рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Методические Указания
- /
- Краткая теория
Реферат Курсовая Конспект
Краткая теория
Краткая теория - Методические Указания, раздел Философия, Автоматизация технологических процессов и производств В Системах Контроля И Управления В Качестве Датчиков Угла Поворота Наряду С Р...
В системах контроля и управления в качестве датчиков угла поворота наряду с резисторными, индуктивными и емкостными датчиками применяют измерительные устройства на сельсинах и вращающихся трансформаторах.
Сельсины представляют собой малогабаритные самосинхронизирующиеся электрические машины переменного тока, сходные по конструкции с синхронными машинами. Сельсины бывают контактными (рис. 1.1) и бесконтактными (рис. 1.2). В контактных сельсинах на статоре размещают однофазную, а на роторе – трехфазную обмотки или наоборот. В бесконтактных сельсинах на статоре размещают обе обмотки, а ротор выполняют специальной конструкции с немагнитной прослойкой.
Ротор бесконтактного сельсина (рис. 1.2) выполнен из двух магнитопроводящих частей P1 и P2, разделенных немагнитным материалом K. Обмотка возбуждения ОВ неподвижна и выполнена в виде двух последовательно соединенных катушек f1 и f2. Внутри катушек свободно вращается ротор. Трехлучевая обмотка уложена в статоре, который представляет собой обычный статор электрической машины. Обмотки возбуждения, подключенные к источнику питания, создают магнитный поток, через ротор, статор и внешний магнитопровод проходящий по замкнутой цепи.
Основными режимами работы сельсинов являются индикаторный и трансформаторный. В обоих режимах одновременно используют два сельсина – сельсин-датчик (СД) и сельсин-приемник (СП). Индикаторный режим применяют для контроля и дистанционной передачи угла поворота и различных величин (уровня, давления, толщины материала, натяжения и т. д.), преобразованных предварительно в угловое перемещение, в тех случаях, когда на выходе не требуется значительного вращающего момента. Трансформаторный режим применяют для преобразования угла рассогласования двух механических не связанных осей в выходное напряжение.
В индикаторном режиме однофазные обмотки возбуждения (ОВ) СД и СП включают в общую однофазную цепь переменного тока, а трехфазные обмотки синхронизации соединяют между собой одноименными зажимами (рис. 1.3, а). Между СД и СП имеются только электрические связи.

Рис. 1.1. Конструктивные модификации контактных сельсинов
а – с однофазной явнополюсной обмоткой на статоре и трехфазной обмоткой на роторе;
б – с однофазной явнополюсной обмоткой на роторе и трехфазной обмоткой на статоре;
в – с однофазной неявнополюсной обмоткой на роторе и трехфазной обмоткой на статоре;
г – с трехфазными обмотками на роторе и на статоре; 1 – статор; 2 – ротор

Рис. 1.2. Конструкция бесконтактного сельсина

Рис. 1.3. Схемы включения сельсинов в индикаторном (а)
и трансформаторном (б) режимах и их статистические характеристики (в, г)
Переменный ток, протекающий по однофазным ОВ, создает в обоих сельсинах пульсирующие магнитные потоки Ф. Эти потоки индуктируют ЭДС в обмотках синхронизации СД и СП, действующие значения которых определяются по формулам:
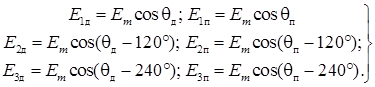
При согласованном положении роторов обоих сельсинов (θд = θп) в одинаковых фазах СД и СП будут индуктироваться равные по величине ЭДС. Эти ЭДС уравновешивают друг друга, так как обмотки синхронизации включены встречно. Следовательно, тока в обмотках синхронизации сельсинов при θд = θп не будет и роторы обоих сельсинов будут неподвижны.
При повороте ротора СД на угол θд > θп в обмотках синхронизации сельсинов возникнут токи
I = ΔE/(2Ζф),
где DЕ = Eп – Eд – результирующая ЭДС; Ζф – сопротивление одной фазы.
Эти токи, взаимодействуя с магнитным потоком ОВ, обусловят возникновение вращающего синхронизирующего момента Мс, который повернет ротор СП на угол θп. Величина момента
Mс = Mmaxj(q).
где Mmах – максимальный момент сельсина, определяемый его параметрами;
q = θд – θп – угол рассогласования.
Моментно-угловая зависимость Mс = j(q) является статической характеристикой сельсинной пары, работающей в индикаторном режиме (рис. 1.3, а). При малых углах рассогласования (θ < 30°) статическая характеристика линейна:
Mc = kq,
где k = Mc / q – коэффициент передачи, Н×м/град.
Точность дистанционной передачи сельсинными измерительными устройствами зависит от момента трения и нагрузки на валу. В зависимости от величины погрешности Δθ сельсины делят на три класса точности:
Ι – Δθ = ±0,75°, II – Δθ = ±1,5°; III – Δθ = ±2,5°.
В трансформаторном режиме работы сельсинов (рис. 1.3, б) угловое рассогласование между сельсинами (q = θд – θп) преобразуется в выходное напряжение. К сети переменного тока подключают только однофазную обмотку возбуждения СД, а однофазная обмотка СП, называемого сельсином-трансформатором (СТ), является выходной, с которой снимается напряжение Uвых. Пульсирующий магнитный поток Ф, создаваемый током ОВ сельсина-датчика, по-прежнему индуктирует Ε1д, E2д, E3д в трехфазной обмотке, под действием которых в обмотках сельсинов возникают токи
I1 = Ε1д / 2Z; I2 = E2д / 2Z; I3 = E3д / 2Z.
Эти токи создают в СТ магнитный поток Фт, направленный в зависимости от угла рассогласования под углом q = θд – θп к продольной оси выходной однофазной обмотки. В выходной обмотке наводится ЭДС Eвых » Uвых, являющаяся выходным сигналом: Uвых = Umax cos q.
Так как нулевой отсчет соответствует сдвигу роторов СД и СП на 90°, то
Uвых = Umax cos (q + 90°) = Umax sin q.
Зависимость Uвых = φ(θ) является статической характеристикой сельсинов в трансформаторном режиме (рис. 1.3, б). При малых углах рассогласования (sin q » q) выходное напряжение Uвых = kq, где k = Uвых /q – коэффициент передачи, В/град. Обычно для сельсинов Uвых mах = 50 ¸ 100 В, k = 0,55 ¸ 1,10 В/град. При повороте ротора СД в обратном направлении от согласованного (–qд) фаза выходного напряжения изменяется на 180°.
Сельсины, наряду с использованием в устройствах для преобразования и передачи угла поворота или вращения, применяются также в следящих системах.
– Конец работы –
Эта тема принадлежит разделу:
Автоматизация технологических процессов и производств
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕКСТИЛЬНЫЙ УНИВЕРСИТЕТ им А Н КОСЫГИНА... Учебно методический комплекс по специальности... МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ВЫПОЛНЕНИЯ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Краткая теория
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов