Система трех взаимно перпендикулярных плоскостей
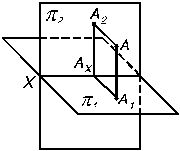
На практике исследования и построения изображений система двух взаимно перпендикулярных плоскостей не всегда дает возможность однозначного решения. Так, например, если переместить точку А вдоль оси Х, то ее изображение не изменится.
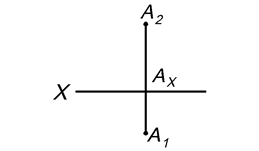
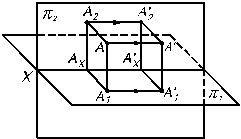
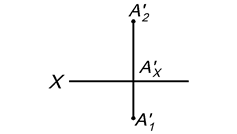
Положение точки в пространстве (рис. 2.22) изменилось (рис. 2.24), а изображения на комплексном чертеже остались без изменений (рис. 2.23 и рис. 2.25).
| 
|
| Рис. 2.22 | Рис. 2.23 |
| 
|
| Рис. 2.24 | Рис. 2.25 |
Для решения данной задачи вводят систему трех взаимно перпендикулярных плоскостей, так как при составлении чертежей, например машин и их частей, требуется не два, а больше изображений. На этом основании в некоторые построения при решении задач необходимо вводить в систему p1, p2 и другие плоскости проекций.
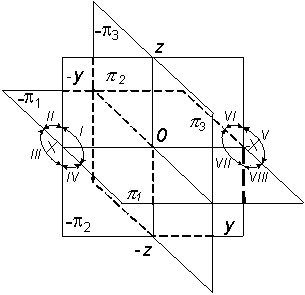 Рис. 2.26
Рис. 2.26
| Рассмотрим три взаимно перпендикулярные плоскостиp1,p2,p3(рис. 2.26). Вертикальная плоскостьp3называется профильной плоскостью проекции. Пересекаясь между собой, плоскостиp1,p2,p3 образуют оси проекций, при этом пространство делится на 8 октантов.
p1  p2 = x; -x
p1p3 = у; -у
p2 p3 = z; -z
0 – точка пересечения осей проекций. p2 = x; -x
p1p3 = у; -у
p2 p3 = z; -z
0 – точка пересечения осей проекций.
|
Эти плоскости делят все пространство на VIII частей, которые называются октантами (от лат. okto восемь). Плоскости не имеют толщины, непрозрачны и бесконечны. Наблюдатель находится в первой четверти (для систем p1, p2) или первого октанта (для систем p1, p2, p3) в бесконечном удалении от плоскостей проекций.
§ 6. Точка в системе p1, p2, p3
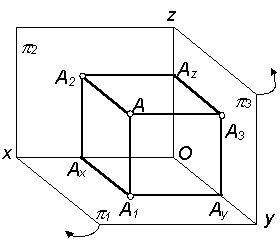
Построение проекций некоторой точки А, расположенной в I октанте, на три взаимно перпендикулярные плоскости p1, p2, p3 показано на рис. 2.27. Используя совмещение плоскостей проекций с плоскостью p 2 и применяя способ вращения плоскостей, получаем комплексный чертеж точки А (рис. 2.28):
АА1 ^ p1; АА 2 ^ p2; АА 3 ^ p3,
где А3 – профильная проекция точки А; АХ, Аy, АZ – осевые проекции точки А.
Проекции А1, А2, А3 называются соответственно фронтальной, горизонтальной и профильной проекцией точки А.
| 
|
| Рис. 2.27 | Рис. 2.28 |
Плоскости проекций, попарно пересекаясь, определяют три оси x, y, z, которые можно рассматривать как систему декартовых координат: ось Х называется осью абцисс, ось y – осью ординат, ось Z – осью аппликат, точка пересечения осей, обозначаемая буквой О, есть начало координат.
Так, зритель, рассматривающий предмет, находится в первом октанте.
Для получения комплексного чертежа применим способ вращения плоскостей p1 и p3 (как показано на рис. 2.27) до совмещения с плоскостью p2. Окончательный вид всех плоскостей в первом октанте приведен на рис. 2.29.
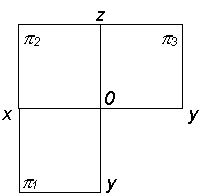
Рис. 2.29
Здесь оси Оx и Оz, лежащие в неподвижной плоскости p2, изображены только один раз, ось Оy показана дважды. Объясняется это тем, что, вращаясь с плоскостью p1, ось y на эпюре совмещается с осью Оz, а вращаясь с плоскостью p3, эта же ось совмещается с осью Оx.
Рассмотрим рис. 2.30, где точка пространства А, задана координатами (5,4,6). Эти координаты положительны, и сама она находится в первом октанте. Построение изображения самой точки и ее проекций на пространственной модели осуществляется с помощью координатного прямоугольного параллелограмма. Для этого на осях координат откладываем отрезки, соответственно отрезкам длины: ОАх = 5, OАy = 4, OАz = 6. На этих отрезках (ОАx, ОАy, ОАz), как на ребрах, строим прямоугольный параллелепипед. Одна из его вершин будет определять заданную точку А.
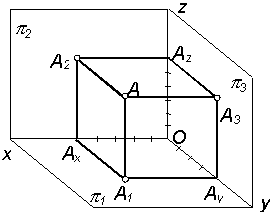
Рис. 2.30
Говоря о системе трех плоскостей проекций на комплексном чертеже (рис. 2.30), необходимо отметить следующее.