рефераты конспекты курсовые дипломные лекции шпоры

Реферат Курсовая Конспект
T1, t2 – t3, t4 – t5, t6 – t7.
T1, t2 – t3, t4 – t5, t6 – t7. - Конспект, раздел Философия, Конспект лекцій "автоматизації електричним транспортом" Прискорення αЗмінюється По Трапецієдальному Закону На Д...
Прискорення αзмінюється по трапецієдальному закону на ділянках
0– t3і t4 – t7.Швидкість υмає параболічні ділянки при зміні прискорення руху.
Розглянута діаграма являється оптимальною, якщо перехідні процеси вдається здійснити за мінімально можливий час, так як на всіх стадіях перехідного процесу там, де це можливо, підтримуються постійними придiльно допустимими значеннями ривків і прискорень. Однак на практиці в точності реалізувати такий графік руху важко.
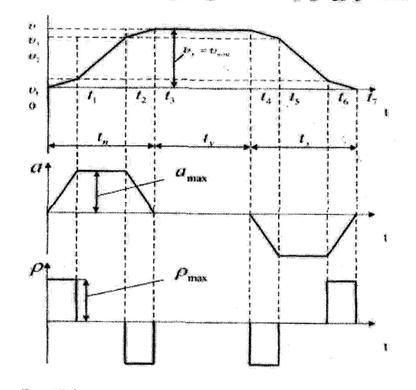
Рис.1.2 Оптимальиа діаграма руху кабіни ліфта
Мікропроцесорна система управління ліфтом.
Системи управління ліфтами виконуються із застосуванням релейно-контактної апаратури, безконтактної логіки і мікропроцесорної техніки. Перші два рішення в даний час практично не реалізуються, тому розглянемо побудову мікропроцесорної системи управління на прикладі ліфта фірми «Оtis».
Система управління на базі контроллера МСS 220 (МСS 300) з управляючою платою LСВ-П виконана по модульній схемі (мал. 4.128) і включає наступні підсистеми: ОСSS-операційного управління, МСSS - контролю руху, ОBSS - управління основним приводом і гальмом DCSS— управління приводом дверей.
Модулі забезпечують виконання системою управління певних функцій. Логічна платня LСВ-П спроектована для СУ ліфтами в будівлях великої поверховості (до 32 поверхів) і типів приводу з максимальною швидкістю до 1.75 м/с Система МСS - LСВ-П може застосовуватися в сімплексному (один блок), дуплексному (два блоки) і тріплексному (три блоки) виконаннях.
Підсистеми ОCSS і МСSS об'єднані платнею LСВ-П, яка має два незалежні канали дистанційної послідовної лінії RSL передачі даних. Основу плати складають: процесор Intel-8088 з тактовою частотою 8 Мгц "EPRОМ 128 Кбайт ЕЕРROM 8 Кбайт RАМ З Кбайт з живленням від батареї напругою 3 В; пристрій послідовного введення і висновку(частота 6 Мгц); 13-сегментний індикатор.
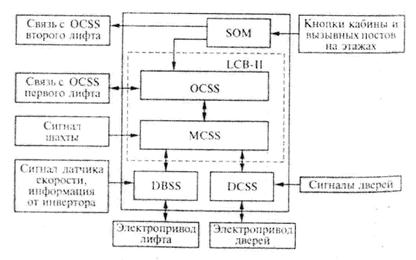
Рис.1.3
Модулі мікропроцесорної СУ сполучені один з одним послідовними лsнsями передачі даних. Кнопки наказів, викликів, сигнальні лампи, показчики напряму руху, індикатори поверховості і додаткові ключі і підключаються до видалених станцій, розташованих на зупинних майданчиках і в кабіні.
Зв'язок між контролером і видаленими станціями здійснюється по послідовній лінії передачі даних. Така конфігурація системи забезпечує просту установку, виявлення, заміну несправних компонентів, а також захист від доступу в систему сторонніх. Вся системна інформація і сигнали системи можуть стати доступними тільки після підключення блоку обслуговування.

Рис.1.4
Роботу ліфтів в групі забезпечує спеціальний блок SOM здійснюючий зв'язок між єдиною на два ліфти віткою визиваючи постів взаємопов’язаними підсистемами OCSS ліфтів.
На рис. 1.4 представлена схема розміщення пристроїв контролю ліфта. Основна плата управління встановлена в шафі контролера. Послідовна лінія передачі даних (RSL) підрозділяється на канали кабіни і шахти. Канал кабіни, до якого підключена клемна коробка кабіни, є підвісний кабель. На рис. 1.4 прийняті наступні позначення:
7 – шафа контролера, 2 – позиційний індикатор, 3 – поверхові кнопки, 4 – датчик положення.
На рис. 1.5а представлена схема розміщення датчиків в кабіні (1LV, 2LV – датчики точної зупинки; IPU, IPD – датчики уповільнення при русі відповідно вгору і вниз; 1LS,2LS – кінцеві датчики), а на рис. 1.5б – магнітних шунтів в шахті ліфта.

Рис.1.5
Датчики положення, дверні контакти і двигун електроприводу дверей підключаються до дискретних входів плати LCB-П через підвісний кабель. Блок обслуговування ST (Service Tool) використовується при монтажі і обслуговуванні для програмних областей управляючої плати.
До спеціальних модулів контролера МСS 22О поступають наступні сигнали:
- від датчиків положення:
- дверної зони,
- уповільнення при русі вгору /вниз),
- режиму дотягування кабіни до рівня (рельовлінга) вгору(вниз);
- від ланцюга безпеки:
- режиму інспекції,
- контролю ланпюга безпеки,
- контролю дверей шахти,
- контролю кабіни, руху вгору(вниз) в режимі інспекції (управління з даху кабіни за допомогою консолі);
- до інтерфейсу:
- «Вгору»,
- «Вниз»,
- двері відкриті(закриті),
- малої швидкості,
- великої швидкості,
- заборони на відкриття дверей.
До складу системи управління входять постійні модулі і модулі, встановлювані за замовленням.
Режими роботи ліфта.
Режими роботи ліфта задаються. програмно - вибором версії програмного забезпечення ЕРRОМ і внесення необхідних даних при програмуванні ЕЕРRОМ; апаратно - установкою необхідних для активації певного режиму перемикачів,
ключів, пультів управління або датчиків. Система управління на базі контролера забезпечує виконання різних режимів роботи ліфта.
У режимі навчання СУ визначає місцеположення кабіни в шахті. Під час повільного проходу на шахті перевіряється узгодженість основних точок розташування контактів шахти; їх точні координати записуються в постійний пристрій, що запам'ятовує.
У режимі нормальної роботи (NОR) при одиночній системі управління G1C здійснюється просте змішане управління (SАРВ) ліфтом з кабіни і з посадочних майданчиків, а при замовленні – з виконанням попутних викликів (збірна система при русі вниз - модуль DCL, при русі в обох нaпрямaх - модуль FCL). Вільна кабіна з закритими дверима залишається в очікуванні виклику на тому майданчику, на якому вона була зупинена останнім пасажирам, але через заданий в програмі контролера час кабіна може послідкувати на основний посадочний майданчик будівлі модуль ARD). При роботі двох ліфти в парі (групова система управління G2С - дуплекс) на виклик відповідає та кабіна, для якої розрахунковий час прибуття на виклик виявиться менше.
У режимі ревізії (ТС1) управління ліфтам проводиться тільки з поста ревізії на даху кабіни від кнопок «Вгору», «Вниз» і «Стоп». При цьому виключена дія: визивних кнопок з поверхів (НВМ) і кнопок наказу з кабіни; ключів перемикачів управління на режими парковки (PKS), виклику на спеціальний поверх (СТL1) і незалежного обслуговування (ISС1); управління з машинного приміщення (режим MRM).
Рух кабіни в режимі ревізії проводиться тільки на малій швидкості, обмежується кінцевими вимикачами і можливо лише при повністю закритих дверях кабіни і шахти.
При роботі з машинного приміщення виключені всі виклики, накази і робота дверного оператора.
Режим аварійного переміщення кабіни (ER0) дозволяє за допамогою електродвихуна лебідки знімати кабіну з ловців або кінцевих вимикачів. Режим вводиться вимикачем DBS, розташованим на виносному блоці управління ЕRО, постійно підключеному до контроллера. Управління здійснюється кнопками «Вниз» і «Вгору» на блоці ЕRО. При цьому кабіна рухається на малій швидкості, при торканні кабіною траверси на верхньому кінцевому вимикачі вона може рухатися тільки вниз, при знаходженні кабіни на нижньому кінцевому вимикачі вона може рухатися тільки вгору.
Режим тестових прогонів ТЕSТ) використовується для обкатки ліфта, перевірки його роботи (правильного функціонування ліфта, реєстрації відмов і збоїв), локалізації дефектних місць, завдання програми роботи ліфта для контролера або зміни раніше закладеної програми.
Для активізації режимів використовується спеціальний блок обслуговування програмно діагностичний прилад Serviсе Тоо1 9693 В1.
Блок обслуговування реєструє всі відмови (збої), які виникли з моменту подачі напруги на ліфт, указує на дисплеї час, що пройшов з моменту останньої відмови, число відмов.
Виконання режиму автоматичного повернення (ARD) може бути закладено в програму контролера як опція за замовленням споживача. Активація режиму забезпечується програмою тільки при включенні ліфта в режим нормальної роботи. В цьому випадку вільна кабіна через заданих в програмі час приходитиме на заданий програмою майданчик або у разі групового управління зупинятися там із закритими дверима в очікуванні виклику.
Перемикання ліфта в режим парковки (СРК) можливе тільки з режиму нормальної роботи і здійснюється ключом управління на одному з посадочних майданчиків (модуль РКS).
При активації режиму кабіна, виконавши всі накази, приходить на посвідочний майданчик, заданий програмою, і стоїть там з відкритими або закритими (модуль СРR) дверима в залежності від заданої програми.
Перемикання ліфта в режим незалежного обслуговування (ISС1) проводиться ключем управління в кабіні. У цьому режимі відбувається відключення будь-яких зовнішніх викликів кабіни, ліфт виконує тільки накази з кабіни і стоїть на посадочному майданчику з відкритими дверима в очікуванні інших наказів. У режим пожежної небезпеки (ЕFО) ліфт повинен переходити автоматично під час вступу сигналу з системи пожежного захисту будівлі або від спеціального ключа на одній з посадочних майданчиків. Перехід в режим ЕFО здійснюється для всіх режимів роботи ліфтів, окрім режимів ревізії і аварійного переміщення кабіни.
Якщо у момент включення режиму ЕFО кабіна рухалася вгору, то кабіна повинна дійти до зони точної зупинки найближчою посадочного майданчика і, не відкриваючи дверей, попрямувати вниз на основний посадочний майданчик і поверх з виходом на вулицю), не зупиняючись і не реагуючи на накази і виклики. На цьому посадочному майданчику кабіна повинна стояти з відкритими дверима.
При знаходженні кабіни на проміжному посадочному майданчику і при включенні режиму ЕFО вона повинна автоматично відправитися на основний посадочний майданчик аналогічно описаному вище.
На спеціально обладнаних ліфтах після спрацьовування режиму ЕFО від ключа в кабіні включається режим перевезення пожежних підрозділів (ЕFS). При цьому управління ведеться від кнопок в кабіні. Помилкові команди знищуються разовим поворотом ключа на перемикачі пожежника обслуговування в положення ОГГ (виключення).
Двері закриваються тривалим натисненням кнопки виклику. Після прибуття на поверх кабіна зупиняється із закритими дверима. Двері відкриваються після тривалого натиснення кнопки відкриття дверей. Двері вмить закриваються знов, якщо кнопка відпущена до того, як двері відкриються повністю. Відкрившись, двері залишаються відкритими.
Режим землетрусу (EQO) включається від спеціального ключа на одному з посадочних майданчиків або від сейсмодатчика, що має електричний зв'язок з контролером ліфта. При цьому кабіна повинна зупинитися на найближчому посадочному майданчику і стояти там з відкритими дверима.
Система управління передбачає відміну попутних викликів при русі кабіни вниз(вгору) за умови, що кабіна завантажена більш ніж на 80% вантажопідйомності (модуль LNS C). Kабіна забезпечена вантажозважувальним пристроєм, що не допускає пуск ліфта у разі його перевантаження на 10,% вищий номінальною (модуль OLD С), При завантаженні кабіни масою 100-150 кг система управління відміняє накази з кабіни, якщо їх зробити більше N (Встановлюється програмно, Звичне N = 3) (модуль АNS).
Функції підсистем CУ.
Підсистема операційного управління ОСSS взаємодіє з підсистемою МСSS, а в випадку групового управління — з іншими ОСSS групи через послідовний зв'язок.
Ця підсистема виконує наступні функції:
- отримання команд з кабіни або з поверху;
- видача команди на рух в підсистему МСSS:
- управління індикацією напряму руху і положення кабіни;
- отримання інформації від інших підсистем ОСSS групи.
Підсистема містить в пам'ять адреси видалених станцій, параметри їх входів і виходів, а також інші параметри і режими роботи ліфта, які встановлюються на заводі-виготівнику, але можуть бути змінені на місці монтажу.
Підсистема контролю рухом МСSS є елементом модульної системи управління ліфтом. Ця підсистема з'єднується через послідовний зв'язок з наступними підсистемами:
- оперативного управління ОСSS;
- приводу дверей DCSS;
- управління приводом s гальмом;
- ліфта DBSS.
Програмне забезпечення підсистеми МСSS призначено для видачі команд, в підсистему управління приводом і гальмом DBSS, необхідних для управління рухом кабіни ліфта за заданою програмою після запиту, що поступає від операційної підсистеми управління ОСSS і від різних інтерфейсів ручного управління.
Ця підсистема подає команди в інтерфейсу підсистему приводу дверей дверному оператору на переміщення дверей після запиту, що поступає від ОСSS.
Підсистема МСSS виконує наступні функції:
- управління рухом:
- управління послідовністю логічних станів руху,
- забезпечення функцiй підготовки до руху і корекції по висоті,
- генерація графіків розподілу швидкості прискорення,
- забезпечення управління гальмом електроприводу в
процесі нормальної роботи,
- визначення гальмівного шляху і точки зупинки,
- передача інформації про стан кабіни в підсистему ОСSS;
- визначення положення:
- визначення швидкості. і напрями переміщення кабіни,
- параметрів абсолютного положення,
- положення кабіни по відношенню до наступного заданого поверху,
- незалежне визначення положення кабіни для забезпечення нормальної зупинки на кінцевих посадочних майданчиках в нормальному режимі режимі аварійного обмеження швидкості;
- забезпечення безпеки:
- забезпечення поточного контролю за пристроями безпеки і екстреного гальмування,
- гарантування безпеки при роботі дверей і виконанні операцій в зоні дверей,
- гарантування безпеки при зупинці,
- визначення режимів управління рухом;
- установка і технічне обслуговування:
- поточний контроль даних,
- введення настановних параметрів,
- реєстрація подій,
- діагностика.
Для відстежування кабіни в шахті застосована двох трекова система стеження (мал. 4.131). Один трек відповідає за рух вгору, а інший - вниз. На кожному поверсі встановлюється пара магнітів.
Система побудована на базі датчиків з магнітоуправляючими контактами (герконов), що герметизуються, встановлених на кабіні, які видають сигнали в підсистему МСSS. На кабіні встановлюється дві пари таких датчиків.
Датчики 1LV і 2LV сполучені послідовно і видають сигнал DZ (зона дверей).
Підсистема МCSS здатна генерувати профілі розподілу швидкості в наступних межах з швидкість О. 2,5 м/с; прискорення 0,01 .1,2 м/с^2 ривок 0,01 .2,4 м/с^3.
Підсистема управління приводом і гальмом DBSS призначена для забезпечення управління рухом кабіни ліфта після надходження команд від підсистеми управління рухом. DBSS виконує наступні функції:
- сполучення з лебідкою,
- управління гальмом,
- сполучення з шифратором швидкості РVТ,
- сполучення з підсистемою МСSS,
- точне відстежування заданого профілю розподілення швидкості,
- незалежна перевірка швидкості.
Ця підсистема, будучи системою частотного регулювання швидкості асинхронного електроприводу на основі ШИМ, має фірмову марку ОVF 20 (Otis Variable Frequence) і складається з двох основних вузлів - управляючої плати МСВП і силової частини.
Функцюнальна схема ОVF 20 представлена на мал.1.6. Силова частина складається з схеми підключення до електричної мережі і перетворювача, що складається з некерованого трифазного двохпівперіодного випрямляча, лінії зв'язку по постійному струму і трифазного інвертування.
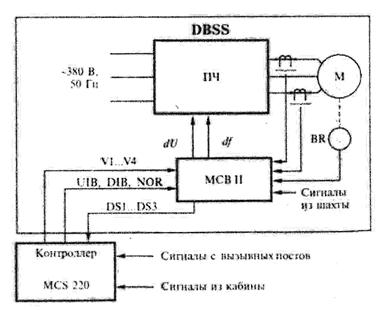
Рис.1.6
Комутації IGBT-транзисторів перетворить напругу постійного струму за допомогою ШИМ в трифазну змінну напругу із змінною частотою. Транзистори забезпечують високу швидкість перемикання (з несучою частотою 10 кГц).
Інформація про вихідні значення приймається з датчика швидкості ВК, що знаходиться на валу електродвигуна.
Застосовується двоканальний (трековий) енкодер із зсувом фаз сигналів на 90 електричних градусів GBА6ЗЗА1 (по 1024 імпульси на кожний трек). Контроллер МСS 220 обімнюється сигналами з ОVF 20 (сигнал управління V1. У4 кодований чотирма бітами; UIВ, DIВ, NOR - сигнали, кодовані одним бітом кожний; сигнали поточного стану ліфта DS1 .DS3, кодовані трьома бітами). Сигнали , UIВ, DIВ, NOR є даними, що визначають початковий стан системи OVF 20 перед роботою, тобто ліфт працює в режимі навчання «вгору-вниз» або у нормальному режимі.

Рис. 1.7.
Замкнутий контур контролю швидкості гарантує точну і комфортну поведінку приводу в кожний момент роботи. Зміряна швидкість електродвигуна вводиться в регулятор швидкості типу ПІ-регулятора.
Динамічна точність регулювання швидкості (час усунення системою регулювання помилки по швидкості) висока.

Рис. 1.8
Система забезпечує режим рекуперативного гальмування електродвигуна. Енергія, що виділяється, розсівається в ланці постійної напруги на гальмівному резисторі, який підключається через транзистор що входить в конструкцію інвертування і резистор має зовнішнє підключення до перетворювача частоти.
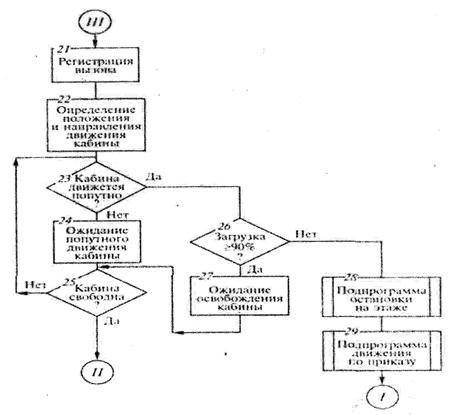
Рис.1.9
Алгоритми управління рухом ліфта.
Алгоритми управління реалізують роботу ліфта в різних режимах.
Алгоритм роботи системи управління складається з основного алгоритму, алгоритму підпрограм, що реалізовують різні режими роботи системи управління (ревізії, деблокування, управління з машинного приміщення, нормальної роботи, пожежної небезпеки), і алгоритмів додаткових підпрограм, реалізовуючи типові дії, вироблювані в режимі нормальної роботи (рух ліфта за наказом, зупинка кабіни на поверсі).
Схема алгоритму основної програми роботи ліфта приведена на мал. 1.7. Алгоритм починається з включення ліфта в роботу (блок 7), після чого починається постійний контроль ланцюги безпеки (2). Якщо ланцюг розімкнений, відбувається аварійна зупинка ліфта (3). Залежно від причини аварійної зупинки або застосовується режим деблокування (5), якщо кабіна ліфта встановилася на ловпі або кінцеві вимикачі, або проводиться визначення і усунення іншого роду збо7в в системі (6). Блоки 7 . 9 визначають необхідність включення того або іншого режиму роботи ліфта, блоки 10 . 12 реалізують відповідні підпрограми. Програма продовжує свою роботу до тих пір, поки не буде виконана примусова зупинка ліфта. схема алгоритму підпрограми, що реалізовує режим нормальної роботи, приведена на мал. 1.8, 1.9. В цьому режимі проводяться контроль пожежної безпеки (7, 2), реєстрація і виконання всіх викликів і наказів, контроль завантаженості кабіни. Цей алгоритм складений з урахуванням роботи системи із збірним управлінням вниз, тобто виконуються попутні виклики при русі кабіни вниз (якщо завантаження менше 90% номінального).
Таким чином, в підпрограмі реалізуються очікування і реєстрація виклику (3, 4), перевірка знаходження кабіни ліфта на поверсі виклику (5). Залежно від цього здійснюється відкриття дверей кабіни 3 подальшою роботою Ліфта за наказом (6, 7) чи перевіряється умова зайнятості кабіни (8). Якщо кабіна вільна, то блоки 9, 20 здійснюють вибір напряму руху кабіни і залежно Від цього після отримання наказу виконуються попутні виклики при русі вниз якщо вони зареєстровані) (14. 20) або рух кабіни на щонайвищий з поверхів, з яких поступили виклики, а потім після отримання наказу збірне управління для руху вниз.
Якщо при реєстрації виклику кабіна зайнята, виклик виконується при попутному проходженні кабіни за умови, що вона завантажена менш ніж на 90 % номінального завантаження.
В осоружному випадку чекають, поки кабіна не звільниться або не пройде в попутному напрямі, завантажена менш ніж на 90% (21 .29).
Контрольно-вимірювальні прилади, регулятори і апаратура управління.
В залежності від швидкохідності пасажирських ліфтів прийняті наступні різновиди силових схем керування ними: тихохідні ліфти мають двигуни з короткозамкнутим або фазним ротором і кнопкове або важільне керування, швидкохідні ліфти - дво або одно швидкісні двигуни. керовані магнітними станціями або тиристорними станціями керування(ТСК- Р) з кнопковими командуючими приладами; швидкісні і високошвидкісні ліфти – двигуни постійного струму, керовані по системі «генератор - двигун з різними схемами збудження або по системі тиристорний перетворювач - двигун» з кнопковими командуючими приладами: можуть використовуватись також схеми асинхронно-вентельних каскадів(АВК), застосування яких дозволяє збільшити к.к.д. установки.
Пасажирські ліфти в залежності від пасажиропотоку, висоти підйому і кількості ліфтів які обслуговують пасажирів, поділяються на одиничні і з груїшвни керуванню. До одиночних відносяться:
а) ліфти, працюючі на одиничних командах і викликах без попутних зупинок при опусканні і підйомі пасажирів;
б) ліфти зі збиранням пасажирів при спусканні, але із забороною викликів при підйомі;
в) те саме, але з регістрації викликів на спусканні. з послідуючим їх виконанням.
До ліфтів з груповим керуванням відносяться:
а) ліфти з одною кнопкою виклику на посадочних ділянках незалежно від кількості встановлених ліфтів (частіше використовується парне керування) і зі збиранням пасажирів при опусканні;
б) те саме, але з повним збиранням пасажирів на проміжних поверхах на підйом і спуск (зазвичай встановлюються в адміністративних, навчальних та інших будівлях).
Крім цього, в зв'язку зі збільшенням кількості пасажирських
ліфтів стала використовуватись диспетчеризація ліфтів ряду будинків і цілих районів, коли з одного диспетчерського пульта виконується контроль стану схем виконується керування декількох ліфтів.
Незалежно від швидкохідності ліфтів, одиничного або групового керування ними необхідними елементйми бiльшості їх схем являються слiдкуючи: кнопки з самоповерненням, залипаючі або западаючі кнопки для виклику і подачі команди з кабіни - різноманітні датчики селекції точної зупинки — позиційно узгоджуючi пристрої (ПУП) для регістрації місця знаходження кабіни і стану, електричних кіл; датчики і блокування стану підйомних канатів, стану дверей шахти і кабіни (відкриті чи закриті); кінцеві вимикачі обмеження швидкості і степеня завантаження кабіни; показники напрямку руху кабіни в деяких ліфтах наявність вантажу в кабіні. Із перерахованих елементів більш докладно зупинімось на ПУП, які позначають місце де має зупинитись кабіна в шахті при появі виклику або команди і руху її вверх або вниз. Решта елементів зазвичай представляє собою різноманітні модифікації кінцевих вимикачів, відомих із інших курсів.
Конструктивно ПУП виконують у вигляді набору трьох позиційних електромеханічних або індивідуальних магнітних(геконових) датчиків, розміщених в шахтах, з виводом сигналів на релейний або безконтактний селектор або копірприлад в машинному приміщенні (ПУП деколи виконують у вигляді центральних поверхових приладів, розміщених в машинному приміщенні).
Датчики, розміщені в шахті, взаємодіють зі встановленими на кабіні виводамн (при електромеханічних) або магнітними шунтами (при індуктивних або герконових датчиках) і видають сигнали до центрального поверхового приладу (кроковий копірнрилад або релейний селектор), встановлений в машинному приміщенні, а останній передає в схему керування сигнал на виконання отриманої команди. Датчики сигналів про рух кабіни вверх або вниз доцільно розміщувати на кабіні (використовується менше проводів), а магнітні шунти встановлювати в шахтах в потрібних точках. В цьому випадку при цифровому керуванні число стовпців, встановлюючих шунтів по шахті, рівне числу розрядів передаючого номера поверху в двійковому або іншому коді.
Трьохпозиційні електромеханічні перемикачі фігурного виводу переводяться в одне з положень, відповідаючи рухові кабіни вверх або вниз, або її зупинки. В цьому випадку при русі кабіни контакти перемикачів пройдених поверхів вмикаються в один в крайніх режимів, підготовлюючи до дії кола викликів і команд, а при зупинці кабіни перемикач переводиться в середній режим, відключаючи коло керування від контакторів напрямку і виключаючи тим самим відхід кабіни з поверху при помилковому натисненні кнопки виклику або команди.
Для забезпечення відносно точної зупинки кабіни ліфта, в схемах керування ними останнім часом стали використовувати безконтакні індуктивні (наприклад, типу ІКВ - 22) або контактні герметичні магнітокеровані (герконові) датчики (наприклад, типу ДПЄ – 101).
Ці датчики встановлюють як в шахті, так і на кабіні: в шахті - датчики селекції (заземлення), а на кабіні - датчик точної зупинки. Для взаємодії з датчиками, на кабіні розташовують феромагнітний шунт селекції; а в шахті (па кожному поверсі)- феромагнітні шунти точної зупинки.
Індуктивні датчики складаються з розімкнутого 11 - подібного магнітопроводу з котушкою, поміщеною в кожух, послідовно з нею вмикається котушка виконавчого реле, і на них подасться напруга змінного струму. При розімкнутому манітопроводі магнітний потік, який перетинає котушку малий.
Тому е.р.с. і струм самоіндукції в провідниках котушки, а також обумовлений ним індуктивний опір практично відсутні, так що опір котушки носить активний характер.
Струм в послідовно включених котушках відносно великий:

він як би імітує замикання контактів в контактній системі (реле вмикається).
Розрахунок механізму підйому ліфта.
По прийнятій в ліфтобудуванні термінології розрахунок механізму підйому називається тяговим, Він включає три характерні частини: статичний і кінематичний розрахунки; динамічний розрахунок; розрахункове обгруитування форми профілю канавки обода КВШ.
Початковими даними тягового розрахунку є:
- призначення і кінематична схема ліфта;
- вантажопідйомність,
- основні розміри і швидкість кабіни,
- маса кабіни;
- конструкція дверей,
- маса 1м шдвісного кабелю;
- розташування противаги в плані шахти;
- розташування машинного приміщення;
- число зупинок і висота підйому кабіни;
- режим роботи ліфта (ПВ, %).
Мета статичного і кінематичного розрахунків полягає в обґрунтуванні параметрів і виборі вузлів і деталей механізму підйому ліфта без урахування дії інерційних сил, тому потрібне подальше коректування за наслідками динамічного розрахунку.
Розрахунок включає обґрунтування параметрів тягових канатів, розрахунок маси і урівноваження рухомих частин ліфта, розрахунок опор і переміщення рухомих частин ліфта.
Мета динамічного розрахунку - визначити інерційні і силові характеристики механізму підйому, що гарантують забезпечення допустимого рівня прискорень і точності зупинки, довговічність і надійність роботи механізму підйому.
Одним з чинників, що визначають вибір приводного двигуна по потужності, є кінематична схема ліфта, що є схемою взаємодії підйомного механізму з рухомими частинами ліфтів - кабіною і противагою. Розглянемо розрахунок потужності електродвигуна для традиційної кінематичної схеми ліфта, приведеної на рис. 1.2.
За відсутності врівноважуючих канатів, тертя кабіни і противаги спрямовуючи розрахунок може бути вироблений в наступному порядку.
1. Визначають зусилля F1 і F2 в канатах по обидві сторони КВШ:
– Конец работы –
Эта тема принадлежит разделу:
Конспект лекцій "автоматизації електричним транспортом"
Криворізький технічний університет... Кафедра автоматизованого електропривода... Конспект лекцій автоматизації електричним транспортом для студентів спец...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: T1, t2 – t3, t4 – t5, t6 – t7.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.025 сек.
Новости и инфо для студентов