потоків збігаються у відповідному масштабі з графіками зміни струмів в фазних обмотках A–X, B–Y, C–Z.
Сумарне магнітне поле обертається в площині осей катушок з кутовою швидкістю w, тобто повний оберт вектор магнітної індукції здійснить за один період зміни струму в катушці. Воно послідовно співпадає за напрямком з віссю тієї з фазних обмоток, струм в якій досягає максимального значення. Тобто магнітне поле обертається в напрямку послідовності фаз трифазної системи струмів в фазних обмотках.
Наслідок: щоб змінити напрямок обертання магнітного поля достатньо змінити порядок підключення двох (із трьох) фазних обмоток.
Отже трифазна симетрична система струмів збуджує магнітне поле з однією парою полюсів, тобто двополюсне магнітне поле, що обертається. Його вісь повертається на 360°, тобто здійснює один оберт за час одного періоду зміни струму. Звідки, частота обертання n0 двополюсного поля дорівнює за величиною частоті f1 струмів в обмотці статора.
За історичною традицією частоту обертання прийнято визначати числом обертів n0 за хвилину n0 = 60×n0 = 60×f1.
Враховуючи, що n0 = f1, кутова швидкість обертання двополюсного поля W0 = 2pn0 = 2pf1 = w [радіан / сек.].
Отже, кутова швидкість обертання двополюсного магнітного поля за величиною дорівнює кутовій частоті струмів в обмотках статора.
В багатополюсній обмотці статора кожній парі полюсів поля, що обертається, відповідає трійка котушок для фазних обмоток. Звідки, якщо поле повинно мати р пар полюсів, то кожна з фазних обмоток статора повинна бути розділена на р частин. При цьому частота обертання магнітного поля складає n1 = 60×f / р.
Режими роботи асинхронної машини
Режим роботи трифазної асинхронної машини визначається режимом електро–магнітної взаємодії струмів в обмотках статора і ротора. В залежності від значення ковзання трифазна асинхронна машина може працювати в одному з трьох режимів двигуна, генератора і електромагнітного гальма.
В режимі двигуна (0 < S < 1) трифазна асинхронна машина є перетворювачем електричної енергії в механічну. Ротор двигуна повинен обертатись асинхронно повільніше поля, з такою частотою обертання, при якій струми в обмотці ротора утворюють обертаючий момент, що врівноважує гальмуючий момент від тертя і навантаження на валу.
В режимі генератора S < 0 – швидкість обертання ротора більша за швидкість обертання поля.
В режимі електромагнітного гальма напрямки обертання ротора і магнітного поля протилежні.
Конструкція ротора
Асинхронні машини в основному відрізняються будовою ротора.
В більшості двигунів використовується короткозамкнутий ротор. Цей ротор дешевший і, що суттєво, обслуговування двигуна з таким ротором простіше. Конструкція – “біляче колесо” – була вже розглянута.
Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотка статора включається безпосередньо в трифазну мережу. Включення реостату в коло ротора дає можливість суттєво покращити пускові умови для двигуна – зменшити пусковий струм і збільшити початковий (пусковий) обертаючий момент. Крім того, за допомогою реостату, включеного в коло ротора, можна плавно регулювати швидкість двигуна.
Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Механічні характеристики асинхронного двигуна.
З принципу роботи двигуна стає очевидно, обертаючий момент двигуна Мпри незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n,оскільки . Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М(S) і М(n) мають назву механічні характеристики асинхронного двигуна.
На характеристиці можна відмітити:
· максимальний або критичний момент Мк;
· пусковий момент Мпуск (при пуску двигуна, тобто при S = 1 або n = 0);
· номінальний момент Мн, що відповідає номінальному режиму роботи двигуна (йому відповідає номінальна частота обертання ротора nном, що вказується в паспорті двигуна).
Щоб двигун почав обертатись під навантаженням, необхідно, щоб його пусковий момент був більшим за гальмуючий пусковий момент механізму, на який працює двигун. Двигун розганяється у відповідності з механічною характеристикою: розгін починається з точки с, потім проходиться точка б і двигун опиняється в сталому режимі, тобто обертається з частотою n на ділянці а – б в точці, що відповідає умові М = Мг (де Мг – гальмуючий момент). Отже, ділянка б – с відповідає розгону, а ділянка а – б – робочому режиму, на якій при зміні обертаючого моменту М від 0 до Мк частота обертання двигуна змінюється мало.
Стійка робота двигуна, тобто робота при n » const, можлива тільки на ділянці а – б. Як це було показано раніше, – як би не змінювався гальмуючий момент, в межах ділянки а – б двигун може так змінити обертаючий момент, що умова його стійкої роботи завжди зберігається. В цьому полягає властивість внутрішнього саморегулювання асинхронного двигуна.
Коли гальмуючий момент стає рівним максимальному (критичному), обертаючий момент почне зменшуватись і рівність М = Мгстає неможливою.
По значенню відношення Мк/ Мном= gможнасудитипроперевантажувальну здатність двигуна. В асинхронних двигунах g= 1,7 ¸ 2,5.
Двигуну з фазним ротором відповідає родина механічних характеристик.
Звичайно робота двигуна відповідає залежності з Rp = 0. Ця характеристика аналогічна характеристиці двигуна з короткозамкнутим ротором і має назву природня.
Якщо трифазний реостат в колі ротора вивести на максимальний опір, то можна збільшити пусковий момент, а потім, зменшуючи опір реостату до нуля, вивести двигун в найбільш сприятливий режим.
Механічні характеристики, що отримані при введені реостату в коло фазного ротора, називається реостатними.
Обертаючий момент і ковзання, що відповідають роботі двигуна при повному навантаженні, називаються номінальним моментом Мн іномінальним ковзаннямSн.
ХЕРСОНСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ... Кафедра енергетики та електротехніки...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Q Принцип дії асинхронної машини.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
КОНСПЕКТ ЛЕКЦІЙ
з дисципліни
Електротехніка, електроніка та мікропроцесорна техніка
Розрахунок.
Оскільки струм в опорі навантаження менший за струм стабілізації баретера, необхідно паралельно навантаженню включити опір R1, через який повинен протікати надлишковий струм І
Котушка індуктивності.
Будь–яка зміна струму і в колі з котушкою індуктивності викликає зміну магнітного потоку Ф, створеного цим струмом. Змінний магнітний потік пронизує всі витки котушки індуктивності і
Котушка індуктивності на змінному струмі
При проходженні змінного синусоїдального струму ЕРС самоіндукції повинна повністю урівноважувати прикладену напругу, тобто
Ємність
Основною технічною характеристикою конденсатора є його електроємність С (ще його номінальна (робоча напруга)). Ємність вимірюється в фарадах (Ф) або мікрофарадах (мкФ).
Ємність зале
Конденсатор на змінному струмі
При підключенні до конденсатора змінної синусоїдальної напруги u = Um sin wt в колі з конденсатором виникає струм
Символічний метод
Вже можна передбачити, що при розрахунках кіл змінного струму необхідно буде використовувати складні перетворення з величинами, до яких входять тригонометричні функції, або виконувати графічні дії
Розрахунок.
Скористаємось спрощеною схемою заміщення і визначимо опір цієї схеми.
Коефіцієнт трансформації k = U1 / U
Зміна вторинної напруги трансформатора
Величину вторинної напруги U2 навантаженого трансформатора іноді зручніше визначати не за розглянутою в прикладі методикою, а за готовою формулою.
Познач
Трифазні трансформатори
При трансформації трифазного струму використовують або три однофазних трансформатори, або трифазний трансформатор з спільним магнітопроводом для всіх трьох фаз. Останній спосіб застосовується в уст
Навантажувальна здатність трансформатора
Номінальні параметри трансформатора
Робота трансформатора супроводжується втратами енергії, що виділяється у вигляді тепла в обмотках і магнітопроводі. Втрати потужності в обмотках D
Багатополюсні генератори.
Втеперішній час на теплових електростанціях застосовуються головним чином двополюсні турбогенератори із швидкістю обертання n = 3000 об./хв. При двополюсному роторі один пов
Статичні і динамічні характеристики схем включення.
Вольт-амперні характеристики транзисторів розділяють на статичні і динамічні.
Статичні характеристики є графічним відображенням залежностей між струмами і напругами на
Хрест-характеристика транзистора
Для практичного використання вольт-амперних характеристик транзистора в аналізі і розрахунку зручно використовувати суміщену хрест-характеристику, на якій в однаковому масштабі у відповідних квадра
Підсилювачі.
Пристрої, призначені для підсилення електричних сигналів мають назву підсилювачі.
Процес підсилення є один з випадків процесу керування енергією і, в принципі полягає в то
Характеристики підсилювачів
· Викривлення, що виникають у підсилювачі внаслідок неоднакового підсилення сигналів різної частоти називаютьчастотними викривленнями.Вони виникають за рахунок реактивних елементів
Характеристики підсилювачів
· Викривлення, що виникають у підсилювачі внаслідок неоднакового підсилення сигналів різної частоти називаютьчастотними викривленнями.Вони виникають за рахунок реактивних елементів
Електронний генератор синусоїдальних електричних коливань
Самозбуджуємий генератор (автогенератор) синусоїдальних коливань уявляє собою резонансний підсилювач з додатним зворотним зв’язком без стороннього джерела вхідного сигналу.
Вступ до модуля “Мікропроцесорна техніка”.
Цей розділ принципово відрізняється від попередніх. Якщо в розділі “Основи електротехніки” розглядалась робота електротехнічних пристроїв з точки зору електроенергетики, а в розділ
Уявлення про інтегральні схеми
Інтегральна схема (ІС) – це мікроелектронний виріб, що виконує певну функцію по перетворенню і обробці сигналів і має високу щільність електрично з’єднаних мікромініатюрних радіоелектронних елемент
Уявлення про мікропроцесорні засоби
Розвиток технології і схемотехніки мікроелектронних схем призвів до створення великих інтегральних схем (ВІС), що являють собою універсальні за призначенням, функціонально закінчені пристрої і по с
Типова структура мікропроцесорного пристрою
На рисунку представлена спрощена типова структура мікропроцесорного пристрою (або системи), призначеного для обробки даних або керування деяким процесом. Приблизно таку ж структуру мають мікро-ЕОМ
Системи числення
Система числення – сукупність прийомів і правил зображення чисел цифровими знаками. Системи числення діляться на непозиційні і позиційні.
Непозиційні системи ч
Загальні відомості про уявлення інформації в МП-системах
Інформація в МП-системах являє собою дані, що підлягають обробці, і програми обробки цих даних. Як вже відмічалося, використовується цифровий спосіб представлення інформації, тобто і команди програ
Додаткова інформація
Арифметичні операції над двійковими числами відрізняються простотою і легкістю технічного виконання. Приклади:
Додавання :
0 + 0 = 0
0 + 1 = 1
1 + 0 = 1
Кодування чисел в МП-системах
Вихідні дані, а також проміжні результати в МП-системах можуть бути додатними і від’ємними. Для зображення знаку числа в розрядній сітці перед старшим цифровим розрядом вводиться додатковий знакови
Елементи алгебри логіки
Для математичного опису роботи МП-пристроїв, синтезу і аналізу схем широко використовується алгебра логіки (алгебра висловлювань, булева алгебра [Джордж Буль – англійський м
Логічні операції
Операція «НЕ» (інверсія, логічне заперечення, NOT). Нехай є деяке висловлювання А. Заперечення цього висловлювання позначається`
Ugrave; 1= 1
Правило логічного множення справедливе не тільки для двох співмножників, але і для будь-якої їх кількості, тобто A Ù B Ù
Uacute; 1= 1
Правило логічного додавання справедливе не тільки для двох доданків, але і для будь-якої їх кількості, тобто A Ú B Ú
Тригерний пристрій та його схемна реалізація.
Тригер – електронний пристрій, за допомогою якого можна запам’ятовувати, зберігати і зчитувати двійкову інформацію. Він має два стійких стани рівноваги: один із стійких станів прий
Синхронний однотактний RS–тригер.
На рисункунаведена схема і умовне позначення синхронного однотактного RS–тригера, виконаного на елементах І–НЕ. Елементи 1 і 2 утворюють схему вхідної логіки RS–тригера, поб
Т–тригер.
Це тригер з лічильним входом (однорозрядний лічильник). Він може бути побудований з використанням двотактного синхронного RS–тригера. Т–тригер реалізує функцію виду
D–тригер.
D–тригер на основі двотактного RS–тригера:
а) – функціональна схема; б) – умовне графічне позначення.
JK–тригер.
Розповсюдженим типом тригера в системах інтегральних логічних елементів є універсальний двотактний JK–тригер а) – схемна реалізація; б) – умовне позначення:
Регістр як вузол МП-системи. Призначення та класифікація.
При виконанні різних арифметичних і логічних операцій і взагалі при обробці інформації виникає необхідність в зберіганні коду числа на протязі деякого часу. Іноді необхідно зсунути цей код вправо а
Регістри прийому і передачі інформації.
На схемах, що наводяться далі, будуть показані лише ті кола, про які безпосередньо йде мова. Якщо, наприклад, говориться, що регістр містить код слова, то існують кола, по яких цей код занос
Приклади схемної реалізації зсуваючого регістру
Зсуваючі регістри призначені для виконання операції зсуву коду слова, тобто для переміщення цифр слова в напрямку від старших до молодших розрядів (зсув вправо) або від молодших до
Реалізація порозрядних операцій в регістрах.
Звичайно, операція видачі коду з регістра об’єднується з операцією прийому цього коду на інший регістр. В процесі передачі інформації з регістра на регістр можлива змістовна переробкакодів слів. В
Лічильник як вузол МП-системи. Призначення та класифікація
Лічильник уявляє собою пристрій, призначений для підрахунку числа сигналів, які надходять на його вхід, і фіксації цього числа у вигляді коду, що зберігається в тригерах. Кільк
Лічильник з паралельним переносом.
Для прискорення спрацьовування лічильники виконують з паралельним переносом. На рис. 2 зображена схема чотирьохрозрядного лічильника на JK–тригерах з паралельним переносом. Як схеми І
Реверсивний лічильник з послідовним переносом.
В реверсивному лічильнику передбачена спеціальна перемикаюча схема для переключення лічильника або в режим додавання, або в режим віднімання.
Дешифратори. Класифікація.
Дешифратором називається комбінаційна схема, яка має n входів і до 2n виходів, і, яка перетворює n
Шифратори і перетворювачі кодів
Шифратори і перетворювачі кодів – це комбінаційні схеми, призначені для перетворення числової інформації з однієї двійкової форми в іншу.
Розглянемо побудову методом синте
Мультиплексори
Мультиплексор – це комутатор інформаційних сигналів, що забезпечує передачу інформації, яка надходить по одній, вибраній з кількох, вхідній лінії зв’язку, на одну вихідну лінію. Вхідна лінія
Суматор як вузол МП-системи. Призначення та класифікація.
Суматор – електронний вузол, що виконує операцію сумування цифрових кодів двох чисел. Сумування полягає в порозрядному додаванні значень цих чисел і додаванні в кожному розряді одиниц
Багаторозрядні суматори
В залежності від того, як передаються коди доданків, можуть бути два способи додавання, а відповідно два типу су
Запам’ятовуючі пристрої мікропроцесорних систем
Запам’ятовуючі пристрої (ЗП) – це найважливіша складова частина будь-якої мікропроцесорної системи.
За функціональним призначенням всі ЗП можна поділити на такі
Оперативні запам’ятовуючі пристрої
За принципом зберігання інформації напівпровідникові ОЗП поділяються на динамічні і статичні.
Динамічні ЗП побудовані на основі запам’ятовуючого ел
Постійні запам’ятовуючі пристрої
Постійні запам’ятовуючі пристрої (ПЗП) в МП-системах використовуються для зберігання програм та іншої незмінюваної інформації. Важлива перевага ПЗП в порівнянні з ОЗП – зберігання інф
Типова структура мікропроцесора.
Мікропроцесор (МП) – функціонально закінчений пристрій обробки інформації, керований командами програми, які по черзі надходять із запам’ятовуючого пристрою МП-системи.
Конструктивн
Основні сигнали процесора.
При використанні конкретного МП необхідно ясно уявляти динаміку його роботи, тобто на яких шинах, в залежності від яких керуючих сигналів і коли МП буде видавати ту чи іншу інформацію. Це в подальш
Особливості побудови МП-систем
МП-система – це сукупність взаємодіючих ВІС МП–набору, яка організована в систему з мікропроцесором (вузол обробки інформації) (див. лекцію 18). До складу типової структури МП–системи входять мікро
Мікропроцесорні засоби в системах керування
Мікропроцесорні засоби все частіше використовуються в системах керування, в тому числі і системах, що працюють в реальному часі. МП-системою реального часун
Принцип перетворення напруги в цифровий код.
Принцип перетворення напруги в цифровий код полягає в наступному. Нехай датчик вимірює значення деякого параметра, який змінюється довільно, і видає напругу пропорційну вимірюваній
Перетворювачі напруги в код.
Схеми перетворювача напруги в код ступінчастого типу наведена на рис. 2-а. На вхід схеми подається напруга Uвх, яка за допомогою часово-імпульсного перетворювача
Перетворювачі кута повороту в код.
Широке розповсюдження отримали перетворювачі кутових переміщень в код, що уявляють собою кодуючий диск, який закріплений на валу вимірювального механізму.
Диск розбивається на концентричні
Цифрово-аналогові перетворювачі.
Двійкові коди в аналогові еквіваленти перетворюються різними способами, але всі вони основані на додаванні аналогових складових, пропорційних деяким двійковим приростам (елементам) вихідного двійко
Перетворювач коду в напругу.
Приклад схеми перетворювача двійкового коду в напругу представлений на рис. 5.
Рис. 5. Схема
Перетворювач коду в кут повороту.
Перетворювачі коду в кут повороту часто називають цифровими слідкуючими системами. Одна з можливих схем цифрової слідкуючої системи наведена на рис. 6.
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail

 Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною.
Двополюсний підковоподібний магніт обертається з постійною швидкістю. Між полюсами магніту розташований барабан – ротор, виконаний з струмоводних стрижнів у вигляді “білячого колеса”. Магнітні лінії поля при обертанні магніту перетинаючи стрижні ротора, індукують в них ЕРС, що обумовлює появу в стрижнях струмів. В результаті взаємодії струмів в стрижнях з магнітним полем виникає сила, що утворює електромагнітний обертаючий момент. Під дією цього моменту ротор починає обертатись в напрямку обертання магнітного поля. Із збільшенням швидкості обертання ротору і, відповідно, зменшенням відносної швидкості руху стрижнів в магнітному полі індуковані в них ЕРС поступово зменшуються, в зв’язку з цим зменшуються струми в стрижнях ротору і відповідно зменшується обертаючий момент. При певній швидкості обертання ротора (меншій за швидкість обертання магнітного поля) настає рівновага між магнітним обертаючим моментом і моментом опору (тертя) і далі швидкість обертання ротору при рівновазі моментів залишається постійною. звідки
звідки 

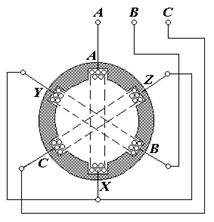 Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми ІА, ІВ, ІС, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.
Статор асинхронної машини уявляє собою циліндр, зібраний з листової сталі з пазами на внутрішній поверхні. В діаметрально протилежних пазах A–X, B–Y¸ C–Z розташовані витки котушок з однаковим числом витків. Кут між площинами котушок складає 120°. Початки котушок A, B, C приєднані до мережі трифазного струму частотою f1, а кінці X, Y, Z об’єднані в загальну нульову точку. В обмотках котушок протікають синусоїдальні струми ІА, ІВ, ІС, взаємно зсунуті по фазі на третину періоду. Кожна котушка окремо створює пульсуючий магнітний потік, вісь якого співпадає з віссю відповідної котушки.


 Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.
Обмотки фазного ротора або ротора з контактними кільцями виконуються з ізольованого проводу. В більшості випадків обмотка трифазна з тим же числом котушок, що і обмотка статора. Три фазні обмотки ротора з’єднані на самому роторі «зіркою», а вільні їх кінці приєднані до трьох контактних кілець, укріплених на валу і електрично ізольованих від нього. Через кільця і струмоз’ємні щітки обмотки ротора замикаються на трифазний реостат.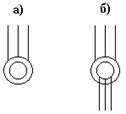 Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.
Умовні позначення асинхронних машин з короткозамкнутим (а) і фазним (б) роторами на принципових та електричних схемах.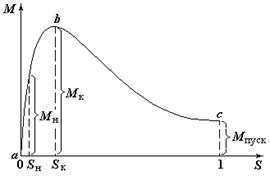 З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n, оскільки
З принципу роботи двигуна стає очевидно, обертаючий момент двигуна М при незмінній швидкості обертання магнітного поля цілком залежить тільки від ковзання S, або від швидкості обертання ротора n, оскільки  . Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М(S) і М(n) мають назву механічні характеристики асинхронного двигуна.
. Задаючи різні значення S в межах 0 ¸ 1 можна побудувати графік залежності обертаючого моменту М від S або М від n. Залежність М(S) і М(n) мають назву механічні характеристики асинхронного двигуна.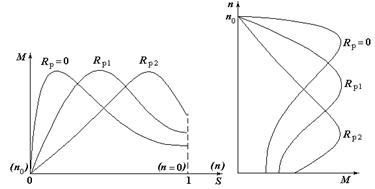 По значенню відношення Мк / Мном = gможнасудитипроперевантажувальну здатність двигуна. В асинхронних двигунах g= 1,7 ¸ 2,5.
По значенню відношення Мк / Мном = gможнасудитипроперевантажувальну здатність двигуна. В асинхронних двигунах g= 1,7 ¸ 2,5.





Новости и инфо для студентов