Причини появи КС
Причини появи КС
2причина – підвищення продуктивності роботи. Вимірюють продуктивність у флоксах. Flops-число речових і дійсних операцій, які виконує комп’ютер в… 3причина – робота в режимі реального часу Основні ознаки за якими можна класифікувати (порівнювати ) КС.За часовим режимом роботи
А) оперативний режим (онлайн) – реальний час
Б) неоперативний режим (офлайн)
10) За методом доступу до ресурсів каналів зв’язку та інше:
А) колективного користування
Б) корпоративно – колективного користування
В) корпоративно індивідуального користування
11) За ступенем мобільності
А) стаціонарні нерухомі
Б) мобільні рухомі
12) За можливістю впливу на навколишнє середовище
А) закриті непов’язані з зовн. Середовищем
Б) відкриті системи системи
В) відкриті впливаючі
За впливом людини
А) неавтономні кс
Б) автономні кс
За будовою
А) багатопроцесорні
Б) багатомашинні
Обговорення загальних методів підняття продуктивності системи
Є два методи
1) Метод паралельної роботи (паралелізація)
2) Метод конвеєризації роботи (конвеєризація)
Розглянемо простий приклад Мур Фокса (1987р)
Розглянемо задачу побудови Мура.
Мур Фокса
Один працівник для побудови мура витрача Т годин. Питання: Скільки часу треба для 4 робітників . Для кожного ясно що відповідь не дорівнює Т/4. Для… Метод 1 Конвеєрне розв’язання Вся робота поділяєть між робочими горизонтально кожен робітник будує тільки один ряд цегли, при цьому всі вони можуть…Системи класу ОКОД
Гарвардська архітектура: ПК-пристрій керуваня АЛП- арифм. Лог. ПристрійПерший закон мура.
2. Закон Рока (Артур Рок ) Вартість основного обладнання для створення напівпровідникови х пристроїв буде подвоюватись кожних 4ри роки . 3. Другий закон Мура (1995) Капітальні витрати збільшуються на багато скоріше… Темп технологічного прогресу буде визначатись фінансовим показником . За останнє десятиріччя науковцям та інженерам…Тактова частота
Інтел – 3,6 гігагерц – найбільше серед інтел є єдине виключення .Тільки ІБМ продовжує спроби (і робить ) збільшує тактову частоту : Z196 – 5,2 найпіздатий. – технологія щільності 45 мм . енергоспоживання тобто… Система класу ОКОД РІСК ЦІСКЗагального призначення
Тип регістора – 128
Кількість регістрів – 128
Розмір біт – (64+1) біт
Функції – Програмісту доступні 64 біта, додатній біт Nat (Not a Thing)-показує придатність інформації, яка записана в регістрі.Якщо дані признані непотрібними(наприклад у результаті невірного передбачення гілкування), то змінюється тільки Nat.Це дає істотний виграш у часі,так як не вимагає стирання даних в регістрі і доповняльної обробки.
Рухома кома
Кількість регістрів – 128
Розмір біт – 82 біт
Функції – Використовується для обчислення з рухомою комою.
Предикативний
Кількість регістрів – 64
Розмір біт – 1 біт
Функції – контролює умови виконання інструкції та гілкування
4)Гілкування
Кількість регістрів – 64
Розмір біт – 64 біт
Функції –Вказує адреси гулок програми
Ітаніум мав три рівні кеша!!
Передбаченння гулкування
Базується на аналізі компіляторів програми, яка виконується.Після чого компілятор приймає рішення, які з гілок потрібно прорахувати, а які ні.
Припущення
ІНТЕЛ сказав так – «Архітектура ІА-64 є стратегічним напрямком на найближчі… Ітаніум 2 – 2005 рік, який мав 1,72 млрд транзисторів , частота 1,7 Ггц , тех. процес 90нм – щільністьSMP
Для підвищення швидкості в режимі симетричного мультиплексора використовується кеш Л4, і він має обсяг всього 192 мб , взаємодія з яким відбувається зі швидкістю 40ГБ/сек.
NB
Цей процесор був розроблений до мейфреймів z eterprize (2010 рік)
В чіпах вирішуються питання для сучасних потужних мікропроцесора – збільшення швидкості між компонентних звязків
Чіпи
Діапазон 18……28 мм (прямокутний)
1) Використання радіохвиль
Фіра Соні використала такий підхід найперше
Бездротовий підхід

Трансивер(ресивер) – прийомо передавач, це передавач і приймач в одному.
Зв'язок на міліметрових хвилях:
F=30………300 ггц
Антена – 1 мм
Пристрій(трансивер) споживає 70 мВт.
Дозволяє передвати дані із швидкістю 11 Гбіт/мек на відстань до 14 мм.
Застосовуючи направлену антену можна забезпечити зв'язок до 50 мм.
2)Оптичний зв'язок
А)Роботи фірми інтел
Фотонні інтегральні схеми
Є трансивер(приймач-передавач) та є оптичний модулятор
Тобто перетворювач
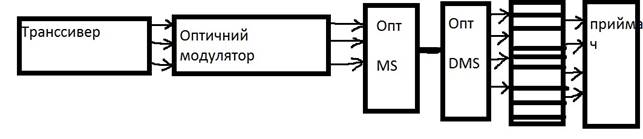
Оптичний мультиплексор MS
Оптичний демультиплексор DMS
Мультиплексор і демультиплексор.Перетворення параельного коду в посудовроаі код.
Все робиться з кремнію.
Тепер рекламує 100 гбіт/сек
В перспективі оптичні канали з терабітною здатністю передавання на вузлі до 100 м.
Б) IBM
Потрібно передавати дані із швидкістю 100 гігабіт в секунду.
Канал транссивера, який об'єднює електричні і оптичні частини займає всього 0,5 мм квадратного
Технологія: Integrate Silicon Nanophotonics –інтегрована кремнієва нанофотоніка.
Дослідницький одночіповий транссивер дозволяє обробляти і передавати дані на швидкості більше 1 тбіт/сек
ІБМ хоче буде створювати ексафлонсний комп, який має 10 в 18 степені флопс
В) Роботи МТІ (масачусецьких технологічний інститут)
МТІ розробляє лазерний модулятор на гермонії.
В табличці Мінділєєва є 8 груп , так от германій і кремній є 4 група , а сполука арсенід галія.
Швидкодія арсенід-галію краще ніж швидкодія германію і кремнію.
Г) Рекорд Гінесса
АТ енд Е – американська та японська фірма НЕС зробили таке чудо
Зробили передачу даних на рівні 32 тбіт/сек на віддалі всього 580 км.
Вони взяли спочатку лазери зі швидкістю 100тбіт/сек на кремнії , а далі вони взяли 320 каналів і скинули все в одну купу.
ПАРАЛЕЛЬНА ОБРОБКА ІНФОРМАЦІЇ
Потрібна висока продуктивність.
У світі є більше 20 натофлоксних каналів.
1) Суміщення в часі різних станів різних задач.
Це є мультипрограмна оброка інформації.Вона можлива навіть в однопроцесорній ЕОМ і широко використовується в сучасних системах обробки даних.
2)Одночасне розвязання різних задач або частин однієї задачі.
Цей шлях можливий тільки за наявності декількох пристроїів обробки.Використовуються ті, або інші особливості задач, або потоків задач, що дає можливість створити той або інший паралелізм.
Виділяють декілька типів паралелізму—
2.1природний паралелізм незалежних задач
2.2паралелізм незалежних гілок
2.3паралелізм обєктів або даних
3) Конвеєрна обробка інформації
Розглянемо
2.1) природний паралелізм незалежних задач
Полягає в тому, що в систему поступає попередній потік незвязаних між собою задач , тобото розвязання будь-якої задачі не залежить від результатів розвязання задач інших задач.
У цьому випадку використовується декілька пристроїв обробки підвищує продуктивність системи.
2.2) Паралелізм незалежних гілок
Полягає у тому, що при розвязанні великої задачі може бути виділені окремі незалежні частини гілки програми, які при наявності декількох пристроїїв обробки можуьб виконуватися паралельно та незалежно один від одного.
Двома незалежними гілками програми будемо вважати такі частини задачі при виконанні яких виконуються наступні умови
1. Ні одна із вхідних для гілки програми величин не є вихідною величиною іншої програми
2.Для обох гілок програми не можуть робитися запис у одні і такі самі комірки памяті
3.Умови виконання одної гілки не залежать від результатів, або ознак, отриманих при виконанні іншої гілки
4.Обидві гілки мусять виконуватися за різними блоками програми.
Добре уявлення про паралелізм незалежних гілок дає ЯПФ – ярусна паралельна форма програми, приклад якої наведемо на рис.
Програма представлена у вигляді сукупності гілок, розміщених на декількох рівнях – ярусах.
Кругами з цифрами в середині позначені гілки.
Стрілками позначені вхідні дані та результати обробки.
Вхідні дані позначені символом Х. а вихіні дані символом У.
Символи Х мають нижні цифрові індекси, які позначають номера вхідних величин.
Символі У мають цифрові позначення знизу і вгорі, цифри вгорі відповідають номеру гілки , при виконанні якої отриманий даний результат, а цифра а знизу біля У визначає порядковий номер результату , який отриманий при реалізації даної гілки програми.
Зображена на малюнку програма має 14 гілок які розміщені на 5 ярусах .
Гілки кожного ярусу не пов’язані одна аз одною, тобто результати розміщення будь-якої гілки даного ярусу не є вхідними даними для іншої гілки цього ж ярусу.
Граф схема і фрази:
На цьому ж графі можуть бути зображенні і зв’язки за керуванням або пам’яттю. У цьому випадку граф-схема дозволяє наочно показати повністю незалежні гілки. Для простоти зображення ми цього не робимо.
На прикладі цієї досить простої програми можна виявити переваги КС, яка залучає декілька пристроїв обробки та проблеми , які при цьому виникають.
Приклад:
Довжина і-тої гілки представлена числами часових одиниць ti , які необхідні для її виконання .
Для одного обчислювального засобу(компа) 
Якщо уявити що програм авиконується двома пристроями обробки , що працюють незалежнаа один від одного то час рішення задачі скоротиться. Але заральний час рішення задачі буде різний у залежності від послідовності виконання незалежних гілок.
Розглянемо 3 варіанти даної ЯПФ:
Варіант 1 :
Процесор 1 виконує гілки 1,4,5,9,10,13
Процесор 2 виконує гілки 2,6,3,7,8,12,13,14
При цьому проц.1 витрачає 145 одиниць часу, з яких 55 простоює.
Процесор 2 витрачає 230 одниць часу .
Варіант2:
Процесор 1 виконує гілки 1,4,5,9,10,11,13
Процесор 2 виконує гілки 2,6,3,7,8,12,14
При цьому проц.1 витрачає 160 одиниць часу, з яких 25 простоює.
Процесор 2 витрачає 215 одниць часу .
Варіант3:
Процесор 1 виконує гілки 1,4,8,12,11,13
Процесор 2 виконує гілки 2,6,3,7,9,10,14
При цьому проц.1 витрачає 1175 одиниць часу,
Процесор 2 витрачає 200 одниць часу з яких 5 простоює.
Розглянуті 3 варіанти: замість 375 одиниць часу , в 1 вар.-230, в 2вар.-215 , в 3вар.-200 одиниць часу отримали замість 375 отримали 200.
Для того щоб із допомогою декількох пристроїв обробки розв’язати задачу яка має незалежні паралельні гілки необхідно організувати програму яка визначає шляхи розв’язання задачі та виробляє інформацію про готовність кожної гілки.
Все це відносно легко реалізувати коли достатньо точно відомо тривалість виконання кожної гілки. На практиці це буває досить рідко (дуже рідко). В кращому випадку відома наближена довжина гілки. Тому організація оптимального графіка роботи є досить складною задачею.
Як правило важко уникнути деяких простоїв, які виникають за відсутності початкових даних для виконання гілки. Все це призводить до того що виграш в продуктивності системи трохи знижується.
Тобто проблема є. Але при розв’язанні багатьох складних задач тільки програмування із виділенням незалежних гілок дає можливість істотно скоротити час розв’язання.
Добре піддаються паралельній обробці задачі шотирна алгебра , лінійне програмування , спектральна обробка сигналів , прямі та зворотні перетворення Фур’є.
2.3 ПАРАЛЕЛІЗМИ ОБ’ЄКТІВ АБО ДАНИХ.
Має місце тоді коли за одною і того самою програмою мусить оброблятися деяка сукупність даних, які надходять в систему одночасно.
ПРИКЛАДИ:
1 задача обробки сигналів РЛС(радіо-локаційних станцій) : всі сигнали обробляються за одною і тою самою програмою.
2. обробка інфи від давачів які вимірюють одночасно один і той самий параметр і які встановлені на декількох однотипних об’єктах.
Ці програми можуть бути різної складності які мають декілька операцій до сотні і тисячі операцій.
3. це можуть бути і суто математичні задачі (наприклад задачі векторної алгебри).розв’язання задач при цьому зводиться до виконання однакових операцій над парами чисел двох аналогічних об’єктів.
Нариклад : 1) завдання двох матриць розрядності (nxm)

При цьому операція додавання над (nxm) парами чисел .
2). Добуток матриці розрядністю (nxm) зводиться до виконання (nxm) множень елементів матричні на скаляр  .
.
Всі ці операції як + така і * можуть виконуватися паралельно та незалежно одна від одної декількох пристроями обробки.
3). Конвеєрна обробка інформації.
Може бути реалізована у системі і з одним процесором який поділений деяке число послідовно включених операційних блоків, кожен з яких спеціалізований на виконання чітку результатіо визначеної частини операцій у результаті створюється свого роду конвеєр обробки.
ПРИКЛАД КОНВЕЄРА:
Операція додавання двох чисел з рухомою комою.

Може поділити операцію на 4 етапи, які виконуються послідовно:
1. Порівняння порядків
2. Вирівнювання порядків (зсув мантиси з меншим порядком для вирівнювання з мантисою з більшим порядком).
3. Додавання мантис.
4. Нормалізація результату.
У відповідності зі схемою у складі процесора 4 операційні блоки поєднані послідовно, які реалізують 4 кроки операції додавання. Тобто блоки ПП,ВП,ДМ,НР.
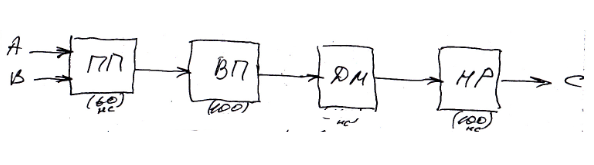
Час виконання кожного кроку приблизно =. Загальна сума операції додавання 400нс.
Припустимо що виникає задача додавання двох векторів  які містять по n елементів з рухомою комою. Для розвязання цієї задачі вимагається додати два числа
які містять по n елементів з рухомою комою. Для розвязання цієї задачі вимагається додати два числа

Для того щоб не створювати черги операцій на обробку припустимо що час виконання кожного з цих етапів одинаковий і рівний максимальному значенню 
Робити всі команди конвеєра цикловими по часу
Однак в результаті 1 результат ми отримали на конвеєрі за 560 нс.
Але наступні результати будуть отримуватися за 140 нс.
ЧАСОВА ДІАГРАМА РОБОТИ КОНВЕЄРА
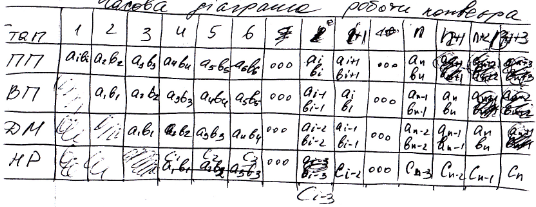
Загальний час додавання двох векторів за допомогою буде такий:
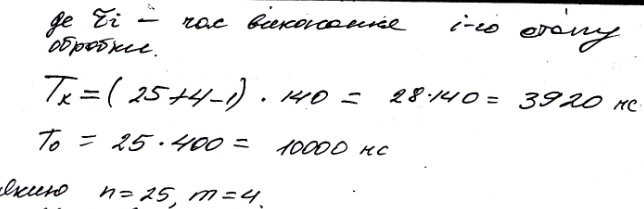
Це є виграш в часі конвеєра в даному конкретному випадку.
Чим довше ланцюжок даних тим більше число етапів тобто операційних блоків поділяються операція при тій самій тривалості її виконання тим більший ефект від використання конвеєра.
КОНВЕЄР КОМАНД
Ідея конвеєра може бути розповсюджена і на виконання команд.
Цикл виконання команди розбиваються на декілька етапів:
1. Формування адреси команд.
2. Вибірка команди з пам’ятю.
3. Розшифровка коду операції.
4. Формування адреси операнду.
5. Вибірка операнду з пам’яті.
6. Арифментична або логічна операція .
В пристрої керування передбачається блоки які не залежно один від одного і паралельно можуть виконувати вказані вище етапи.
| Етап | ||||||||
| ФАК | К1 | К2 | К3 | К4 | К5 | К6 | К7 | К8 |
| ВК | - | К1 | К2 | К3 | К4 | К5 | К6 | К7 |
| РКО | - | - | К1 | К2 | К3 | К4 | К5 | К6 |
| ФАО | - | - | - | К1 | К2 | К3 | К4 | К5 |
| ВО | - | - | - | - | К1 | К2 | К3 | К4 |
| АЛО | - | - | - | - | - | К1 | К2 | К3 |
Час виконання кожного етапу прийнято однаковим, але це не обов’язково і не завжди виконується. В конвеєрі команд виконується суміщення у часі виконання <- операцій (<-число етапів ) на яке поділено виконання команди, що дозволяє істотно збільшити продуктивність такої конвеєрної системи.
Недоліки:
Виграш за продуктивністю в <- разів практично не можливий, бо може бути отриманий тільки при виконанні програми без умовних переходів. Наявність умовних переходів відразу порушує роботу конвеєра та призводить до «холостих» перебігів конвеєра, коли за випрацюваною в команді Кі ознакою результату треба перейти до виконання не Кі+1, а зовсім іншої, що викликає необхідність очищення усіх блоків та завантаження їх іншою операцією.
Виключити зовсім умовний перехід не вдається!!
Для певних задач, де мають місце ланцюги команд без умовних переходів виграш у продуктивності конвеєра команд виявляється значним.
Виграш у продуктивності отримуємо тим більше, чим довше часті програми без умовних переходів і чим більше передбачаються незалежних етапів, тобто блоків пристроїв керування при виконанні команди.
В сучасних КС можна одночасно використовувати і конвеєр команд і конвеєр операцій і, навіть, декілька паралельно працюючих конвеєрів команд і арифметичних операцій . За цим методом будуються найпродуктивніші сучасні КС.
В Україні є школа по конвеєрах в КПІ на обч. Тех… Самофалов і Луцький багато років займаються комп’ютерною системою.
Щось по конвеєрах:
Різновиди конвеєрів команд
а) елементарний ( класичний) конвеєр;
б) супер-скалярний конвеєр;
в)супер-конвеєр;
г) супер-скалярний супер-конвеєр;
д)VLIW-конвеєр
Конфліктні ситуації в в конвеєрах команд
а)структурний ризик(конфлікт за ресурсами);
б)ризик за даними (конфлікт за даними);
в)конфлікти керування або управління ( проблема передбачення умовних переходів).
Методи розв’язання проблеми умовного переходу:
а)буфери (перед вибірки);
б)множинні потоки;
в)затриманий перехід;
г) передбачення переходів;
Методи передбачення умовних переходів:
1. Статичні.
2.Динамічні.
Статичні.
А) перехід відбувається завжди ;
б) перехід не відбувається ніколи;
в)передбачення відбувається за результатами профілювання програми, що підлягають виконанню;
д)передбачення залежить від напряму переходів;
е)при першому виконанні команди перехід має місце завжди.
Динамічні
А) однорівневі схеми;
б)дворівневі схеми;
в) гібридні схеми;
г) асиметричні схеми.
Локальна тема
Класифікація КС ХокНі. 1986р..
Множинний потік команд може оброблятися 2-ма способами
1-Конвеєрний.
2-Потік обробляється власним пристроєм
2.11(машини з розподіленою пам’ттю)
2.12(перемикачі бувають : простий, багато командний, загальна шина)- загальна пам’ять
2.2всі мають розподілену пам’ять, але мають різну топологію мережі
2.2 Різні топології мережі
2.2.1- Зіркоподібна мережа
2.2.2-Регулярні решітки різної розмірності
2.2.3-Гіперкути
2.2.4- Мережі з ієрархічною структурою:
а) дерева;
б)піраміди;
в)кластери
2.2.5- мережі що змінюють свою конфігурацію (конфігуровані чи реконфігуровані)
Закон Амдала 1967р.
І-ший його закон
Продуктивність КС , що створена зі зв’язаних між собою пристроїв в загальному випадку визначається найбільш не продуктивним його пристроєм.
ІІ закон
Хай система створена з S- однакових, простих універсальних пристроїв. Припустимо що при виконанні паралельної частини алгоритму, - всі S-пристрої завантаженні повністю, тоді можливе прискорення
R= S/(ΒS+(1-β)) -максимально можливе прискорення
де β=n/N, β-Є частка послідовних обчислень.
Припустимо що чомусь n-операції з N мусимо виконувати послідовно.
ІІІ закон
Хай система створена з простих однакових універсальних пристроїв при будь-якому режимі роботи її прискорення не може перебільшити зворотної величини частки послідовних обчислень( вирішує логарифмічність)
Якщо послідовно виконувати n-операцій, то число ярусів будь-якої паралельної форми алгоритму не може бути менше n.
Системи мусять бути завантаженні достатньо повно . Бажано щоб частка послідовних операцій в алгоритмах була в тодку 0,10÷0,01%
Децентралізовані системи
1. Теорія колективної поведінки
2. Теорія ройового інтелекту
3.Мультигенні системи
Важливе:
Необхідність відповідності природи об’єкта досліджень та інструмента досліджень.
Використовується концепція самоорганізації за простором, часом та за параметрами , що досліджуються .
Теорія колективної поведінки базується на двох гіпотезах:
- гіпотеза про простоту;
- гіпотеза про перевагу колективної поведінки над індивідуальними діями.
Гіпотеза про простоту
Будь-яка достатньо складна поведінка складаєтсяь із сукупностей простих поведінкових актів; їх сумісна реалізація і найпростіша взаємодія призводить у результаті до досить складних поведінкових процесів.
Дії колективу сутностей не є лише сумою індивідуальних дій, а утворюють нову якість
Агент, мультиагентна система – створена штучно, автономна реальна чи віртуальна сутність( сукупність апаратних і програмних засобів), яка спроможна виконувати самостійні цілеспрямовані активні діїу складі колективу або ідивідуально в інтересах володаря чи користувача.
Під агентом можна і розуміти сутність або об’єкт, котрому притаманна властивість діяти проявити активність у системі координат – простір час параметр.
agent(agentis-діючий)
Колектив існує поки є хоч 1 агент
Самоорганізація- процес впорядкування ( спосіб збільшення порядку)( негентропія)
за простором, часом і параметрами, шляхом встановлення взаємозв’язку та взаємодії первино-невпорядкованої підмножини сутності (агентів) з метою створення системи:
1.Функцінувальні можливості якої вище за суму можливостей окремих сутностей агентів, що входять до її складу.
2. ЩО здатна адаптуватися до впливів зовнішнього середовища шляхом зміни своєї структури і функцій .
3. Яка здатна підтримувати свій гомеостазис та життєдіяльність при певних змінах зовнішнього середовища.
4.Які здатні виявліяти не однорідності речовини та енергії в просторі і часі.
Завдяки чому досягається новий якісно вищий рівень виконання системою, що сам організовується установлених перед нею власником або сформованих нею самою завдань в сфері практичних завдань
Саморганізація як процес і як результат не може розглядатися як властивість будь-якої центральної системи. Вона досягається при відсутності будь-яких організмів централізованого керування. Можна висунути гіпотезу що централізовані системи породжуються лише централізовану організацію як процес і як результат .
Основний набір службових алгоритмів колективної поведінки автономних агентів
1.Алгоритми координації
1.1 Самовиявлення колективу автономних агентів . Колектив отримує інформацію про свою побудову в просторі
1.2 Самоіменнування колективу автономних агентів
1.3 Самоузгодження колективу
2Алгоритми самоорганізації
2.1 Самовпорядкування колективу в просторі
2.2 Самосинхронізація колективу у часі без застосування зовнішнього годинника
2.3 Саморганізація за параметром.