рефераты конспекты курсовые дипломные лекции шпоры

Реферат Курсовая Конспект
Конспект лекцій
Конспект лекцій - Конспект, раздел Философия, Конспект лекцій "автоматизації електричним транспортом" З Дисципліни «Керування Та Засоби Автоматизації Електричним Транспор...
з дисципліни «Керування та засоби
автоматизації електричним транспортом»
для студентів спец. 6.092209
«Електричний транспорт»
Кривий Ріг
2010рік
Задачі автоматизації та керування на транспорті
Совокупність керуючих дій, скерованих на те, щоб дійсний хід процесу відповідав бажаємому, називається керуванням.
Якщо існує деякий орган, який систематично або у зв’язку з необхідністю виробляє керуючу дію, називається системою керування.
Керування передбачає наявність керуємого об’єкту або групи об’єктів.
Процес керування – це цілеспрямована дія керуючої системи на керуєму, яка орієнтована на досягнення визначеної мети та використовує основним чином інформаційний потік.
Оптимальне керування – це вибір найкращих керуючих впливів із багатьма можливих з урахуванням обмежень та на основі інформації про стан керує мого об’єкту і зовнішнього середовища.
Рівень керування виробничим процесом є важливим фактором, який визначає рівень ефективності виробництва.
АСУ являє собою організаційно-технічну систему, яка забезпечує вироблення рішень на основі автоматизації інформаційних процесів.
У залежності від сфери автоматизуємої діяльності автоматизовані системи поділяють на:
- АС керування;
- сист. автоматичного проектування(САПР);
- АС наукових досліджень;
- АС обробки інформації;
- АС технологічної підготовки виробництва;
- АС контролю та випробувань;
- сист. Автоматизуючи різні види діяльності.
Таким чином, АСУ – це людськомашинна система яка використовується для збирання, обробки та видачі інформації, необхідної для оптимізації керування у різних сферах людської діяльності.
Інформаційно-навігаційні системи керування транспортом
У теперішній час використовуються системи, які поєднують сучасні навігаційні системи з системами мобільного зв’язку для рішення різних прикладних задач. До даних систем відносяться системи керування транспортом з можливістю організації зв’язку з транспортними одиницями та автоматичним від слідкуванням та відображенням їх текучих координат у просторі.
Зв'язок на УКВ діапазоні діє на незначні відстані. КВ-діапазон забезпечує зв'язок на великі відстані, але цей зв'язок нестабільний і можливий лише на деякі періоди доби. До того ж обладнання і антени досить дорогі.
Супутниковий зв'язок дозволяє широку зону зв’язку. Система «Евтелтракс» обіймає зону з північного льодовитого океану до Африки та від Атлантики до Уралу. З 2000 р. зона зв’язку розширилася на схід і в перспективі обійме всю Сибір.
У експлуатації ці системи надійні та прості.
Зв'язок з транспортною системою та нагляд за переміщенням транспорту відбувається в офісі або у диспетчерській службі.
До таких систем існують вимоги:
- надійність доставки повідомлення;
- регулярне автоматичне визначення місця знаходження транспорту;
- автоматичне надходження та зберігання інформації;
- незначні витрати енергії;
- низька вартість;
- конфіденціальність зв’язку (використання кодування інформації, паролі і т.ін.);
- наявність текстового зв’язку (інформаційні текстові повідомлення);
- дистанційний контроль параметрів (витрати пального, несанкціонований доступ до вантажу, температура у рефрижераторі та ін.);
- сигнал небезпеки (аварія, напад, хвороба).
Система «Евтелтракс» збільшує ефективність праці на 15-20%.
Супутникове позиціонування – метод визначення координат об’єкта у тривимірному просторі з використанням супутникових систем.
Автомобіль, який має такий приймач, переміщуючись по місцевості, автоматично фіксує свої координати. Може бути здійснено ввід додаткової інформації. Данні зберігаються у цифровому вигляді і можуть бути виведені на екран для візуалізації і контролю.
Перші системи з’явились у 1970 р. NNSS(США), ЦИКАДА(СССР).
Друге покоління таких систем: GPS(США) та ГЛОНАСС(РФ).
Орбітальні групи GPS та ГЛОНАСС складаються з 24 космічних апаратів. GPS – у 6, а ГЛОНАСС у 3 площинах, розташованих через 60 та 120 градусів.
Для передачі даних керуючий сигнал модулюється по фазі, частоті та амплітуді.
На супутниках еталонні генератори високо стабільних коливань одночасно є зберігачами часу.
На борту кожного супутника сигнали формуються від 4 цезієвих атомних стандартів з відносною нестабільністю частоти близько за добу. Передаваємі радіосигнали несуть мітки часу. По цим міткам на землі за допомогою станцій служби часу вмикається визначення часових шкал з державним еталоном. За цим же часом синхронізують заміри і в апаратурі користувача.
за добу. Передаваємі радіосигнали несуть мітки часу. По цим міткам на землі за допомогою станцій служби часу вмикається визначення часових шкал з державним еталоном. За цим же часом синхронізують заміри і в апаратурі користувача.
Технологічні принципи реалізації визначення транспортного засобу у локальних та загальних АСУ
У системах автоматичного(автоматизованого) визначення місцезнаходження транспортного засобу визначається автоматично по тому, як він переміщується у межах даної географічної зони.
По призначенню вони поділяються:
- диспетчерські системи;
- системи дистанційного супроводження;
- системи поновлення маршруту;
У залежності від розмірів географічної зони де діє система визначення місцезнаходження транспортного засобу, вона може бути:
- локальною(малий радіус дії);
- зональною(обмежена – область, регіон);
- глобальна(декілька країн);
Методи визначення місцезнаходження транспортного засобу поділяються на 3 основні категорії:
- зональні;
- методи навігаційного зчислення;
- методи радіочастотні.
1. Методи приближення
За допомогою значної кількості контрольних пунктів, місцезнаходження яких відомо, будується система контрольних зон. Місцезнаходження транспортного засобу визначається по проходженню контрольних зон. Індивідуальний код транспортного засобу передається у підсистему керування та обробки даних. Точність визначається кількістю контрольних пунктів.
2. Визначення місцезнаходження транспортного засобу за частотою.
Місцезнаходження транспортного засобу визначається за допомогою вимірювання різниці шляху між транспортним засобом та трьох або більше радіомаяків.
Така група методів поділяється на:
- радіопеленгацію;
- радіонавігацію;
Радіопеленгація. Місцезнаходження транспортного засобу визначається за допомогою засобів пеленгації розташованих по деякій місцевості та радіомаяку, який розміщений на транспортному засобі.
Розроблені такі системи: ГИПС (або СКИФ), система ЛОД ЖЕК (для ГАИ).
Радіонавігація. Супутникові навігаційні системи у яких точність сягає 50-100м. таких систем розроблена значна кількість.
3. Методи навігаційного зчислення.
Такі методи засновані на визначенні параметрів руху транспортного засобу за допомогою датчиків прискорення , кутових швидкостей, пройденого шляху та напрямку. На базі цих даних визначається місцезнаходження у реальному часі транспортного засобу. Така система розроблена ЗАО «Автонавігатор». У бортовій системі використовується датчик шляху, підключений до спідометра, датчик шляху на основі ферозондів, які вимірюють відхилення вісі машини від магнітного меридіану Землі та датчик прискорення (акселерометр), який забезпечує усунення помилок ферозондового датчика, які виникають від негоризонтального положення об’єкта по відношенню до поверхні Землі. Використовуються дуже широко, як допоміжні при супутниковій навігації.
Системи супутникового зв’язку
Система Inmarsat обслуговується декількома геостаціонарними супутниками, яка охоплює усю поверхню земної кулі. Система Inmarsat має можливість працювати також у стандарті сотових мереж GSM та AMPSSDMA.
Система ORBCOMM має можливість автоматизованого збору даних координат та стану об’єкта, а також послуги електронної пошти. Ця система така глобальна.
Система «Глобалстар» дає послуги по передачі голосу, даних, факсів, обміну повідомлень та послуги визначення місцезнаходження.
Система «Гонець» складається з космічного сегмента, центра керування системою, регіональних станцій та абонентських терміналів. Складовою системи є регіональні станції, які одночасно можуть використовувати 3 супутника. Ці станції організовують зв'язок у регіоні, у тому числі комутацію та маршрутизацію потоків даних та підключення абонентів до системи.
Система «Вектор» використовує обладнання Inmarsat та супутникову систему навігації NAVSTAR. Місцезнаходження транспортного засобу визначається з точністю 25-80 м.
Система Eutel Tracs була реалізована у 1992р. і має дуже велику кількість експлуатуємих мобільних терміналів по всьому світі.
Система Omni Tracs та Eutel Tracs забезпечує не тільки визначення місцезнаходження транспортного засобу, а і двосторонній обмін інформацією.
Система GPS NAVSTAR складається з 24 супутників, які дозволяють визначити місцезнаходження об’єкту з точністю 30-100м., а при методі диференціальної корекції від 2-5м.
Система «Котлин» використовує сигнали ГЛОНАСС, GPS, WASS, EGNOS та забезпечує навігаційне супроводження та контроль за станом транспортного засобу.
Існують малогабаритні супутникові системи які використовуються у межах міста або іншої місцевості. Такі системи як МИСНС яка включає супутниковий навігаційний приймач GPS, курсовий гіроскоп, одометр, електронну карту місцевості. Така система використовується у Санки-Петербурзі (Росія).
Система Logiq Dispatch використовується для диспетчеризації далеких вантажних перевезень. Вона реалізована на базі терміналів системи Inmarsat, які монтуються на автомобілях.
Високими експлуатаційними характеристиками відрізняються системи «Магеллан-М» для обробки картографічної та навігаційної інформації.
Система «Термотех» використовує навігаційно – зв’язковий контролер. Він використовується як у комплекті бортової апаратури, так і на диспетчерських центрах. Він забезпечує керування усіма режимами роботи радіоапаратури, обробку інформації на транспортному засобі. Ця апаратура забезпечує цілодобовий контроль та визначення координат автомобіля, голосовий зв'язок з диспетчером.
Над розробкою та виготовленням різних систем навігаційного контролю працюють такі фірми: «Геоспектрум», «КОРД», «TESLA», «ЮНИКОМ», «Racal», «Sprint», «Грант-Вимпел». Також багато фірм використовують для керування та слідкування за транспортом сотові системи. Такі системи мають малі габарити, рівень власних електромагнітних випромінювань (наприклад великі міста), а також для забезпечення великої площі діяльності системи.
Призначення систем авто ведення електрорухомого складу
Система авто ведення поїздів призначені для автоматизації керування пересуванням потягів, включаючи пуск та розгін, вибір режиму ведення потяга на перегонах, підгальмовування при виконанні обмеження швидкості, прицільне гальмування біля платформи, відкриття та закриття дверей, збір та обробка інформації про пересування потягу.
АСУ ПП призначені для вдосконалення керування перевезеннями – основними технологічними процесами на рейковому транспорті, які входять у склад АСУ ділянками жд доріг.
У склад АСУ ПП входить система авто ведення потягів, система інтервального регулювання пересування потягів і призначена для забезпечення безпеки руху, система диспетчерського керування.
До системи інтервального керування відносяться:
- автоблокування;
- автоматична локомотивна сигналізація;
- система автоматичного регулювання швидкості;
- система автоматичного регулювання гальмуванням;
- пристрої координатного зближення ел. потягів.
САР зв’язані з пристроями внутрішньої локомотивно автоматики, до якої відносяться:
- пристрої автоматичного пуску;
- виконавчі пристрої;
- регулятори швидкості;
- пристрої гальмування;
- протиюзні та протибуксовочні пристрої.
Система авто ведення потягів дозволяє отримати:
- підвищення точності виконання графіка руху потягів;
- підвищення використання пропускної можливості ліній та участків;
- знизити споживання електроенергії;
- підвищити продуктивність праці;
- полегшити працю машиніста;
- підвищити оперативність та об’єм інформації про рух потягів;
- автоматизувати процес керування рухом потягів.
Класифікація систем автоведення потягів
Існує велика кількість таких систем, які можуть бути класифіковано по:
- структурі;
- алгоритмам керуванням рухом;
- функціональним можливостям;
- апаратурною реалізацією.
За рівнем централізації САВП поділяються:
- централізовані;
- автономні.
Централізовані отримують інформацію про параметри руху усіх потягів на лінії.
Автономні керують по заданій програмі тільки одним потягом.
Вибір системи визначається умовами експлуатації.
За типом потягів системи автоматизації класифікуються:
- метрополітени;
- приміські потяги;
- пасажирські;
- вантажні.
Особливості використання МП
на ел. рухомому складі
Системи керування ЕРС по складу являють собою ієрархічну систему у яку входять місцеві МП, контролери, які виконують локальні функції керування окремими агрегатами локомотиву, внутрішньо системний мультиплекс ний канал зв’язку та керуємо ЕОМ.
Такі системи автономні і виконують керування у відповідності заданою програмою руху тільки одним потягом. Використання ЕОМ у СУ забезпечує сумісність бортових систем з системами комплексного автоматичного руху потягів (АСУ РП).До бортових СУ висуваються дуже високі вимоги у частині умов експлуатації, температурного режиму та рівня вібрації.
Це відноситься до МП систем.
При автоматичному керуванні рухом потягів установки режимів ведення розраховуються та передаються контролерам керуючого бортового ЕОМ у відповідності з заданим алгоритмом ведення потяга, графіком руху, сигналами диспетчерського пункта і т.ін.
ЕОМ може розташовуватись у кабіні машиніста.
Система керування, автоматики і зв’язку та обробки даних на THC з використанням МП можливо поділити на 3 класи:
- прилади і системи, пов’язані з забезпеченням безпеки руху потягів;
- СУ транспортними технологічними та перевозочними процесами по напрямках, участках, станціях, гірках;
- СУ локальними технологічними процесами, об’єктами та установками у ДЕПО, на ремонтних заводах.
Оптимальне використання МП та ЕОМ на електровозах змінного струму з рекуперативним гальмуванням. На цих електровозах використовується досить складний набір алгоритмів керування. У подальшому МП керування та ЕОМ будуть використовуватись на електровозах з асинхронними та синхронними (вентильними) двигунами зі складними алгоритмами роботи. У подальшому можливо використання МП та ЕОМ на тепловозах та електровозах з напівкерованими тиристорними випрямлячами та реостатними гальмами так як алгоритми їх роботи прості, а МП стають дедалі дешевшими.
Використання МП систем керування на метрополітенах стає актуальною потребою у зв’язку з необхідністю розв’язання багатофакторних задач керування.
МП керування трамвайними вагонами , у тому числі з використанням тиристорних імпульсних перетворювачів, значно простіше, ніж метрополітеном, але проблема забезпечення надійної роботи тиристорних імпульсних перетворювачів є також дуже відповідальною задачею. Значно ускладнюється керування швидкісним трамваєм при швидкісному русі вагонів, особливо у підземних ділянках.
Експлуатаційні вимоги до МП систем керування ЕРС у значною ступені визначаються методом побудови СУ – програмного або програмно – апаратного.
Системи автоведення ЕРС
Основною метою побудови бортових мікропроцесорних СУ тяговим ЕРС є автоматизація процесу керування рухом потягів для забезпечення графіком руху з дотриманням швидкості та раціональним використанням електроенергії на тягу , виконання збільшення об’ємів пасажирських перевезень за рахунок вдосконалення технологічного процесу керування, збільшення пропускної спроможності ліній, підвищення безпеки руху потягів.
На метрополітені збільшення кількості вагонів у складі потягу при незмінній його довжині та повне використання пропускної можливості станцій висувають високі вимоги до СУ з точки зору точності зупинки, інтенсивності гальмівного процесу, економії електроенергії.
Фірма BBC (Германія) розробила систему авто ведення для локомотива Е111 у залежності від необхідної величини замедления виконується одночасне або роздільне ввімкнення пневматичного по тягового з електричним та пневматичним локомотивними гальмами.
Розроблені електронні пристрої з МП та мікро-ЕОМ для різних типів приводів рухомого складу жд, метрополітену та міського трамвая. СУ будується з окремих функціональних модулів та уніфікованих приладів спряження та задовольняє вимоги по «децентралізованому інтелекту».
Одноплатні ЕОМ в рівні керування тягою рухомої одиниці доповнюються контроллерами на рівні керування привода. Ці контроллери виконують звичайні функції регулювання та керування. Контроллери оптимізовані за типами вентильних перетворювачів змінного струму.
Розділяють 4 типи контроллерів:
- контроллер для виконавчої ланки постійного струму;
- контроллер для інвертора з проміжним контуром струму і з інвертором струму послідовної комутації фаз;
- контроллер для інвертора з проміжним контуром напруги та з імпульсним інвертором;
- контроллер для керує мого від мережі випрямляча.
Контроллери через свої серійні шини отримують від названих одно платних ЕОМ задані значення струму або сили тяги. З локальних дійсних значень вони вираховують відповідну програму слідування імпульсів і таким чином встановлюють необхідний обертовий момент на тяговому електродвигуні. В зворотному напрямку контроллери передають через свої шини сигнали стану, дійсні величини та сигнали про відключення від заданих значень.
Висока концентрація функцій значною мірою полегшує пошук пошкоджень в системі. Кожен контроллер має змогу самостійно діагнозувати пошкодження. Так як всі сигнали знаходяться в одному пристрої, вони можуть бути опрошені мікропроцесором та перевірені. Кожен контролер може розрізняти близько 100 видів пошкоджень.
Для отримання інформації про стан системи передбачена можливість цифрової індикації різного роду параметрів натисненням на кнопку контролю. Користувачу також надається можливість спостереження змін параметрів функціонування системи в динамічному режимі.
У разі виникнення пошкоджень в одному з контроллерів , інформація про пошкодження передається в одноплатну ЕОМ, яка запам’ятовує отримане посилання та видаляє його з пам`яті при технічному контролі.
Принципи побудови тягової керуючої електроніки, модульне конструктивне виконання забезпечує високу експлуатаційну надійність завдяки широкому по об’єму, швидкому за часом та глибокому за рівнем діагностування електрообладнання та знаходженню дефектів. Розширена діагностика системи часто дозволяє розпізнавати пошкодження процесора без додаткових допоміжних засобів. Зручний для користування індикатор на кожному контроллері забезпечує локальне цифрове показання для відстеження вибраних параметрів.
 Окрім функцій самодіагностування та контролю, система може здійснювати функції різного роду захисту електрообладнання.
Окрім функцій самодіагностування та контролю, система може здійснювати функції різного роду захисту електрообладнання.
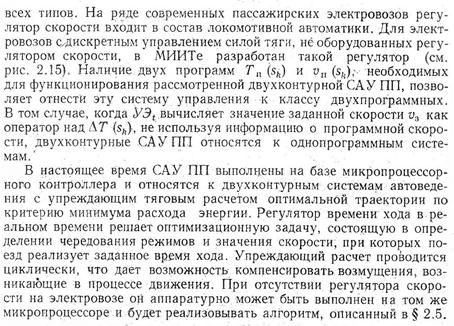
Система автоматичного керування побудована на базі мікропроцесора 10 фірми BBC, котрий здійснює регулювання параметрів керування у відповідності з даним законом. Вхідною інформацією для системи керування є значення уставки 5 тяги, гальмування та напрямку руху; вхідні сигнали 7 для реалізації заданої швидкості руху; сигнали синхронізації 6 моторних вагонів; сигнали дорегулювання захисту та попереднього гальмування 21.
Рис.1 Схема мікропроцесорної СУ електропоїздом Ве 4/4
По шині 12 в систему потрапляють діючі та задані значення сили тяги, сигнали юза та буксування; двонаправлена шина 13 необхідна для вводу та виводу інформації.
Дійсні значення струму та напруги 19 приймаються мікропроцесорною системою від датчиків 24 та через перетворювач 16 поступають на прилад керування регулятором постійного струму 14, які за допомогою формувача 15 накопичує імпульси 18 ввімкнення головних та комутуючих тиристорів регулятора постійної напруги 23 в силовій схемі 22 моторного вагона. Система виробляє керуючи сигнали для синхронізаторів моторних вагонів 3, сигнали підтвердження встановлення захисту та керування допоміжним обладнанням 20, сигнали 4 для гальмівного клапана пристрою захисту від юза та буксування.
Зв'язок мікропроцесорної системи з об’єктом керування та задавальними пристроями здійснюється через блоки спряження 8. Обмін інформацією всередині МП системи здійснюється по інформаційній шині 9; для зв’язку моторних вагонів між собою та з контроллером машиніста 1 служить поїздна магістраль 2.
Задля діагностики окремих вузлів системи та силового устаткування передбачений блок 17
та дисплей 11.
Фірмою «Еріксон»(Швеція) розроблена система автоматичної локомотивної сигналізації з контролем швидкості, виконуюча керування локомотивним світлофором та подачу звукових аварійних сигналів. В разі необхідності вказана система виконує екстрене гальмування. У якості вхідної інформації слугує інформація про фактичну швидкість руху поїзду та показання напільних сигналів, котрі поступають від прийомної антени локомотиву. Додатково в систем можуть бути введені дані про довжину потягу, максимальну допустиму швидкість на ділянці та ін.
Система авто ведення ВРАТО експлуатується на разі на Британських залізницях. Система авто ведення складається з двох підсистем (автоматичного контролю швидкості та «автомашиніст»), котрі у якості вхідної інформації використовують данні про пройдений шлях , швидкості та прискорення руху, сигналах, обмеженнях швидкості, профіль шляху, інформацію від пристроїв безпеки руху.
Функцією підсистеми автоматичного контролю швидкості є розрахунок оптимальної швидкості руху та включення в разі необхідності екстреного гальмування. Підсистема «автомашиніст» проводить розрахунок та формування керуючих воздействій для виконуючих елементів тяги та гальмування.
Фірмою «AEG-Telefunken» (ФРГ) розроблена високопродуктивна модульна мікропроцесорна система керування перспективними швидкісними локомотивами для міжміського руху типу ІСЕ. Закладений в систему керування ІСЕ-потягом принцип багатомашинної обробки інформації, полягає в тому, щоб розбити важкий процес керування на під процеси (наприклад, під процес логічної обробки, тобто вибору команд, та під процес регулювання швидкості, тяги та ін.), дозволяє підвищити готовність та надійність системи в результаті передачі керуючих функцій при відказі одного з мікропроцесорів, підвищити швидкість обробки інформації, простіше та швидше знайти та локалізувати помилки, суттєво понизити капітальні затрати. Кожний підпроцес обслуговується своїм мікропроцесором, при цьому між мікропроцесорами йде обмін даними, котрі записуються в мережений накопичувач.
Мікропроцесорна система керування ІСЕ-поїздом побудована на базі БИС серії Intel та включає до себе мікропроцесор Intel-8085А, блоки пам`яті, арифметичний розширювач на основі 16-розрядного мікропроцесора Intel-8088, периферійні блоки. При необхідності система може оснащуватись швидкодійним підпроцесором Intel-8087, існує можливість нарощування пам`яті в цілях розширення системи до 80 кбайт.
Система працює для реалізації команд, що передаються з пульту керування машиніста або від системи локомотивної сигналізації, контролю їх виконання, організації діагностики (Рис.2).
В системі, що здійснює послідовний принцип передачі інформації, в цілях підвищення надійності при обміні даними між окремими ЕОМ використовується світловодний кабель. Система Telelux, яка складає основу апаратури передачі даних, дозволяє передавати без проміжного підсилення аналогові сигнали в полосі частот від 5 МГц та цифрові сигнали зі швидкістю до 10 Мбот на відстань до 500м. передача інформації по світловоду забезпечується за допомогою одноплатної мікро-ЕОМ.
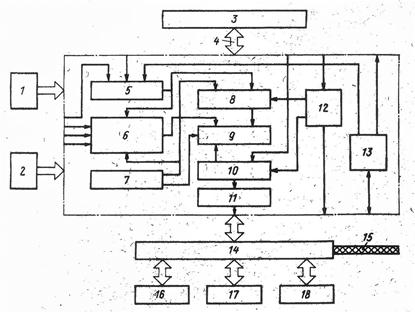
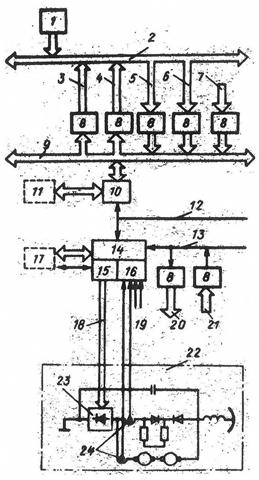
Рис. 2 СУ ІСЕ-поїздом:
1 – локомотивна сигналізація; 2 – датчики швидкості; 3 – пульт керування машиніста; 4 – фактичні і задані параметри керування; 5 – блок визначення допустимої швидкості; 6 – блок керування приціль тин гальмуванням;
7 – блок визначення фактичного прискорення; 8 – блок керування швидкістю; 9 – блок регулювання прискоренням; 10 – блок визначення сили тяги; 11 – блок обмеження сили тяги;
12 – логіка керування; 13 – тестовий контроль; 14 – інтерфейс системи передачі даних; 15 – світловодний кабель; 16 – керування тягою першого локомотива; 17 – керування тягою другого локомотива;
18 – керування гальмуванням.
Системи керування тяговим електроприводом
Ускладнення силових схем тягового електропривода, використання нових методів регулювання струму тягових двигунів з використанням перетворювальної техніки, покращуючи основні параметри рухомого складу, забезпечення оптимального режиму роботи електрообладнання при реалізації необхідної швидкості рухомого складу та високої надійності його роботи, створюють практично непереборні труднощі при апаратній реалізації таких систем. Використання мікропроцесорної техніки дозволяє якісно по-новому підійти до вирішення проблеми автоматизації керування приводом рухомого складу за рахунок переходу від апаратної реалізації логіки керування до програмного керування на базі мікро-ЕОМ.
У ієрархічній структурі бортової СУ підсистема керування тяговим електроприводом представляє собою нижній рівень та забезпечує задані значення сили тяги та струмів тягових двигунів. Мікропроцесорні засоби у такого роду підсистемах використовуються у якості: основного програмуючого пристрою керування окремими блоками електрообладнання, програмує мого логічного пристрою для автоматичного взаємозв`язування процесів керування; обчислювального пристрою для вирішення задач, зв’язаних з питаннями оптимального регулювання струму тягових двигунів по обмеженням режимів їх роботи.
Основний ефект від впровадження МП та мікро-ЕОМ в СУ тяговим приводом рухомого складу досягається в першу чергу завдяки підвищенню ефективності його використання та збільшенню виробництва за рахунок поліпшення якості керування та оптимізації режимів роботи обладнання.
При проектуванні систем цифрового керування тиристорними перетворювачами ЄПС розробниками мікропроцесорної СУ, як правило, всі компоненти СУ розділяються на дві частини: перша реалізує дискретні, регулярно повторюючись функції, реалізуємі цифровими засобами з апаратною логікою, друга – обчислювальні функції з перетворення даних, отриманих від датчиків та оператора, в керуючу дію мікропроцесора.
Мікропроцесорне керування застосоване до двох типів привода: машини постійного струму з живленням від переревача та для самокеруємої асинхронної машини з живленням від інвертора струму, котра працює в чотирьох квадрантах площини момент-швидкість.
Проектування випрямлячів, що керуються за допомогою мікропроцесорів, включаючи регулювання напруги та струму в замкнутих системах, має свою специфіку. Мікропроцесор керує роботою системи фазового керування тиристорами та забезпечує виконання інтегрального, пропорційного та диференціального законів регулювання струму та напруги шляхом розрахунку в реальному масштабі часу кута керування, необхідного для підтримання заданих рівнів. Ця система має два шестипульсних мостових перетворювачів, керування та регулювання кожним з яких здійснюється незалежно окремим мікропроцесором.
Принципи побудови мікропроцесорної системи керування асинхронного двигуна відрізняються від принципів побудови СУ тиристорними перетворювачами та випрямлячами.
Керуючі сигнали для тиристорів інвертора формуються за допомогою програмуємих таймерів, що дозволяють досягти необхідну періодичність цих сигналів, та кільцевих лічильників, які забезпечують необхідну длітєльность. Керування системою здійснюється при використання 3 рівнів переривання.
Для збільшення швидкості обробки інформації в системі використовується пристрій множення.
Контроль та діагностика.
Керування допоміжним обладнанням
Сучасні транспортні засоби потребують повного використання тягових параметрів ЄПС у всьому діапазоні швидкостей та у будь-якій фазі тягового або гальмівного режимів. В результаті цього в момент руху необхідно підтримувати на максимально можливому рівні оптимальну величину коефіцієнта щеплення колеса з рельсом та у випадку відхилення істинної величини цього коефіцієнту від заданого терміново відновлювати необхідне значення. Мікропроцесорна система захисту від проскользування колісних пар складається з блоку точного та безперервного виміру швидкості руху; блоку оцінки параметрів руху електронними методами; блоку запобігання проскользування рухомих осей; виконуючого механізму.
Побудована по модульному принципу мікропроцесорна система «К-мікро» успішно прошла випробування на спеціалізованому локомотиві при швидкостях до 10 кмгод, у процесі яких рельси поливались емульсією, виготовленою з води та олії.
Побудована на базі мікропроцесора Intel-8085A-2 система контролю (Рис. 3) з достатньою устойчивостю до завад в реальному масштабі часу проводить опит станів тиристорів перетворювача за допомогою мультиплексора, запам’ятовує в ОЗП стан чергового опитує мого тиристора та ідентифікує номер несправного тиристора, а також номер моста та блока, вмикаючих вказаний тиристор. При перевищенні деякої допустимої кількості несправних тиристорів перетворювач вимикається.
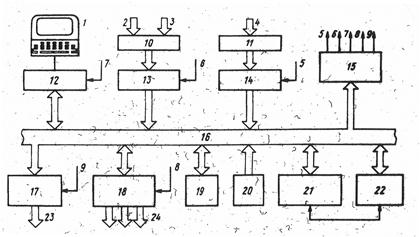
Рис.3 Схема мікропроцесорної системи контролю високовольтного перетворювача постійного струму.
1 – відео дисплей; 2 – завдання номеру блоку; 3 – завдання номеру моста; 4 – вхідні сигнали; 5-9 – сигнали вибірки пристроїв мікропроцесорної системи; 10,11 – оптоелектронне спряження; 12 – інтерфейс послідовної передачі даних; 15 – порт дешифратора адреса; 16 – канал мікропроцесорної системи; 17 – контролер друкуючого пристрою; 19 – ОЗП; 20 – ПЗП; 21 – центральний процесор; 22 – таймер; 23 – результати діагностики; 24 – вихідна інформація.
Фірмою «Knorr-Bremse GmbH» (ФРГ) сумісно з залізницями ФРГ розроблена установка противоюзного захисту типу MGS-1 з використанням МП (Рис. 4). На всіх чотирьох осях вагону встановлені датчики частоти їх обертів 1-4. по сигналам датчиків, пройденим обробку в вузлах формування та контролю датчиків частоти обертів 5-8 та в чотирьох канальному лічильникові частоти 9, інформація від закінченої ступені 15 та приладу включання вентильного захисту від юза 16, центральний процесор 10 вираховує швидкість руху вагона, за котру приймається швидкість, відповідна максимальній виміряній частоті обертів осей. Моделюючи таким чином зміни швидкості ЄПС, визначають цього прискорення, з котрим порівнюється прискорення окремих вісей.
По результатам порівняння на вентилі захисту від юза 19-26 подається команда підсилення 17 або ослаблення гальмування 18 тої чи іншої рухомої вісі. Розроблене математичне забезпечення, що знаходиться в ПЗП 12 та ОЗП 11 системи, забезпечує безперервний контроль неполадок протиюзного захисту. Зв'язок між блоками системи здійснюється за допомогою адресної шини 13, формуємої дешифратором адреса 27, та шини даних 14.
Використання бортових систем керування транспортними засобами, розроблених для автоматичного керування тяговим рухомим складом, дозволяє вирішити ряд задач, таких, як вибір оптимального розгону потягу, встановленого руху та гальмування в заданій точці шляху; зв'язок з диспетчерськими центрами; діагностика та контроль функціонування елементів забезпечення безпеки руху та бортового обладнання, закриття та відчинення дверей, сигналізація на пульті машиніста, в тому числі у вигляді дисплея або відеотермінала, керування роботою допоміжного обладнання; керування вентильними перетворювачами і т.ін.
Складність побудови, а тим більше вдосконалення таких ємких в функціональному відношенню систем на традиційних елементах електроніки та автоматики, зумовила інтенсивний розвиток різних розробок, пов’язаних з використанням мікро обчислювальної техніки в системах керування. Застосування МП та мікро-ЕОМ в бортових системах керування дозволяє реалізувати перераховані функції (або частину з них) в одній системі; дає можливість універсального використання систем керування на різноманітних видах рухомого складу (пасажирські поїзди магістральних зд або метрополітену, пригородні поїзди, рефрижераторні вагони, грузові електровози, тепловози і т.ін.); можливість комбінування вирішення задач як цифрового так і аналогового керування з підвищеною точністю; контролю в реальному часі робото спроможності системи керування та пошуку неполадок (діагностика) та багато іншого.
При цьому мікропроцесорна апаратура керування практично інваріативна до реалізуємих параметрів, а набір функцій та рівень складності системи визначається об’ємом пам’яті керуючої мікро-ЕОМ та програмами керування та може змінюватись та вдосконалюватись. Модульний принцип побудови таких систем дозволяє варіювати їх склад в залежності від складності вирішуваних задач. Окрім того, мікропроцесорні засоби, що входять в комплект сучасних бортових систем мають більшу надійність в порівнянні з електронною апаратурою, що веде до підвищення надійності системи керування в цілому, зменшення енерговитрат, маси та габаритів. Бортові системи керування можуть бути реалізовані практично на будь-якій серії мікропроцесорних БИС та мікро-ЕОМ, що випускаються промисловістю, а вибір їх ґрунтується на умовах експлуатації даної системи, доступності технічних засобів користувачеві, патентоспроможність цих засобів і т.ін.
На разі роботи з розробки бортових систем, необхідних для реалізації різних систем керування з використанням мікропроцесорів та мікро-ЕОМ, ведуться практично в усіх країнах. Основними напрямками розвитку бортових систем керування мікропроцесора
та мікро-ЕОМ є:
- автоматизація керування рухом поїзда(автоведення);
- забезпечення безпеки руху;
- контроль та діагностика обладнання;
- керування тяговим приводом;
- керування обміном інформацією з постами централізації;
- керування допоміжним обладнанням і т.ін.;
Необхідно відмітити, що ефективне використання мікропроцесорів на ЕПС можливо у випадку використання універсальних відлагоджуючих комплексів, приладів оперативного запису та зміни програми, діагностичних комплексів, без чого достоїнства цих перспективних систем керування можуть бути викривлені.
Таким чином, інтенсивний розвиток мікроелектроніки дозволяє якісно змінити функції, які покладають на бортові СУ ЕПС, незалежно від принципів побудови тягового електропривода. При існуючому рівні розвитку схемотехніки необхідно вивчати необхідність використтання мікропроцесорів для кожного конкретного типу ЕПС.
Найбільш раціональним для ЕПС є багаторівнева побудова мікропроцесорних СУ. При цьому в ієрархічній структурі бортової СУ підсистема керування тяговим електроприводом представляє собою нижній рівень та забезпечує реалізацію пуско-гальмівних характеристик з урахуванням експлутаційних умов. При цьому доцільно виділення в підсистемі чотирьох характерних функціональних пристроїв: обчислювальні пристрої, призначені для вирішення задач, пов`язаних з питаннями реалізації заданих пуско-гальмівних характеристик з урахуванням обмежень; пррограмуємі логічні пристрої для формування процесу керування транспортними засобаби вцілому; основні програмуючі пристрої керування окремими блоками електроустаткування, в тому числі тиристорними перетворювачами; блоки контрольно-функціональної та оперативної діагностики.
З метою зниження числа міжпоїздних проводів, надійності системи керування обмін інформацію між окремими блоками системи керування та між періферійними пристроями доцільно здійснювати по мультиплексній лінії зв`язку.
При побудові мікропроцесорної СУ ЕПС з тиристорними перетворювачами з метою підвищення швидкодії системи доцільно застосовувати програмно-апаратний метод побудови СУ. При цьому на мікропроцесор покладається задача аналізу та обробки логічної інформації, а формування керуючих імпульсів перетворювачами – на апаратну частину.
З метою підвищення надійності роботи мікропроцесорних СУ ЕПС необхідно застосування оптоелектронних розв`язок по колу живлення, а також програмних методів захисту – надмірне кодування, контроль достовірності передаваємих сигналів, використання тестпрограм, контрольних кодів і т.ін.
Автоматизовані системи керування конвейєрними лініями
Всі типи апаратури автоматизації конвеєрних ліній, що серійно випускається мають вузьке цільове призначення. При цьому всі операції пуску і зупинки лінії виконуються автоматично.
Для автоматизації управління конвеєрними лініями серійно випускається апаратура АУК-10ТМ-68, ДУКЛ-2М, БИСУК-1.
Апаратура АУК-10ТМ-68 являє собою модернізований варіант апаратури АУК-10ТМ і призначена для управління нерозгалуженою стаціонарною і полустаціонарною конвеєрними лініями з числом конвеєрів в лінц не більше за 10 і контролю її роботи, У комплект входять блоки управління, пульт управління, датчики заштибовки, сирени, сигналізація ВСС-З, проводотримачі, прилад покажчик, блок кінцевого реле, кабельтросові вимикачі.
Апаратура ДУКЛ-2М призначена для автоматизованого управління з вантажного пункту розгалуженими стаціонарними і напівстаціонарними конвеєрними лініями, що мають один центральний напрям і до шести розгалужень із загальним числом конвеєрів не більше за 25.
Система автоматичного управління конвеерами фірми "МЕКО" (Англія).
Це обладнання дає можливість управляти системою, що складається з 12 конвеєрів (загальна довжина конвеєрної лінії до 6,4 км ), з одного центрального пункту.
Система дозволяє дистанційно вмикати і зупиняти конвеєри. Вона забезпечує подачу попереджувального сигналу перед включенням того або іншого конвеєра, забезпечена пристроєм для аварійної зупинки всіх конвеєрів відразу або оснащена двома паралельними системами зв'язку, що забезпечують у разі небезпеки або аварії швидкий контакг з відповідним персоналом. Управління може проводиться і незалежно від встановленого місцевим управлінням режиму чергування пуску конвеєрів.
Сигнали несправності і попередження поступають в центральний пункт, навіть коли конвеєр працює на місцевому керуванні.
В пульт управління і сигналізації поступає наступна інформація; який рід управління вибраний в даний час — місцевий або автоматичний; працює конвеєр або стоїть; по якій причині зупинився конвеєр; підвищення температури, буксування, обрив, зісковзування або зайнятгя стрічки; відмова конвеєрного замикача; аварійне відключення конвеєра обслуговуючим персоналом; попереджувальна сигналізація про підвищення температури, буксування або зісковзування стрічки.
Надходження інформації про зупинку конвеєра або виникнення аварійної ситуації супроводиться світловою і звуковою сигналізацією.
Обладнання складається з центрального пункту дистанційного управління і релейних блоків по одному на кожний конвеєр.
Всі релейні блоки взаємозблоковані і сполучені з пультом управління багатожильними кабелями, причому значно скоротилася кількість необхідних кабельних жил в порівнянні з іншими моделями.
Оператор програмує необхідні конвеєри за допомогою дозволяючих вмикачів, а також включає або вимикає окремі конвеєри.
Включення кнопкового перемикача першого конвеєра викликає на деякий час дію гудка цього конвеєра, Після закінчення цього часу перший конвеєр приходить в дію і, досягнувши робочої швидкості, замикає по блокуванню схему управління другого конвеєра, який при умові, що його сигнал дозволу позитивний, в свою чергу вступає в дію шсля попереднього звукового сигналу.
Цей процес повторюється автоматично до включення в роботу всієї системи конвеєрів.
Зелений світловий сигнал означає справність конвеєрів. Несправність означається жовтим сигналом попередження або червоним зупинки, що супроводять ся звуковим сигналом. Останній може бути включений диспетчером або оператором.
Спеціальні вимикачі дають оператору можливість визначити, який саме конвеєр викликав аварійний сигнал.
Крім центрального пульта управління, в системі автоматизації є місцеві блоки дистанційного управління.
Місцевий блок має ряд сигнальних і керуючих апаратів. Так аварія сигналізується світловим сигналом і гудком (останній може бути вимкнений), Спеціальні вимикачі дають можливість аварійному персоналу визначити, якої 3 датчиків автоматизації і контролю конвеєра викликав даний сигнал.
Блок забезпечений також пристроєм для посилки звукового попереджувального сигналу про майбутнє вимкнення конвеєра. Запам'ятовуючий пристрій забезпечує аварійну сигналізацію навіть при короткочасних несправностях. Ця пам'ять може бути вимкнена. У кожному блоці є вбудований пристрій для перевірки справності роботи апаратів.
У системі є викликаючий зв'язок по всій довжині конвеєрної лінії. Для повної безпеки зв'язок забезпечується ручною сигналізацією і телефоном зі звуковим сигналом, Обладнання має вбудовані випробувальні пристрої. Запам'ятовуючий пристрій забезпечує сигналізацію тимчасових або короткострокових аварій. Технологія обслуговування доступна електромонтеру. Конструкція пристроїв вимагає мінімального відходу.
Пристрій для управління конвеєрними лініями і контролю їх дії фірми "Контробелт" (Франція).
Основна мета пристрою спостереження за конвеєрними лініями і телеуправління ними з центрального пульта управління.
Однією з особливостей пристрою є те, що інформація передається за допомогою системи несучих струмів, для яких використовуються існуючі лінії енергетичного або телефонного зв'язку.
Система обладнана датчиками. Центральний пункт управління забезпечений телефонною безбатарейною мережею "Генефон" і пов'язаний з гучномовцями, У системі є оптична і акустична сигналізація; мнемонічне зображення лінії конвеєрів дозволяє стежити за станом її різних частин.
У системі забезпечений зручний перехід на "ручне управління" і виклик обслуговуючого персоналу за допомогою гудків і гучномовців.
Пристрій, що здійснює автоматичне телеуправління декількома лініями конвеєрів і великими лініями стрічкових транспортерів, що застосовуються на дільницях для откатки, складається з нормалізованих частин, що виконують одну або декілька функцій.
Головна перевага пристрою полягає в тому, що на основі певного комплекту нормалізованих елементів можна видозмінювати його склад в залежності від зміни дільниці, не звертаючись до допомоги висококваліфікованих фахівців.
Сигналізація при прослизанні стрічки конвеєра, покажчики перевантаження і т. п, не передбачені, але легко встановлюються у всіх існуючих моделях системи.
Поблизу кожного пускача, приводу або всередині цих пускачів встановлені передавачі сигналізації і приймачі телеуправління, а також апаратура живлення.
Один гудок, шахтний генефон або гучномовець також передбачені біля приводу.
Комплект «Контробелт» складається з різних постійних і змінних вузлів, розподілених таким чином: поблизу кожного приводу; вздовж конвеєрів; у диспетчера.
В диспетчерської контролю і телеуправління знаходиться пульт, на якому встановлена синоптична таблиця, що складається із знімних планок.
На таблиці зосереджені всі деталі, необхідні для спостереження і телеуправління: світлові покажчики, світлові стрілки, нажимні і ударні кнопки. Оскільки планки знімні, то синоптичну таблицю зручно видозмінити по мірі зміни обладнання. Один гучномовець постійно включений паралельно з генефоном в лінію, пов'язану з обслуговуючим персоналом, таким чином, передача здійснюється за бажанням генефоном або гучномовцем, Коли включається генефон, вимикається гучномовець. Передавачі, приймачі і живильні пристрої виконані на друкарських схемах з штепсельним з'єднанням елементів, їх число і розподіл можуть змінюватися в залежності від потреб експлуатації, Група затисків для зв'язку дозволяє при бажанні направляти всю або частина інформації на поверхню, наприклад для реєстрації. Може бути передбачений телеіндикатор рівня ізоляції мереж, один або декілька гальванометрів вказують цей рівень.
Для передачі інформації використовуються прості передавачі, які працюють на частоті 15, 150 кгц. або шестиполосні передавачі.
Взаємне блокування конвеєрів проводиться прямим проводом (одного з жил телефонного зв'язку), що йде від одного приводу до вищестоящого, або шляхом ущільнення лінії несучими струмами.
Припинення взаємного блокування здійсщоється з пульта управління за допомогою єдиної кнопки реверсуючого вимикача, Про це сигналізують світлові покажчики на пульті, і, якщо це нео бхідно, на пускачах, розташованих у приводів.
При будь-якій аварії на пульті передається акустичний сигнал або загоряється лампа, повідомляючи про виникнення аварії і її причину, наприклад: перевантаження, ковзання стрічки, відсутність напруги пускача, екстрена зупинка.
Акустична сигналізація може бути вимкнена диспетчером при виконанні маневру "квитація" Якщо працювала блимаюча лампа, "квитація" викликає перехід на постійне 1ї свічення до усунення аварії.
Квитіровані на час аварії сигнали можуть бути за бажанням відновлені.
Пристрій для автоматизованого управління конвеєрними лініями фірми 'СИМЕНС-ШУККЕРТ" (ФРГ).
Фірма «Сименс-Шуккерт» (Ерланген) розробила конструкцію стандартної апаратури управління стрічковими конвеєрами, яку можна застосувати разом з енергоустаткуванням, що вже є. Апаратура управління складається з блоку живлення, комутаційного реле і блоків конструкції «Симатік» з штепсельними контактами.
Схема автоматизованого управління конвеєрною лінією використовується для аварійного ручного управління без застосування контрольної апаратури.
За допомогою перемикача подається напруга на апаратуру управління відповідного конвеєра. Для того щоб струм, що проходить через контакти сигнальних пристроїв, не перевищував мінімального значення, передбачені потенціометри; опори захищають електронні пристрої від впливу місткості.
В командоапарат, крім кнопок «пуск» і «стоп», вмонтований багатопозиційний перемикач, який дозволяє управляти окремими конвеєрами або всією конвеєрною лінією автоматично або вручну. Якщо потягнути за шнур аварійного натяжного вимикача (в будь-якому місці по довжині конвеєра), відключається один з конвеєрів, а у разі автоматизації всі конвеєри. Відключення запам'ятовується, Повторне включення лінії можливе лише після підтвердження вимкнення кнопкою «стоп». Рівень завантаження конвеєра контролюється вимикачем з датчиком. Для контролю пробуксовки і обриву стрічки в апаратуру управління вмонтований блок, принцип дії якого засновавий на порівнянні тривалості спрацювання ланки витримки часу з часом зупинки конвеєра, Як датчик використовують безконтактний кінцевий вимикач «Беро», Для контролю швидкості можна використати також механічні датчики.
Вся розглянута апаратура дозволяє лише здійснювати пуск конвеєрної лінії, її останов, а також вимкнення при наявності аварійної ситуацц, але не дозволяє здійснювати управління швидкістю за вхідним вантажопотоком, технічним станом вузлів конвеєра тощо.
Мікропроцесорні засоби керування
При вирішенні питань правильного вибору мікропроцесорних засобів необхідно ураховувати наступні фактори:
• показники вартості;
• функціональні можливості;
• можливість отримання технічної інформації про техніку, що купується;
• наявність спеціалістів, що готові працювати з цією технікою.
Виходячи з цього можна сказати, що фірма "Schneider Electric" — одна з небагатьох закордонних фірм на Україні, що найбільш повно відповідає цим вимогам, Цей висновок виходить з наступного:
• технічна продукція фірми в галузі керуючої мікропроцесорної техніки відповідає самим передовим міжнародним стандартам та входить в трійку провідних фірм, що працюють в цьому напрямку; мається широка номенклатура мікропроцесорних контроллерів та допоміжних приладів до них, котрі дозволяють створювати системи різної складносп та задовольняти різноманітні вимоги користувачів;
• продукція фірми має оптимальне співвідношення ціна і функціональні можливості;
• фірма проводить відкриту технічну політику, в результаті якої користувач має можливість отримати технічну інформацію та консультації по тим питанням, що викликають інтерес;
• фірма багато витрачає зусиль на організацію навчання потенційних користувачів.
Отже, можна зробити остаточний висновок про доцільність використання обладнання фірми " Schneider Electric ".
Критеріями вибору моделі програмованого логічного контроллера є:
• об'єм данних;
• кількість каналів вводувиведення для підключення датчиків;
• розвинені комунікаційні засоби.
Враховуючи ці критерії доцільно застосування контролерів TSX Micro фірми Modicon, моделі – TSX 37-10.
TSX Micro:
– Конец работы –
Эта тема принадлежит разделу:
Конспект лекцій "автоматизації електричним транспортом"
Криворізький технічний університет... Кафедра автоматизованого електропривода... Конспект лекцій автоматизації електричним транспортом для студентів спец...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Конспект лекцій
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.035 сек.
Новости и инфо для студентов