Модель колебательного процесса
Колебаниями или колебательным движением называется движение (изменение состояния), обладающее повторяемостью во времени - процесс изменения параметров системы с многократным чередованием их возрастания и убывания.
Колебания по своей физической природе весьма разнообразны (механические, электромагнитные колебания и др.).
Осциллятор - система, в которой какие-либо параметры совершают колебания при отсутствии переменных внешних воздействий.
При колебаниях происходит знакопеременное отклонение параметров от их определенных значений. Эти значения могут соответствовать установившемуся состоянию системы или изменяться во времени по некоторому закону. Как привило, колебания сопровождает преобразование одной формы энергии в другую.
Любые колебания представляют собой движение с переменным ускорением, отклонение (мгновенное перемещение относительно положения равновесия), скорость и ускорение являются функциями времени. Для любых колебаний характерна периодичность.
Маятник может не только колебаться со своей собственной частотой, его можно заставить колебаться под влиянием внешнего воздействия. Если это влияние периодическое, оно может навязать осциллятору свою частоту. Наличие маятника собственной частоты проявляется в явлении резонанса. Малое воздействие частоты, близкой к частоте маятника (резонансной частоты) может привести к сильным колебаниям, тогда как на далекое от собственной частоты воздействие маятник может реагировать слабо.
Общее представление об осцилляторе как колебательной системе, описываемой простым дифференциальным уравнением, стало основой общей для многочисленных конкретных случаев математической модели. Наука о колебаниях легла в основу радиотехники, радиофизики, прикладной и теоретической механики. В поведении осциллятора находят многие разнообразные явления. Одна из универсальных моделей – осциллятор механический, электрический. Механический маятник - в основе часов. Колебательный контур электрического маятника, состоящий из самоиндукции и емкости – в основе радиопередатчика и радиоприемника.
Колебания называются периодическими, если значения физических величин, изменяющихся в процессе колебаний, повторяются через равные промежутки времени.
Период колебаний Т – наименьший промежуток времени, по истечении которого повторяются значения всех физических величин, характеризующих колебательное движение.
Отклонение х = f (t) – мгновенное перемещение относительно положения равновесия.
Амплитуда – А – максимальное абсолютное значение отклонения - максимальное отклонение Хmax, размах колебаний.
Частота колебаний n – число полных колебаний в единицу времени n = 1/Т (измеряется в герцах). Угловая частота w = 2p n = 2p / Т.
Фаза j = w t + j0. Характеризует мгновенное состояние колебательной системы и определяется двумя параметрами (отклонением и временем).
Зависимость от времени t, периодически колеблющейся физической величины S имеет вид:
S = S0 + х(t), где S0 – значение величины S в положении равновесия, х(t) – периодическая функция времени: х(t + T) = х(t).
Простейший тип периодических колебаний являются гармонические (синусоидальные) колебания:
х = A sinj = A sin(w t + j0) или x = A cos(w t + j1), где A,w, j0, j1 - постоянные величины, причем А > 0, w > 0, j1 = j0 + p/2. А – максимальное абсолютное значение х – амплитуда колебания.
Первая и вторая производная по времени от гармонически колеблющейся величины y также изменяется по гармоническому закону:
х’ = Aw cos(w t + j0) = A w sin(w t + j0 + p /2),
х’’ = - Aw2 sin (w t + j0) = Aw2 sin(w t + j0 + p) = - w2х.
Следовательно, гармонически колеблющаяся величина х удовлетворяет уравнению (дифференциальное уравнение гармонических колебаний): х’’ + w2х = 0.
Это же соотношение получается и из геометрического построения, поскольку гармонические колебания можно рассматривать как проекцию равномерного движения по окружности.
Гармонические колебания представляют собой движение с переменным ускорением – ускорение является функцией времени.
Гармоническое колебание может быть представлено графически с помощью вращающегося вектора амплитуды.
 Вектор А, численно равный амплитуде колебаний, равномерно вращается против часовой стрелки вокруг оси О, перпендикулярной плоскости чертежа, с угловой скоростью w. Если в момент времени t = 0 угол между вектором А и осью Ох равен j1, то проекция В конца этого вектора на ось Ох совершает гармонические колебания по закону x = A cos(w t + j1).
Вектор А, численно равный амплитуде колебаний, равномерно вращается против часовой стрелки вокруг оси О, перпендикулярной плоскости чертежа, с угловой скоростью w. Если в момент времени t = 0 угол между вектором А и осью Ох равен j1, то проекция В конца этого вектора на ось Ох совершает гармонические колебания по закону x = A cos(w t + j1).
Свободные колебания – колебания, которые возникают в системе, не подверженной действию внешних сил, в результате какого-либо начального отклонения этой системы от состояния начального равновесия.
При любых колебаниях отклонение системы вызывает появление восстанавливающей силы, которая стремится возвратить систему в положение равновесия. Линейный закон силы: восстанавливающая сила пропорциональна ускорению. Согласно основному закону динамики F = ma
При отклонении точки от положения равновесия потенциальная энергия возрастает, если после отклонения точка начнет движение, то при отсутствии сопротивления в силу закона сохранения энергии (кинетическая и потенциальная энергии системы равны) точка будет совершать незатухающие колебания относительно положения равновесия.
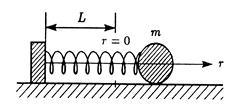
Движение шарика, присоединенного к пружине.
Рассмотрим модель движения шарика, присоединенного к пружине с жестко закрепленным концом.
Пусть r – координата шарика вдоль оси пружины, лежащей на горизонтальной плоскости. и направление движения шарика совпадает с ее осью. Тогда по второму закону динамики
 F = ma = md2r/dt2,
F = ma = md2r/dt2,
где m – масса шарика, а – его ускорение. Будем считать плоскость идеально гладкой (движение происходит без трения), пренебрежем сопротивлением воздуха и примем во внимание то, вес шарика уравновешивается реакцией плоскости.
Единственная сила, действующая на шарик в направлении оси r, очевидно, сила упругости пружины. Определим ее, используя закон Гука, гласящий, что для растяжения (сжатия) пружины необходимо приложить силу
F = - kr,
Где коэффициент k > 0 характеризует упругие свойства пружины, а r – величину ее растяжения или сжатия относительно нейтрального, ненагруженного положения r = 0. Уравнение шарика принимает вид (уравнение элементарного осциллятора)
 t > 0. (1)
t > 0. (1)
Оно описывает его гармонические колебания и имеет общее решение
r(t) = r0 /ω sinωt + r0 cos ωt r = A cos (ωt+φ), (2)
где  - частота колебаний пружины в отсутствии внешних сил или собственная частота колебаний системы "пружина – шарик", не зависящая от начальных условий и определяющая период Т = 2π/ω колебаний, измеряемый в секундах,
- частота колебаний пружины в отсутствии внешних сил или собственная частота колебаний системы "пружина – шарик", не зависящая от начальных условий и определяющая период Т = 2π/ω колебаний, измеряемый в секундах,  - амплитуда колебаний, φ = arctg(ω r0 / v0). В отличие от угловой частоты, измеряемой в рад/с, частотf колебаний f = 2πω измеряется в герцах.
- амплитуда колебаний, φ = arctg(ω r0 / v0). В отличие от угловой частоты, измеряемой в рад/с, частотf колебаний f = 2πω измеряется в герцах.
Значения коэффициентов определяются из начального состояния объекта, т.е. через величины r(t = 0) = r0 и v(t = 0) = v0 (v(t) - скорость шарика), причем r(t) ≡ 0 при r0 = v0 = 0.
Примеры иерархии модели.
Уточнение модели.
1. Пусть на шарик действует известная внешняя сила F (r, t), зависящая от времени и положения шарика. Она может порождаться полем тяготения, иметь электрическое или магнитное происхождение и т.д.
По сравнению с базовой моделью колебаний в правой части уравнения появляется дополнительный член – внешняя сила
md2r/dt2 = - kr + F (r, t).
Примем, что внешняя сила F постоянна F (r, t) = F0. Проводя замену r* = r - F0 / k, получаем для r*
d2r*/dt2 = - kr*,
т.е. постоянная сила не вносит изменений в процесс колебаний за тем исключением, что координата нейтральной точки, в которой сила, действующая на шарик равна нулю, сдвигается на величину F0 / k.
2. Рассмотрим случай, когда внешняя сила зависит от времени, для определенности примем эту зависимость периодической F (t) = F0 sinω1t:
md2r/dt2 = - kr + F (t) = - kr + F0 (t) = - kr + F0 sinω1t. (3)
Решение этого уравнения будем искать как сумму общего решения однородного уравнения (2) и частного решения неоднородного уравнения (3) в виде r1(t) = C sinω1t. Подстановкой этого выражения в (3) находим
С = F0 / (k - m ω12) = F0 / m (ω12 - ω12),
В итоге для общего решения системы (3) имеем

Внешняя сила F (t) приводит не только к появлению в системе дополнительных колебаний с частотой ω1, но и к возникновению резонанса – неограниченному росту амплитуды колебаний при ω1 → ω.
Учет силы трения.
Силы трения могут появиться по двум причинам: неидеальность поверхностей движения и сопротивление среды (воздуха, воды и т.п.).
В первом случае внешняя сила (сила трения) постоянна - пропорциональна весу и площади соприкосновения, не зависит от скорости и направлена против движения шарика (ее знак противоположен знаку скорости шарика).
Сила трения равна F = k1P, где – k1 коэффициент трения (на единицу поверхности), P = mg – вес шарика. Движение шарика подчиняется уравнению
md2r/dt2 = - kr – k1mg sign dr/dt.
Оно внешне похоже на уравнение с постоянной силой F0, но из-за знакопеременности не сводится к стандартному уравнению колебаний – эти уравнения описывают существенно разные процессы. В частности, амплитуда колебаний шарика существенно уменьшается со временем.
Во втором случае внешняя сила (сила трения) не постоянна - существенно зависит от скорости движения F = - μv, где коэффициент μ > 0 определяется размерами шарика, плотностью среды, ее вязкостью.
При малой вязкости в системе происходят затухающие со временем колебания, при большой вязкости колебания отсутствуют благодаря подавляющему действию сил вязкого трения.