рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Методические Указания
- /
- Краткая теория
Реферат Курсовая Конспект
Краткая теория
Краткая теория - Методические Указания, раздел Философия, Автоматизация технологических процессов и производств Феррорезонансный Стабилизатор Напряжения Переменного Тока – Это Нелинейный Че...
Феррорезонансный стабилизатор напряжения переменного тока – это нелинейный четырехполюсник, состоящий из соединенных определенным образом насыщенных и ненасыщенных дросселей и трансформаторов, сопротивлений и емкостей, обладающих нелинейной вольтамперной характеристикой.
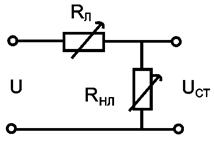
Поясним принцип работы стабилизатора напряжения на цепочке двух активных сопротивлений (рис. 5.1): линейного Rл и нелинейного Rнл, имеющего участок характеристики с Uнл = сonst (рис. 5.2). При изменении напряжения питающей сети от Umin до Umax ток, протекающий по сопротивлениям, возрастает от величины, соответствующей точке 1, до величины в точке 2. При этом избыток напряжения сети почти целиком уравновешивается возрастающим падением напряжения на линейном сопротивлении с Uл.min до Uл.max, а напряжение на нелинейном сопротивлении, являющееся выходным напряжением стабилизатора, возрастает лишь на . Очевидно, точность стабилизации целиком обусловлена горизонтальностью участка 1–2 вольтамперной характеристики нелинейного элемента и оценивается коэффициентом стабилизации
. Очевидно, точность стабилизации целиком обусловлена горизонтальностью участка 1–2 вольтамперной характеристики нелинейного элемента и оценивается коэффициентом стабилизации
показывающим, во сколько раз относительное изменение стабилизированного напряжения меньше относительного изменения напряжения сети.
Вследствие активных потерь в линейном и нелинейном элементах параметрические стабилизаторы на активных сопротивлениях имеют слишком низкий КПД, поэтому их применяют лишь для небольших мощностей – до нескольких ватт. В цепях переменного тока широко используют параметрические стабилизаторы на реактивных сопротивлениях, которыми служат обмотки с ферромагнитными сердечниками.
Если амплитуда индукции магнитного потока при работе стабилизатора не достигает индукции насыщения и сердечник работает на вертикальном участке кривой намагничивания, то такой элемент является линейным реактивным элементом – линейным дросселем Lл. Если же амплитуда индукции доведена до насыщения, то падение напряжения на таком дросселе мало изменяется с изменением тока и элемент служит нелинейным дросселем
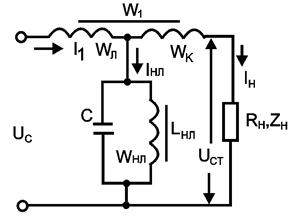
Последовательно соединенные линейные и нелинейные дроссели образуют простейший ферромагнитный стабилизатор (рис. 5.3).
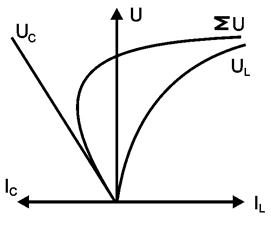
На рис. 5.4 построены вольтамперные характеристики нелинейного дросселя Lнл, конденсатора C и контура LнлC. Кривая показывает возможность работы на горизонтальном участке вольтамперной характеристики контура не только при индуктивном, но и при емкостном характере тока в неразветвленной части цепи, что способствует повышению cos стабилизатора в целом. В то же время из этой кривой видно, что вследствие негоризонтальности вольтамперной характеристики контура LнлC невозможно получить высокий коэффициент стабилизации без дополнительных устройств. Поэтому для компенсации небольшого возрастания напряжения на контуре при возрастающем напряжении сети в схему вводят компенсирующую обмотку Wк, располагая ее вместе с обмоткой на сердечнике линейного дросселя (рис. 5.4). ЭДС этой обмотки направлена навстречу напряжению контура и компенсирует его возрастание, сохраняя неизменным выходное напряжение стабилизаторов.
стабилизатора в целом. В то же время из этой кривой видно, что вследствие негоризонтальности вольтамперной характеристики контура LнлC невозможно получить высокий коэффициент стабилизации без дополнительных устройств. Поэтому для компенсации небольшого возрастания напряжения на контуре при возрастающем напряжении сети в схему вводят компенсирующую обмотку Wк, располагая ее вместе с обмоткой на сердечнике линейного дросселя (рис. 5.4). ЭДС этой обмотки направлена навстречу напряжению контура и компенсирует его возрастание, сохраняя неизменным выходное напряжение стабилизаторов.
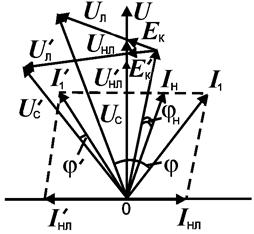
Работу стабилизатора этого вида удобно проследить на векторной диаграмме токов и напряжений (рис. 5.5), где буквенные обозначения со штрихом соответствуют минимальному напряжению сети Uc, а без штриха – максимальному. Диаграммы построены при нагрузке, имеющей индуктивный характер, который определяется сдвигом фаз между током нагрузки Iн и напряжением на ней Uст. Напряжение на линейном дросселе Uл и ЭДС компенсационной обмотки Ек приняты перпендикулярными вектору тока I1, потребляемого из сети и равного сумме токов нагрузки Iн и нелинейного контура Iнл, а ток Iнл перпендикулярен вектору напряжения на линейном контуре Uл
Таким образом, диаграмма построена для идеализированного стабилизатора, в котором дроссели приняты за чисто индуктивные сопротивления. Из диаграммы видно, что при низких напряжениях сети ток контура  емкостный и стабилизатор работает с высоким cos. По мере роста напряжения сети ток Iнл контура переходит в индуктивный и cosпонижается.
емкостный и стабилизатор работает с высоким cos. По мере роста напряжения сети ток Iнл контура переходит в индуктивный и cosпонижается.
Форма напряжения на выходе феррорезонансного стабилизатора содержит резко выраженную третью гармонику (рис. 5.6), так как поток в насыщенном сердечнике имеет трапецеидальную форму.
Время переходных процессов феррорезонансного стабилизатора напряжения при ступенчатом изменении входного сигнала (напряжения) или нагрузки составляет примерно 0,02с, поэтому такие стабилизаторы являются практически безынерционными.
Применение феррорезонансных стабилизаторов напряжения разнообразно. Они служат в качестве источников питания систем автоматики, радио, телевидения, фотометрии, рентгеновских установок, при всевозможных лабораторных испытаниях и т. п.
| 
|
| Рис. 5.1 | Рис. 5.2 |
| 
|
| Рис. 5.3 | Рис. 5.4 |
| 
|
| Рис. 5.5 | Рис. 5.6 |
Характеристики и параметры феррорезонансного стабилизатора напряжения. Основными статическими характеристиками феррорезонансного стабилизатора напряжения являются: зависимость выходного напряжения Uн = f1(Uвх) от изменения входного напряжения при разных уровнях нагрузки; зависимость выходного напряжения от тока нагрузки при равных уровнях входного напряжения Uн = f2(Iн). По этим характеристикам определяется требуемая точность стабилизации выходного напряжения и тока нагрузки.
Основным параметром стабилизатора напряжения является коэффициент стабилизации по напряжению:
где  Uвх = Uвх. мах – Uвх. min;
Uвх = Uвх. мах – Uвх. min;
Uвых = Uвых. max – Uвых. min.
– Конец работы –
Эта тема принадлежит разделу:
Автоматизация технологических процессов и производств
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕКСТИЛЬНЫЙ УНИВЕРСИТЕТ им А Н КОСЫГИНА... Учебно методический комплекс по специальности... МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ВЫПОЛНЕНИЯ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Краткая теория
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.03 сек.
Новости и инфо для студентов