Основные положения
Одной из важнейших задач, возникающих при намотке нитей на бобину, а также при перемотке нитей или пряжи с одной бобины на другую, является стабилизация линейной скорости нити, обеспечивающая постоянство ее натяжения. Увеличение натяжения приводит к обрыву нити или пряжи, а уменьшение натяжения – к сходу нити с бобины и неравномерности намотки.
По мере наработки бобины радиус намотки меняется от R0 (радиус пустой бобины) до Rmax (радиус полностью наработанной бобины). Для упрощения расчетов в дальнейшем будем считать, что при изменении натяжения наматывания нить получает незначительное удлинение, которым можно пренебречь.
Тогда линейная скорость намотки нити на бобину равна
U =  , (8.1)
, (8.1)
где  – частота вращения бобины;
– частота вращения бобины;
R – текущий радиус намотки.
Если частота вращения бобины постоянна, что характерно для большинства существующих мотальных механизмов текстильного производства, то линейная скорость намотки нитей будет меняться пропорционально радиусу намотки R. Такое изменение скорости намотки приводит к двух- трехкратному увеличению натяжения по сравнению с заданным. С целью стабилизации линейной скорости намотки нитей на кафедре автоматики и промышленной электроники была разработана система стабилизации линейной скорости намотки, нашедшая применение в промышленности.
Структурная схема системы стабилизации представлена на рис. 8.1. Она включает в себя бобину Б, фотоэлектрический датчик радиуса намотки ДРН, блок сравнения БС, множительное устройство МнУ, тиристорную схему управления ТСУ, двигатель постоянного тока M, тахогенератор ТГ.
Датчик радиуса намотки ДРН преобразует изменение радиуса R намотки нитей на бобину Б в электрический сигнал UR При этом он суммирует приращение радиуса с его начальным значением. Электрический сигнал с ДРН (напряжение UR, равное сумме приращения) подается на первый вход множительного устройства МнУ; на второй вход подается напряжение с тахогенератора Uтг, пропорциональное частоте вращения бобины Тахогенератор служит датчиком частоты вращения бобины. На выходе МнУ формируется сигнал, равный произведению UR и Uтг, т. е.
Uмну = UR Uтг (8.2)

Рис. 8.1
Так как kтг = Uтг, а kR = UR, то, учитывая формулу (8.1), получим, что с выхода МнУ снимается сигнал, пропорциональный текущей линейной скорости U нити. Этот сигнал вычитается в блоке сравнения БС из сигнала заданной линейной скорости, и на выходе блока формируется сигнал управления
Uу = Uмну – U u зад (8.3)
Радиус намотки является незавиимой переменной в расматриваемой системе регулирования, и величина его в процессе наработки паковки постоянно меняется. При этом изменяется сигнал на выходе множительного устройства Uмну и возникающий сигнал управления, воздействуя тиристорной схемой управления ТСУ на электродвигатель M, меняет частоту вращения последнего так, чтобы линейная скорость U нити стремилась к заданному значению Uзад. Следовательно, в рассматриваемой системе управления линейная скорость нити является регулируемой координатой, а изменение частоты вращения двигателя M с бобиной Б – управляющим воздействием.
Датчик радиуса намотки, показанный на рис. 8.2, включает в себя осветитель 1, линзу 2, фотодиодную планку ФДП3, сумматор S 4. При увеличении радиуса намотки R фотодиоды на ФДП3 один за другим перекрываются (затемняются). Выходной сигнал сумматора
UR = UR0+U = UR0 +
= UR0 +  , (8.4)
, (8.4)
где UR0 – напряжение, пропорциональное начальному радиусу бобины;
U– приращение напряжения от изменения радиуса на
U1 – приращение напряжения при затемнении одного фотодиода;
i – число затемненых фотодиодов;
n – число фотодиодов в ФДП.
Таким образом обеспечивается линейная зависимость выходного напряжения ДРН от текущего радиуса намотки.
Расчет статических параметров системы
Наличие в системе стабилизации линейной скорости намотки нитей нелинейного блока МнУ делает всю систему нелинейной, однако при небольших изменениях радиуса намотки R можно осуществить линеаризацию системы регулирования и представить передаточную функцию объекта управления в виде усилительного элемента с коэффициентом передачи Koб.

Рис. 8.2
На рис. 8.3 показана структурная схема объекта, охваченного обратной связью. Общий вид статических характеристик системы стабилизации линейной скорости намотки нитей на бобину с различными коэффициентами обратной связи Kос показаны на рис. 8.4.
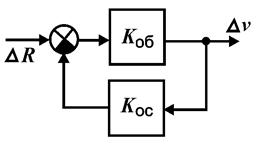
Рис. 8.3
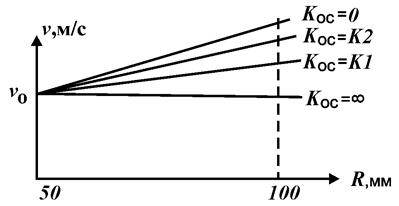
Рис. 8.4
Статическая ошибка в системах регулирования с пропорциональным регулятором зависит от возмущения R и коэффициента передачи замкнутой системы (см. рис. 8.3) и вычисляется по формуле
 Uстат = RKзс. (8.5)
Uстат = RKзс. (8.5)
Коэффициент передачи замкнутой системы регулирования
K3с = Kоб/(1+Kоб+Kос), (8.6)
где Kоб – коэффициент передачи объекта;
Kос – коэффициент обратной связи.
В лабораторной установке предусмотрено три значения коэффициента обратной связи: Kос = 0 (обратная связь разорвана, ключ B4 на рис. 8.4 разомкнут);
Kос = K1, Kос = K2
где K1 > K2
По экспериментально снятым характеристикам для каждого значения можно вычислить статическую ошибку (статизм системы регулирования), пользуясь выражением
 (8.7)
(8.7)
Коэффициент передачи объекта управления Kоб может быть определен из экспериментальной характеристики U = f(R) при разорванной обратной связи, т. е. при Kос = 0. При этом
Kоб =  (8.8)
(8.8)
Статический коэффициент передачи замкнутой системы для двух различных коэффициентов обратной связи можно определить по кривым 2, 3 (рис. 8.4) согласно выражению
Kзс = U /R. (8.9)
На основании полученных коэффициентов передачи для одного того же интервала изменения возмущения из формулы (8.5) можно определить коэффициент обратной связи:
Kос = (Kоб – Kос)/(Kоб – K3с). (8.10)