Коробки швидкостей
Обробка на металорізальних верстатах ведеться з різною швидкістю різання в залежності від матеріалу заготовки, різального інструменту, наявності або відсутності охолодження й ін. Регулювати швидкість різання можна тільки шляхом зміни числа обертів у хвилину шпинделя верстату. Для регулювання числа обертів на верстаті мається спеціальний механізм — коробка швидкостей. Коробка швидкостей забезпечує одержання на шпинделі верстата різних чисел обертів у хвилину, що підлягають закономірності геометричної прогресії: кожне наступне число обертів отримується множенням попередніх на постійне число φ, що називається знаменником прогресії.
n2 = n1φ; n3 = n2φ = n1φφ = n1φ2; n4 = n1φ3; nmax = nminφк-1,
де к – число ступенів заданого ряду чисел обертів в хвилину;
nmax – максимальне число обертів в хвилину;
nmin – мінімальне число обертів в хвилину.
Незважаючи на різні конструкції верстатів, коробки швидкостей їх складаються з механізмів і деталей, що, як правило, маються у всіх верстатах. Найпростішим механізмом для зміни чисел обертів веденого валу при постійному числі обертів тягового валу є механізм із пересувним блоком (рис. 5.7). На тяговому валу І знаходиться пересувний блок Б, що сидить на шліцах (крутний момент від блоку до вала або від вала до блоку передається шліцами).

Рисунок 5.7 - Механізм з двійним пересувним блоком
На веденому валу ІІ закріплені нерухомо два зубчасті колеса . При правому положенні блоку Б в зачепленні знаходяться зубчасті колеса z2 і z4, передатне відношення буде: i1 =  .
.
При лівому положенні блоку Б в зачеплення ввійдуть зубчасті колеса z1 і z3, передатне відношення буде: : i2 =  .
.
У такий спосіб вал ІІ може мати два різних значення чисел обертів у хвилину.
Аналогічно влаштована передача з потрійним пересувним блоком, що дає три різних швидкості обертання веденому валу.
Переміщення блоків вздовж вала здійснюється спеціальним важільним механізмом, зв'язаним відповідною рукояткою, що знаходиться на передній стінці коробки швидкостей. Якщо скомпонувати послідовно два або кілька механізмів з пересувними блоками, то одержимо найпростішу коробку швидкостей (рис. 5.8).

Рисунок 5.8 - Проста коробка швидкостей з пересувними блоками:
1 – шпиндель.
Як видно з приведеної під рисунком таблиці 5.1, число різних чисел обертів у хвилину шпинделя дорівнює добутку можливих переключень блоків. У даному випадку воно складає 3 2 = 6.
2 = 6.
Таблиця 5.1-Розрахунок частот обертання шпинделя
| Положення блоків | Число обертів в хвилину веденого вала (шпинделя) | |
| Потрійний блок Б1 | Двійний блок Б2 | |

| ||

| ||

| ||

| ||

| ||
|
Окрім пересувних блоків в верстатах часто використовуються механізми із перемикаючою кулачковою муфтою.
На тяговому валу вільно сидять зубчасті колеса z1 z2, а на вeденому валу нерухомо закріплені два зубчасті колеса z3 і z4, сполучені відповідно z3 із z1, а z4 з z2. На торцях коліс z1 i z2 маються кулачки, а між зубчастими колесами на шліцах вала сидить кулачкова муфта М, що має також кулачки на торцях. У залежності від положення муфти передача руху від вала І до вала ІІ буде йти через зубчаті колеса z1 – z3 або через зубчаті колеса z2—z4 і на веденому валу можна одержати дві різні швидкості обертання.
Як правило, механізм із кулачковою муфтою компонується в коробках швидкостей у сполученні з пересувними блоками.
5.2.3 Типові елементи механізмів подач
У коробках подач різних верстатів, як і в коробках швидкостей, зустрічаються однакові по конструкції механізми.
Для перетворення обертального руху в поступальний використовуються гвинтові та рейкові пари.
Гвинтові пари. Гвинт, вкручуючись в гайку, робить одночасно обертальний і поступальний рухи, тобто гвинтова пара є найпростішим механізмом для перетворення обертального руху в поступальний. Якщо гвинт обертається, але уздовж своєї осі переміщатися не може, то гайка буде переміщатися по гвинту (рисунок 5.11) [10].

Рисунок 5.11 - Гвинтова пара: 1 – гайка, 2 – гвинт.
Гвинтові пари (гвинт — гайка) широко застосовуються в механізмах верстатів для перетворення обертального руху в поступальний: переміщення каретки супорта за допомогою ходового гвинта при нарізанні різьб, поперечна подача супорта за допомогою гвинта поперечної подачі і т.д. За один оберт гвинт переміщується в гайці (або гайка по гвинту) на один крок S, за n обертів гвинта переміщення гвинта або гайки складе S n мм. Якщо гвинт багатозахідний, то за n обертів гвинта осьове переміщення складе n•K мм, де К — число заходів гвинта.
n мм. Якщо гвинт багатозахідний, то за n обертів гвинта осьове переміщення складе n•K мм, де К — число заходів гвинта.
Ходові гвинти мають, як правило, трапецоїдну нарізь. Гайка гвинтової пари може бути цільною або рознімною (рис.5.12).

Рисунок 5.12 - Рознімна гайка: 1, 2 — напівгайки, 3 — диск зі спіральними прорізами, 4 — палець напівгайки, 5 — руків’я, 6 – ходовий гвинт.
Рознімна гайка складається з двох половинок (напівгайок) 1 і 2, що при включенні поступального руху замикаються на гвинті. У токарно-гвинторізних верстатів така рознімна гайка знаходиться у фартуху супорту. Замикання і розмикання напівгайок здійснюється за допомогою диска із спіральними прорізами і пальців 4, зв'язаних з напівгайками. Диск 3 повертають руків’ям 5.
Рейкова пара являє собою зубчасте колесо в сполученні з рейкою (рис.5.13), [10].
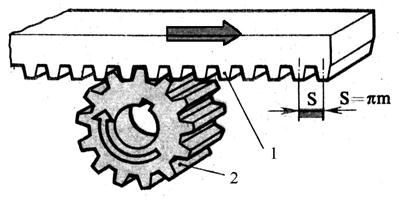
Рисунок 5.13 - Рейкова пара: 1 – рейка, 2 – зубчасте колесо.
Цей механізм також служить для перетворення обертального руху в поступальний (зубчасте колесо, що обертається, буде відштовхувати рейку, змушуючи її рухатись поступально. Якщо обертати зубчасте колесо по закріпленій рейці, то одночасно воно буде переміщатися поступально по рейці. При повороті зубчастого колеса на один зуб поступальне переміщення буде дорівнювати одному кроку, тобто πm. Якщо рейкове зубчасте колесо обертається зі швидкістю n об/хв, то за цей час шлях поступального руху рейки складе n•π•m мм.
У токарно-гвинторізних верстатах рейкова пара застосовується для здійснення автоматичного повздовжнього переміщення каретки супорта, і у механізмах керування.
5.3 Хід виконання роботи
1. Розрахувати передатне відношення пасової передачі на верстаті 16К20.
2. Ознайомитись з кінематичною схемою токарно-гвинторізного верстату 16К20.
3. Ознайомитись з основними механізмами коробки швидкостей токарно-гвинторізного верстату 16К20.
4. Ознайомитись з механізмами для перетворення обертального руху в поступальний, що застосовуються в верстаті 16К20.
5. Користуючись заданими кінематичними схемами верстатів розрахувати вихідні частоти обертання шпинделя верстату.
5.4 Контрольні запитання
1. Як розрахувати передатне відношення пасової передачі?
2. Як, знаючи число обертів тягового шківа, розрахувати число обертів веденого?
3. Що таке крок зубчастого колеса? Як він розраховується?
4. Що таке модуль зчеплення?
5. Як визначити передатне відношення зубчастої передачі?
6. Як, знаючи число обертів тягового зубчастого колеса, розрахувати оберти веденого?
7. Які бувають зубчасті колеса?
8. Що називають паразитними колесами в зубчастій передачі? Для чого вони використовуються?
9. Що таке кінематичний ланцюг?
10. Як знайти передатне відношення кінематичного ланцюга?
11. Що таке черв’ячна передача? Як знайти передатне відношення черв’ячної передачі?
12. Що таке коробка швидкостей верстату?
13. Яким закономірностям підпорядковані вихідні числа обертів шпинделя?
14. Які ви знаєте механізми коробки швидкостей?
15. Як розраховуються вихідні частоти обертання шпинделя верстату?
16. Назвіть типові механізми коробки подач МРВ.
ЛАБОРАТОРНА РОБОТА № 6
ОСНОВНІ КОНСТРУКТИВНІ ЕЛЕМЕНТИ ТА ГЕОМЕТРИЧНІ ПАРАМЕТРИ ТОКАРНОГО ПРОХІДНОГО РІЗЦЯ, ВИЗНАЧЕННЯ ОСНОВНИХ КУТІВ РІЗАЛЬНОЇ ЧАСТИНИ