рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Методические Указания
- /
- Краткая теория
Реферат Курсовая Конспект
Краткая теория
Краткая теория - Методические Указания, раздел Философия, Автоматизация технологических процессов и производств Ленточные Машины Относятся К Оборудованию Прядильного Производства Текстильно...
Ленточные машины относятся к оборудованию прядильного производства текстильной промышленности. На них происходит сложение волокнистых лент и их вытягивание с большим коэффициентом вытяжки продукта, получаемого на чесальной машине. Одновременно волокна распрямляются и параллелизуются.
Контактная электрическая схема управления ленточной машиной широко используется вследствие простоты ее построения и обслуживания. Она является типовой для систем контактной автоматики в текстильной промышленности.
Схема управления ленточной машины обеспечивает возможности:
автоматического пуска и останова машины;
кратковременного пуска при заправке ленты;
останова машины при наработке ленты определенной длины;
останова машины при открывании ограждений;
автоматического останова машины при обрыве одной из лент (на машине 12 – 16 лент);
останова машины при коротком замыкании электрической цепи и превышении напряжения выше номинального на 20 – 25%;
обеспечения безопасной работы оператора.
Некоторые ленточные машины для хлопка и шерсти имеют автоматические регуляторы линейной плотности ленты.
Обрыв ленты может произойти вследствие малой ЛПМ ленты, вызванной нестабильностью вытяжки продукта. Возможен также сход ленты.
Датчик контроля обрыва ленты может быть различного типа. Наибольшее распространение в текстильной промышленности получили электроконтактные и фотоэлектрические датчики.
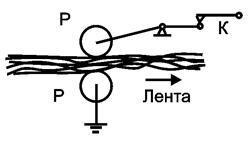
На рис. 7.1, а представлен эскиз электроконтактного датчика, а на рис. 7.2, б – эскиз фотоэлектрического.
В первом случае верхние ролики P, лежащие на ленте, изолированы движущейся лентой от нижних роликов и корпуса машины. При обрыве ленты верхний ролик падает на нижний и технологические контакты K замыкаются. В случае применения фотоэлектрического датчика при обрыве ленты световой поток от источника света ИС (в качестве которого могут быть использованы лампа накаливания или светодиод) падает на фотопреобразователь ФР. Фотопреобразователем является фотореле на фоторезисторе или фотодиоде. При освещении фоторезистора в случае обрыва ленты его электрическое сопротивление уменьшается и фотореле срабатывает, включая двигатель машины.
Достоинством фотоэлектрических датчиков является отсутствие воздействующего на продукт контакта.
| 
|
| а | б |
Рис. 7.1
Включение схемы осуществляется переключателем S1 (рис. 7.2). Контакты блокировки S3 должны быть замкнуты (ограждение закрыто). При случайном открывании ограждений контакт S3 размыкается, двигатель M отключается от сети. Схема управления обесточивается.
Для пуска машины нужно нажать кнопку S1, при этом ток начинает протекать в цепи катушки контактора K2, что вызывает замыкание замыкающих контактов K2.1–K2.3 в цепи питания двигателя M, который начинает работать. Одновременно замыкается замыкающий блок-контакт K2.4.
При включении переключателя F1 переменное напряжение подается также на трансформатор T2, вторичная обмотка которого обеспечивает питание контактных датчиков обрыва TK и реле K1. Проходящий по добавочному сопротивлению и катушке реле K1 ток включает реле K1. Замыкается контакт
K1.1, включенный последовательно с контактом K2.4, что приводит к блокировке кнопки S1. При отпускании кнопки S1 ток, питающий катушку контактора K2, протекает через замкнутые контакты K2.4 и K1.1, двигатель M остается включенным до тех пор, пока не поступит новый сигнал об изменении режима его работы.
Кратковременный режим работы машины может быть также осуществлен при замкнутых контактах ТК, что создает удобство при заправке ленты. В этом случае двигатель M будет включен на то время, в течение которого кнопка S1 будет нажатой. При отпускании кнопки катушка контактора K2 обесточивается, контакты в цепи двигателя M размыкаются и он останавливается.
Вторичная обмотка трансформатора T2 имеет напряжение 12 – 16 В, что обеспечивает безопасную работу оператора при прикосновении к роликовым технологическим контактам TK.
При обрыве лент технологические контакты TK замыкаются, верхний ролик соприкасается с нижним, шунтируется обмоткой реле K1; сопротивление цепи TK очень мало по сравнению с сопротивлением обмотки K1, поэтому практически весь ток потечет через TK. Реле K1 выключится, размыкая свой замыкающий контакт K1.1 в цепи катушки контактора K2, которая обесточится, поэтому разомкнутся контакты K2 в цепи двигателя M и он остановится.
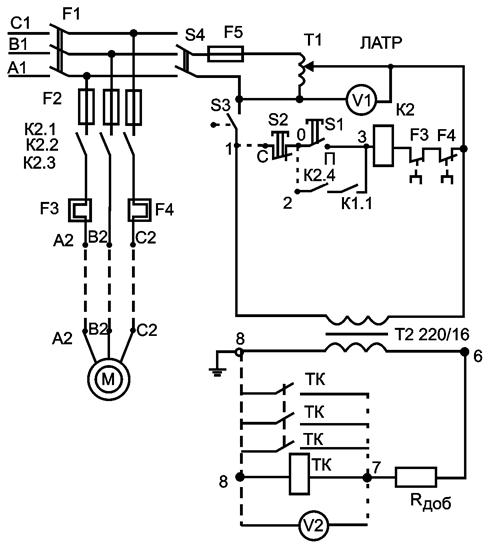
Рис. 7.2
Добавочное сопротивление Rдоб ограничивает ток при замкнутых контактах TK и тем самым предотвращает возможность короткого замыкания вторичной обмотки трансформатора T2.
Замыкающий контакт K2.4, включенный последовательно с контактом K1.1, также позволяет избежать случайных включений двигателя M, если произойдет случайное замыкание контакта K1.1.
При коротком замыкании электрической цепи (главной цепи или цепи управления) срабатывают плавкие предохранители F2 (отключая двигатель M от сети) или F5 (отключая схему управления).
При перегрузках тока на 20 – 25% больше нормального и увеличении внешней температуры срабатывают тепловые реле F3 и F4, контакты которых, установленные в цепи катушки контактора K2, размыкаются, вызывая включение контактора и останов двигателя M.
– Конец работы –
Эта тема принадлежит разделу:
Автоматизация технологических процессов и производств
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕКСТИЛЬНЫЙ УНИВЕРСИТЕТ им А Н КОСЫГИНА... Учебно методический комплекс по специальности... МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ВЫПОЛНЕНИЯ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Краткая теория
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.02 сек.
Новости и инфо для студентов