Краткая теория
Магнитные усилители (МУ) представляют собой усилители, принцип действия которых основан на использовании нелинейных характеристик ферромагнитных материалов.
Действия простейшего магнитного усилителя основано на переменной индуктивности дросселя насыщения, подключенного последовательно с сопротивлением нагрузки к источнику питания переменного тока несущей частоты.
Индуктивность (рис. 2.1, а) изменяется в зависимости от величин входного (управляющего) сигнала, что обусловливает изменение тока нагрузки. Действительно, ток нагрузки определяется равенством
 (2.1)
(2.1)
где  – индуктивность дросселя;
– индуктивность дросселя;
 – сопротивление нагрузки;
– сопротивление нагрузки;
 – частота переменного тока;
– частота переменного тока;
 – круговая частота.
– круговая частота.
Таким образом, поскольку индуктивность дросселя зависит от величины входного (управляющего) сигнала, т. е. = постольку нагрузка будет являться функцией Iу.
постольку нагрузка будет являться функцией Iу.
Чтобы при изменении индуктивного сопротивления дросселя
 имело место наибольшее изменение
имело место наибольшее изменение , необходимо, чтобы
, необходимо, чтобы
Для получения высокой индуктивности дросселя МУ выполняют на ферромагнитных сердечниках, при этом используются материалы, обладающие наиболее высокой магнитной проницаемостью в слабых магнитных полях. Индуктивность дросселя при прочих равных условиях пропорциональна магнитной проницаемости и определяется соотношением
 (2.2)
(2.2)
где W, S, l – соответственно число витков, площадь поперечного сечения, длина магнитной линии дросселя;
m – относительная магнитная проницаемость;
 – постоянная, характеризующая магнитные свойства вакуума.
– постоянная, характеризующая магнитные свойства вакуума.

| 
|
| а | б |
| 
|
| в | г |
| |
| д |
Рис. 2. 1
Входной сигнал подается в специальную обмотку МУ, которая называется обмоткой управления , или входной обмоткой (рис. 2.1, б). Обмотку, включенную в цепь нагрузки, называют обмоткой переменного тока, W
, или входной обмоткой (рис. 2.1, б). Обмотку, включенную в цепь нагрузки, называют обмоткой переменного тока, W рабочей, нагрузочной или выходной обмоткой.
рабочей, нагрузочной или выходной обмоткой.
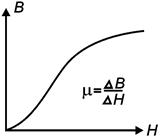
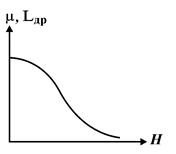
Характеристика намагничивания магнитного усилителя при однонаправленном (положительном) изменении тока в обмотке управления приведена на рис. 2.1, в. Магнитная проницаемость и пропорциональная ей индуктивность обмотки переменного тока (см. уравнение 2.2) изменяются, как показано на рис. 2.1, г.
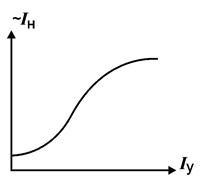
При этом ток нагрузки в функции тока управления изменяется по характеристике, показанной на рис. 2.1, д. При изменении знака тока управления эти характеристики располагаются симметрично относительно оси ординат.
Простейшая схема МУ (см. рис. 2.1, б) практически не используется, так как переменный магнитный поток будет создавать ЭДС в , которая будет искажать управляющий сигнал.

| 
|
| а | б |

| 
|
| в | г |

| 
|
| д | е |

| 
|
| ж | з |
Рис. 2.2
Для устранения этого недостатка простейший МУ выполняется на двух дросселях, обмотки переменного тока которых включаются так, чтобы составляющие магнитных потоков, создаваемых этими обмотками, не индуцировали ЭДС в Wу. При этом переменном токе составляющая магнитного потока, создаваемого одной обмоткой, должна находиться в противофазе с переменной составляющей магнитного потока, создаваемого другой обмоткой.
Основными параметрами МУ являются нормальное напряжение питания  , номинальное сопротивление
, номинальное сопротивление , ток нагрузки, номинальный ток управления Iу и коэффициенты усиления K
, ток нагрузки, номинальный ток управления Iу и коэффициенты усиления K , K
, K , K
, K . Схема включения магнитного усилителя без обратной связи показана на рис. 2.2, а. Его статическая характеристика соответствует рис. 2.2, б.
. Схема включения магнитного усилителя без обратной связи показана на рис. 2.2, а. Его статическая характеристика соответствует рис. 2.2, б.
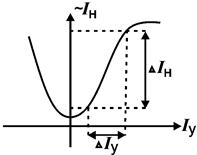
Коэффициент усиления МУ по току представляет собой отношение приращения тока в цепи нагрузки к приращению тока в цепи управления:
K (2.3)
(2.3)
Коэффициент усиления по напряжению
K= ( (2.4)
(2.4)
Коэффициент усиления по мощности
 (2.5)
(2.5)
Постоянное намагничивание в магнитных усилителях
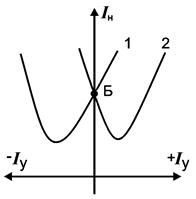
Во многих случаях необходима реакция усилителя на изменение полярности входного сигнала. Это обеспечивается введением постоянного подмагничивания, называемого смещением. Для постоянного подмагничивания обычно используется обмотка смещения  (рис. 2.2, в). Смещение, кроме того, позволяет выбрать рабочую точку усилителя на наиболее крутом участке его характеристики. На рис. 2.2, г приведены статические характеристики 1, 2 магнитного усилителя при разнополярных напряжениях смещения с рабочей точкой Б.
(рис. 2.2, в). Смещение, кроме того, позволяет выбрать рабочую точку усилителя на наиболее крутом участке его характеристики. На рис. 2.2, г приведены статические характеристики 1, 2 магнитного усилителя при разнополярных напряжениях смещения с рабочей точкой Б.
Магнитные усилители с обратной связью. Наибольшее практическое применение получили усилители с обратной связью. В этих усилителях большую часть подмагничивающего магнитного поля создает магнитное поле обмотки обратной связи (рис. 2.2, д). Если магнитное поле обратной связи имеет то же направление, что и магнитное поле, созданное управляющей обмоткой, то обратная связь называется положительной, а в противном случае – отрицательной. Очевидно, что положительная обратная связь увеличивает коэффициент усиления МУ, а отрицательная уменьшает его. Вследствие этого и статическая характеристика усилителя с обратной связью становится несимметричной относительно оси ординат.
Коэффициент усиления МУ с обратной связью
 (2. 6)
(2. 6)
знак (+) применяется для отрицательной обратной связи, знак (–) – для положительной обратной связи,  – коэффициент обратной связи.
– коэффициент обратной связи.
Магнитное поле обратной связи создается благодаря введению дополнительной обмотки  , называемой обмоткой обратной связи. При таком выполнении обратную связь называют внешней обратной связью. При положительной обратной связи крутизна рабочего участка характеристики возрастает (рис. 2.2, е).
, называемой обмоткой обратной связи. При таком выполнении обратную связь называют внешней обратной связью. При положительной обратной связи крутизна рабочего участка характеристики возрастает (рис. 2.2, е).
Широкое применение получила так называемая внутренняя обратная связь (рис. 2.2, ж). В этих случаях магнитное поле обратной связи создается благодаря обмоткам переменного тока. В цепь этих обмоток включаются диоды D1 и D2, вследствие чего в обмотках будет протекать пульсирующий ток, постоянная составляющая которого и создаст магнитное поле обратной связи.
МУ с внутренней обратной связью называют МУ с самонасыщением. Такой МУ обладает высоким коэффициентом усиления на рабочем участке статической характеристики (рис. 2.2, з).
Следует отметить, что число рабочих обмоток и обмоток управления в МУ может быть различным. Например, в МУ серии УМ имеется до пяти обмоток управления, а в МУ серии ТУМ – до семи. Эти обмотки выполняют разные функции, например суммирование сигналов, если на вход МУ подавать сигналы от различных датчиков.
Благодаря целому ряду положительных качеств МУ получили широкое распространение в системах автоматического управления. МУ долговечны, надежны в эксплуатации, не требуют особого ухода, малочувствительны к вибрациям, к значительным перегрузкам, позволяют просто осуществлять суммирование нескольких управляющих сигналов, имеют высокий коэффициент усиления.
Динамические свойства МУ определяются передаточной функцией
 (2. 7)
(2. 7)
где – частота переменного тока, Гц;
 – КПД цепи нагрузки МУ.
– КПД цепи нагрузки МУ.
Для магнитного усилителя с выходом на постоянном токе значение определяется по формуле


где  – сопротивление рабочей обмотки;
– сопротивление рабочей обмотки;
 – сопротивление выпрямителя.
– сопротивление выпрямителя.