Модель колебательного процесса - раздел Философия, МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ МОДЕЛИРОВАНИЯ СЛОЖНЫХ СИСТЕМ Колебаниями Или Колебательным Движением Называется Движение (Изменение...
Колебаниями или колебательным движением называется движение (изменение состояния), обладающее повторяемостью во времени - процесс изменения параметров системы с многократным чередованием их возрастания и убывания.
Колебания по своей физической природе весьма разнообразны (механические, электромагнитные колебания и др.).
Осциллятор - система, в которой какие-либо параметры совершают колебания при отсутствии переменных внешних воздействий.
При колебаниях происходит знакопеременное отклонение параметров от их определенных значений. Эти значения могут соответствовать установившемуся состоянию системы или изменяться во времени по некоторому закону. Как привило, колебания сопровождает преобразование одной формы энергии в другую.
Любые колебания представляют собой движение с переменным ускорением, отклонение (мгновенное перемещение относительно положения равновесия), скорость и ускорение являются функциями времени. Для любых колебаний характерна периодичность.
Маятник может не только колебаться со своей собственной частотой, его можно заставить колебаться под влиянием внешнего воздействия. Если это влияние периодическое, оно может навязать осциллятору свою частоту. Наличие маятника собственной частоты проявляется в явлении резонанса. Малое воздействие частоты, близкой к частоте маятника (резонансной частоты) может привести к сильным колебаниям, тогда как на далекое от собственной частоты воздействие маятник может реагировать слабо.
Общее представление об осцилляторе как колебательной системе, описываемой простым дифференциальным уравнением, стало основой общей для многочисленных конкретных случаев математической модели. Наука о колебаниях легла в основу радиотехники, радиофизики, прикладной и теоретической механики. В поведении осциллятора находят многие разнообразные явления. Одна из универсальных моделей – осциллятор механический, электрический. Механический маятник - в основе часов. Колебательный контур электрического маятника, состоящий из самоиндукции и емкости – в основе радиопередатчика и радиоприемника.
Колебания называются периодическими, если значения физических величин, изменяющихся в процессе колебаний, повторяются через равные промежутки времени.
Период колебаний Т – наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебательное движение.
Отклонение х = f (t) – мгновенное перемещение относительно положения равновесия.
Амплитуда – А – максимальное абсолютное значение отклонения - максимальное отклонение Хmax, размах колебаний.
Частота колебаний n – число полных колебаний в единицу времени n = 1/Т (измеряется в герцах). Угловая частота w = 2p n = 2p / Т.
Фаза j = w t + j0. Характеризует мгновенное состояние колебательной системы и определяется двумя параметрами (отклонением и временем).
Зависимость от времени t, периодически колеблющейся физической величины S имеет вид:
S = S0 + х(t), где S0 – значение величины S в положении равновесия, х(t) – периодическая функция времени: х(t + T) = х(t).
Простейший тип периодических колебаний являются гармонические (синусоидальные) колебания:
х = A sinj = A sin(w t + j0) или x = A cos(w t + j1), где A,w, j0, j1 - постоянные величины, причем А > 0, w > 0, j1 = j0 + p/2. А – максимальное абсолютное значение х – амплитуда колебания.
Первая и вторая производная по времени от гармонически колеблющейся величины y также изменяется по гармоническому закону:
х’ = Aw cos(w t + j0) = A w sin(w t + j0 + p /2),
х’’ = - Aw2 sin (w t + j0) = Aw2 sin(w t + j0 + p) = - w2х.
Следовательно, гармонически колеблющаяся величина х удовлетворяет уравнению (дифференциальное уравнение гармонических колебаний): х’’ + w2х = 0.
Это же соотношение получается и из геометрического построения, поскольку гармонические колебания можно рассматривать как проекцию равномерного движения по окружности.
Гармонические колебания представляют собой движение с переменным ускорением – ускорение является функцией времени.
Гармоническое колебание может быть представлено графически с помощью вращающегося вектора амплитуды.
Вектор А, численно равный амплитуде колебаний, равномерно вращается против часовой стрелки вокруг оси О, перпендикулярной плоскости чертежа, с угловой скоростью w. Если в момент времени t = 0 угол между вектором А и осью Ох равен j1, то проекция В конца этого вектора на ось Ох совершает гармонические колебания по закону x = A cos(w t + j1).
Свободные колебания – колебания, которые возникают в системе, не подверженной действию внешних сил, в результате какого-либо начального отклонения этой системы от состояния начального равновесия.
При любых колебаниях отклонение системы вызывает появление восстанавливающей силы, которая стремится возвратить систему в положение равновесия. Линейный закон силы: восстанавливающая сила пропорциональна ускорению. Согласно основному закону динамики F = ma
При отклонении точки от положения равновесия потенциальная энергия возрастает, если после отклонения точка начнет движение, то при отсутствии сопротивления в силу закона сохранения энергии (кинетическая и потенциальная энергии системы равны) точка будет совершать незатухающие колебания относительно положения равновесия.
Движение шарика, присоединенного к пружине.
Рассмотрим модель движения шарика, присоединенного к пружине с жестко закрепленным концом.
Пусть r – координата шарика вдоль оси пружины, лежащей на горизонтальной плоскости. и направление движения шарика совпадает с ее осью. Тогда по второму закону динамики
F = ma = md2r/dt2,
где m – масса шарика, а – его ускорение. Будем считать плоскость идеально гладкой (движение происходит без трения), пренебрежем сопротивлением воздуха и примем во внимание то, вес шарика уравновешивается реакцией плоскости.
Единственная сила, действующая на шарик в направлении оси r, очевидно, сила упругости пружины. Определим ее, используя закон Гука, гласящий, что для растяжения (сжатия) пружины необходимо приложить силу
F = - kr,
Где коэффициент k > 0 характеризует упругие свойства пружины, а r – величину ее растяжения или сжатия относительно нейтрального, ненагруженного положения r = 0. Уравнение шарика принимает вид (уравнение элементарного осциллятора)
t > 0. (1)
Оно описывает его гармонические колебания и имеет общее решение
r(t) = r0 /ω sinωt + r0 cos ωt r = A cos (ωt+φ), (2)
где - частота колебаний пружины в отсутствии внешних сил или собственная частота колебаний системы "пружина – шарик", не зависящая от начальных условий и определяющая период Т = 2π/ω колебаний, измеряемый в секундах, - амплитуда колебаний, φ = arctg(ω r0 / v0). В отличие от угловой частоты, измеряемой в рад/с, частотf колебаний f = 2πω измеряется в герцах.
Значения коэффициентов определяются из начального состояния объекта, т.е. через величины r(t = 0) = r0 и v(t = 0) = v0 (v(t) - скорость шарика), причем r(t) ≡ 0 при r0 = v0 = 0.
Примеры иерархии модели.
Уточнение модели.
1. Пусть на шарик действует известная внешняя сила F (r, t), зависящая от времени и положения шарика. Она может порождаться полем тяготения, иметь электрическое или магнитное происхождение и т.д.
По сравнению с базовой моделью колебаний в правой части уравнения появляется дополнительный член – внешняя сила
md2r/dt2 = - kr + F (r, t).
Примем, что внешняя сила F постоянна F (r, t) = F0. Проводя замену r* = r - F0 / k, получаем для r*
d2r*/dt2 = - kr*,
т.е. постоянная сила не вносит изменений в процесс колебаний за тем исключением, что координата нейтральной точки, в которой сила, действующая на шарик равна нулю, сдвигается на величину F0 / k.
2. Рассмотрим случай, когда внешняя сила зависит от времени, для определенности примем эту зависимость периодической F (t) = F0sinω1t:
Решение этого уравнения будем искать как сумму общего решения однородного уравнения (2) и частного решения неоднородного уравнения (3) в виде r1(t) = C sinω1t. Подстановкой этого выражения в (3) находим
С = F0 / (k - m ω12) = F0 / m (ω12 - ω12),
В итоге для общего решения системы (3) имеем
Внешняя сила F (t) приводит не только к появлению в системе дополнительных колебаний с частотой ω1, но и к возникновению резонанса – неограниченному росту амплитуды колебаний при ω1 → ω.
Учет силы трения.
Силы трения могут появиться по двум причинам: неидеальность поверхностей движения и сопротивление среды (воздуха, воды и т.п.).
В первом случае внешняя сила (сила трения) постоянна - пропорциональна весу и площади соприкосновения, не зависит от скорости и направлена против движения шарика (ее знак противоположен знаку скорости шарика).
Сила трения равна F = k1P, где – k1 коэффициент трения (на единицу поверхности), P = mg – вес шарика. Движение шарика подчиняется уравнению
md2r/dt2 = - kr – k1mg sign dr/dt.
Оно внешне похоже на уравнение с постоянной силой F0, но из-за знакопеременности не сводится к стандартному уравнению колебаний – эти уравнения описывают существенно разные процессы. В частности, амплитуда колебаний шарика существенно уменьшается со временем.
Во втором случае внешняя сила (сила трения) не постоянна - существенно зависит от скорости движения F = - μv, где коэффициент μ > 0 определяется размерами шарика, плотностью среды, ее вязкостью.
При малой вязкости в системе происходят затухающие со временем колебания, при большой вязкости колебания отсутствуют благодаря подавляющему действию сил вязкого трения.
Системность... Системные идеи лежат в основе деятельности человечества с начала его... Необходимость решения специфических проблем связанных с возникновением и развитием больших и сложных систем вызвала...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Модель колебательного процесса
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
Определение понятия системы
Определение понятия "модель системы" предполагает, прежде всего, определение понятия "система".
Определение понятия системы – это тоже модель (лингвистическая
Внешняя среда
Внешняя среда -набор существующих в пространстве и во времени факторов, которые оказывают действие на систему и которые испытывают влияние со стороны системы.
Объекты,
Функции системы
Функции системы –действия компонентов системы (преобразования входов в выходы), необходимые для выполнения системой своих задач, обусловленных целью системы (интегративным свой
Системный подход
В основе системного подхода лежит стремление изучить объект (систему, явление, процесс) как нечто целостное и организованное, во всей полноте и многообразии связей – ориентирует на рассмотре
Развитие искусственной системы и ее жизненный цикл
В системе как элементе системы более высокого уровня могут накапливаться противоречия (проблемы), для разрешения которых система должна иметь новые функциональные свойства –
Целевой характер моделирования
Система может иметь практически необозримое количество сущностей (свойств), создание модели всей системы нереально – не существует модели «вообще».
Таким образом, моделирование имеет це
Процесс моделирования
Как разделить модель на подмодели, как построить иерархию моделей для исследования элементов (декомпозиция) и как их потом объединить для исследования системы в целом, чтобы объяснить целое через ч
Цели математического моделирования
Создание модели всей системы нереально – не существует модели «вообще».
Из этого следует множественность моделей одного объекта: для каждой цели требуется своя модель одно
Анализ чувствительности модели
При построении модели параметров и предположения могут быть приняты с некоторой степенью неопределенности, кроме того, параметры могут изменяться в зависимости от внешних условий и во времени. Чувс
Описание внешних воздействий
Внешние воздействия - совокупность факторов, воздействующих на систему и оказывающих влияние на эффективность ее функционирования.
Модель внешних воздействий должна обладать следующими осн
Декомпозиция системы
Система представляется набором моделей, отображающих ее поведение на различных уровнях декомпозиции (стратах). Каждый уровень учитывает присущие ему свойства, переменные и зависимости.
Дек
Подготовка исходных данных для математической модели
Исходные данные для разработки математической модели содержат выявленные законы функционирования системы в виде операторов, параметры и переменные модели, условные обозначения, классификацию исходн
Модель состава и структуры системы
Модель состава
Модель состава – список элементов системы. Сложность построения модели состава состоит в ее неоднозначности. Это же относится и к границам
Виды структур
В основе исследования структуры лежит ее классификация. Принципы построения и вид модели структуры системы зависят от типа системы и целей исследований.
При моделировании систем вообще и,
Установление функциональных зависимостей
После перехода от описания моделируемой системы к ее модели, построенной по блочному принципу, необходимо построить математические модели процессов, происходящих в различных блоках.
Исходн
Функционально стоимостной анализ.
Под функционально стоимостным анализом понимают метод системного анализа функций объекта (технологического процесса, производства, системы управления), направленный на поиск технико-экономических р
Пути уменьшения неопределенностей
Неопределенность уменьшается при разработке и анализе альтернативных вариантов, дополнительном анализе неопределенных факторов (сбор и обработка недостающих исходных данных, выявление среди множест
Формализация системы в виде автомата
Технические устройства дискретного действия для переработки информации лежат в основе вычислительных машин, автоматических устройств для управления объектами в системах регулирования и управления и
Формализация системы в виде агрегата
При выборе той или иной схемы формализации системы всегда возникает противоречивая задача – получить как можно более простую модель и обеспечить требуемую точность. При таком подходе различные сист
Моделирование процесса функционирования агрегата
Процесс функционирования агрегата состоит из скачков состояния в моменты поступления входных сигналов и выдачи выходных сигналов и изменений состояния между этими моментами.
Цель моделиров
Моделирование агрегативных систем
Агрегативные системы (А-системы) - класс сложных систем, обладающий следующим свойством: существует такое (в общем случае неоднозначное) расчленение системы на элементы, при котором к
Модель сопряжения элементов
Математическая модель сложной системы помимо формального описания элементов обязательно включает формальные описания взаимодействия элементов – модель сопряжения.
В модели сопряжения эл
Законы Ньютона.
Рассмотрим систему, модель которой может быть представлена как материальная точка, система материальных точек (механическая система).
Материальная точка - тело, размеры и форма которого не
Закон сохранения импульса.
Количество движения (импульс) материальной точки Кi = mivi .Это векторная величина, его направление совпадает с направлением скорости. Количество движения (импульс) системы:
К =
Работа, энергия, мощность
Силы служат причиной либо ускорения тела (динамическое действие), либо изменения его формы (статическое действие).
Если сила перемещает тело на некоторое расстояние, то она совершает над т
Работа против силы тяжести.
Если тело движется в направлении действия силы тяжести, то над телом совершается работа A = G h или Aт = mg h.
Чтобы поднять тело (увеличить расстояние от ц
Работа, затрачиваемая на ускорение.
Если под действием постоянной силы Fуск тело равномерно ускоренно перемещается на расстояние s, то над ним совершается работа Aуск = Fуск s
Работа против сил трения.
Движущееся тело теряет энергию из-за наличия трения, которое действует на поверхности соприкосновения тел и и затрудняет их перемещение относительно друг друга.
Динамика поступательного движения.
Основной закон поступательного движения: производная по времени от количества движения К материальной точки или системы точек относительно неподвижной (инерциальной) системы
Тело, брошено под углом к горизонту.
Как и в случае горизонтально брошенного тела, тело движется, в результате комбинации двух движений: равномерного прямолинейного движения под углом к горизонту и свободного падения в вертикальном на
Движение тела переменной массы.
Дифференциальное уравнение поступательного движения твердого тела, масса которого зависит от времени, имеет вид
Модель консервативной системы.
Рассеяние (диссипация) энергии происходит в связи с наличием того или иного вида трения (механическая энергия с течением времени уменьшается за счет преобразования в другие виды энергии, например,
Электрическая подсистема.
Электрическая модель является наиболее и универсальной для описания явлений и процессов различной природы.
Типовыми простейшими элементами электрической подсистемы являются резистор с элек
Модели элементов гидравлических систем
Технические системы, в которых происходит перемещение несжимаемой жидкости, принято называть гидравлическими. Зарубин стр. 110
Участок трубопровода.
По
Модели элементов пневматических систем
Под пневматическими понимают технические системы, в которых рабочей средой является воздух или газ. Рабочая среда, в отличие от газа является сжимаемой: ее плотность r существенно зависит от
Выбор средств доставки грузов.
Имеется m грузообразующих пунктов с объемами грузов аi . Имеется n средств доставки грузов (вид
Экономическая интерпретация задач линейного программирования.
Предприятие располагает определенными, ограниченными производственными мощностями - активными средствами (станки, сырье, рабочая сила, энергия и т.д.). Для изготовления различных видов изделий испо
Перевозки взаимозаменяемых продуктов
Известны объемы и потребности продукции каждого вида. Если продукты, подлежащие перевозке, качественно совершенно различны (уголь, цемент, сахар), так что ни один из них не может быть использован в
Перевозка неоднородного продукта на разнородном транспорте.
Для обеспечения перевозок может быть использовано s автохозяйств, в каждом из которых r типов автомашин. Машины разных типов, обладая различными эксплуатационными характеристиками и р
Основные определения
Строгий подход к термину «управление» требует четкого ответа на вопрос, как и за счет чего может быть выполнена цель управления.
Основная особенность управления - целенаправленность
Формальная запись системы с управлением
Основная особенность управляемых систем – в системе существуют свободные функции, которыми может распорядиться субъект (устройство, исследователь, лицо, принимающее решение) в своих интересах.
Модели систем автоматического управления
Система автоматического управления стремится сохранить в допустимых пределах отклонения (рассогласования) ошибки между требуемыми и действительными значениями управляемых переменных при помо
Устойчивость движения систем
Система управления постоянно подвергается возмущениям, отклоняющим ее от заданного закона движения. Действие возмущения сопровождается восстанавливающим действием регулятора. В системе возни
Определение программного движения и управление движением
Потребности ракетной техники привели к совершенно новым задачам, поскольку кратковременное движение ракеты рассматривается как единый переходный процесс. Здесь возникла еще одна задача – опт
Модели автоматизированных систем управления
Всякая система управления с точки зрения ее функционирования решает три основные задачи: сбор и передача информации об управляемом объекте, переработка информации, выдача управляющих воздействий на
Формирование структуры системы
Структура формируется на основании сравнительного анализа альтернативных вариантов системы, обеспечивающих решение проблемы с учетом внешней среды и неопределенностей будущего функционирования.
Выбор основных проектных параметров системы
Формирование технического облика системы предполагает выбор рациональных значений основных проектных параметров системы, исходя из ее максимальной эффективности в принятых условиях применения.
Современное состояние САПР
Современное состояние САПР уже позволяет решать замкнутые задачи – реализовать сквозной процесс, включающий несколько этапов: анализ требований к изделию, разработка трехмерной модели изделия (в ря
Направления разработки проектной составляющей САПР
Направления разработки проектной составляющей САПР должны соответствовать ключевым направлениям развития проектируемых технических систем: прежде всего разрабатываются те САПР, внедрение которых в
Предпроектные исследования
Проектирование системы начинается с предпроектных исследований, в результате которых определяются цели системы, объем работ, вырабатываются критерии успешности проекта, оцениваются риски. В результ
Постановка задачи
Стадия постановки задачи включает: проведение системно-аналитического обследования и выработка концепции системы, разработка технического задания на проект.
Системно-аналитическое обсле
Проектирование системы
На стадии проектирования на основе анализа предметной области и требований к системе, сформулированных в ТЗ, разрабатываются основные архитектурные решения.
Архитектура процессов –
Архитектура программного обеспечения
Система состоит из двух видов программного обеспечения – общего и специального.
Общее программное обеспечение:
- программное обеспечение сетевого доступа к приложениям и БД
Организационное обеспечение системы
Сложность проектирования организационного обеспечения лежит в социальной, а не в технической сфере – задача психологов и психоаналитиков. Внедрение новых технологий обеспечивает неограниченный прям
Реализация и внедрение системы
Разработчики производят итеративное построение реальной системы на основе полученных в предыдущей фазе моделей, а также требований нефункционального характера. Конечные пользователи на этой фазе оц
Оценка конкурентоспособности
Оценку конкурентов рассматриваемой системы проводится в два этапа: выявление возможных конкурентов и сравнительный анализ конкурентов.
На первом этапе составляется общий список конкурентов
Метод определения чистой текущей стоимости.
Метод оценки приемлемости инвестиций на основе критерия NPV является базовым в современном инвестиционном анализе и широко применяется на практике.
Чистая текущая стоимость - NPV
Метод расчета рентабельности инвестиций
Рентабельность инвестиций - PI (profitability index) - это показатель, позволяющий определить, в какой мере возрастет стоимость фирмы (богатство инвестора) в расчете на 1 доллар (рубль, грив
Метод расчета внутренней нормы прибыли
Внутренняя норма прибыли (внутренний коэффициент окупаемости инвестиций, поверочный дисконт) - IRR (internal rate of return) - представляет собой уровень доходности средств, направленных на
Расчет периода окупаемости инвестиций
Период окупаемости инвестиций РР (payback period) - это срок, который необходим для возмещения суммы первоначальных инвестиций (рассчитанный без дисконтирования).
Если величины дене
Задачи управления проектами
Успешность деятельности предприятия зависит от непрерывной последовательности управленческих решений по инвестиции в проект и управление проектом. Эти решения базируются на анализе внешней среды кА
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail

 Вектор А, численно равный амплитуде колебаний, равномерно вращается против часовой стрелки вокруг оси О, перпендикулярной плоскости чертежа, с угловой скоростью w. Если в момент времени t = 0 угол между вектором А и осью Ох равен j1, то проекция В конца этого вектора на ось Ох совершает гармонические колебания по закону x = A cos(w t + j1).
Вектор А, численно равный амплитуде колебаний, равномерно вращается против часовой стрелки вокруг оси О, перпендикулярной плоскости чертежа, с угловой скоростью w. Если в момент времени t = 0 угол между вектором А и осью Ох равен j1, то проекция В конца этого вектора на ось Ох совершает гармонические колебания по закону x = A cos(w t + j1).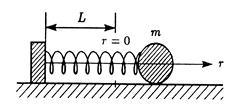 F = ma = md2r/dt2,
F = ma = md2r/dt2, t > 0. (1)
t > 0. (1) - частота колебаний пружины в отсутствии внешних сил или собственная частота колебаний системы "пружина – шарик", не зависящая от начальных условий и определяющая период Т = 2π/ω колебаний, измеряемый в секундах,
- частота колебаний пружины в отсутствии внешних сил или собственная частота колебаний системы "пружина – шарик", не зависящая от начальных условий и определяющая период Т = 2π/ω колебаний, измеряемый в секундах,  - амплитуда колебаний, φ = arctg(ω r0 / v0). В отличие от угловой частоты, измеряемой в рад/с, частотf колебаний f = 2πω измеряется в герцах.
- амплитуда колебаний, φ = arctg(ω r0 / v0). В отличие от угловой частоты, измеряемой в рад/с, частотf колебаний f = 2πω измеряется в герцах.






Новости и инфо для студентов