рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Устойчивость простейшей динамической системы управления по линейному приближению ее математической модели
Реферат Курсовая Конспект
Устойчивость простейшей динамической системы управления по линейному приближению ее математической модели
Устойчивость простейшей динамической системы управления по линейному приближению ее математической модели - раздел Философия, ДИНАМИЧЕСКАЯ СИСТЕМА С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Если Использовать Полученную Структурную Схему Динамической С...
Если использовать полученную структурную схему динамической системы управления с исполнительным электродвигателем постоянного тока с независимым возбуждением без учета средств коррекции (см. рис. 17), то передаточная функция этой системы управления в замкнутом состоянии по ошибке (9) примет следующий вид:
 (60)
(60)
или при достаточно малом трении на объекте и на валу исполнительного двигателя, т.е. при  :
:
 . (61)
. (61)
В соответствии с известным алгебраическим критерием Раута-Гурвица, для того чтобы система управления, функционирование которой описывает математическая модель в виде передаточной функции (60) или (61), необходимо и достаточно выполнение следующих условий. Во-первых, все коэффициенты характеристического полинома в (60) или (61) должны быть с одним знаком, например, положительными. И, во-вторых, должно соблюдаться неравенство вида
 или
или  . (62)
. (62)
Если заданными требованиями к функционированию динамической системы управления предусмотрено обеспечение величины максимальной скорости отработки: ;  , максимальной допустимой ошибки
, максимальной допустимой ошибки  , то можно определить добротность этой системы управления по скорости, равную:
, то можно определить добротность этой системы управления по скорости, равную:
 . (63)
. (63)
Таким образом, для выполнения требований к системе по скорости должно быть обеспечено условие  .
.
Аналогично, если требованиями к функционированию динамической системы управления предусмотрено обеспечение величины максимального ускорения отработки:  при той же заданной максимальной допустимой ошибки
при той же заданной максимальной допустимой ошибки  , можно определить добротность этой системы управления по ускорению:
, можно определить добротность этой системы управления по ускорению:
 . (64)
. (64)
Но для этого необходимо с учетом (62) выполнения условия:
 . (65)
. (65)
Далее отметим, что динамическая система управления с электродвигателем постоянного тока с независимым возбуждением без средств коррекции структурно устойчива. Иными словами, всегда можно выбрать коэффициент усиления в прямой цепи системы, отвечающий условию (65).
Однако для обеспечения устойчивости в этом случае необходимо, чтобы электромагнитная постоянная времени  была достаточно малой. Практически такое условие невыполнимо.
была достаточно малой. Практически такое условие невыполнимо.
С другой стороны, применяя известную предельную теорему к (60) или (61), можно определить величины статической и скоростной ошибок рассматриваемой динамической системы управления.
Статическую ошибку определяет условие постоянства входного сигнала:
 . (66)
. (66)
При этом
 , (67)
, (67)
так как  ,
,  и
и  .
.
Такую динамическую систему управления принято называть астатической первого порядка.
Напомним, что порядок астатизма определяется показателем степени  в знаменателе передаточной функции в разомкнутом состоянии (6).
в знаменателе передаточной функции в разомкнутом состоянии (6).
Скоростную ошибку определяет условие постоянства задаваемой скорости:
 . (68)
. (68)
При этом
 .(69)
.(69)
Таким образом, скоростная ошибка динамической системы управления с астатизмом первого порядка прямо пропорциональна задаваемой скорости  и обратно пропорциональна коэффициенту усиления разомкнутой системы
и обратно пропорциональна коэффициенту усиления разомкнутой системы 
Очевидно, что, для того чтобы при некоторой максимальной постоянной задаваемой скорости  ошибка системы не превышала заданной, необходимо, чтобы коэффициент усиления в прямой цепи динамической системы был не менее ее добротности (63). Нетрудно убедится, что практически всегда это приводит к нарушению условий (62), а величина действительной ошибки при постоянной максимальной скорости всегда оказывается равной:
ошибка системы не превышала заданной, необходимо, чтобы коэффициент усиления в прямой цепи динамической системы был не менее ее добротности (63). Нетрудно убедится, что практически всегда это приводит к нарушению условий (62), а величина действительной ошибки при постоянной максимальной скорости всегда оказывается равной:
 . (70)
. (70)
Для уменьшения этой ошибки за счет обеспечения возможности поднять коэффициент усиления в прямой цепи динамической системы и применяются различные средства коррекции. Процесс синтеза средств коррекции называют процессом выбора законов управления этой динамической системы.
Выбор законов управления обеспечивается следующими способами:
1) введением в закон управления первой и более высоких производных от угла поворота исполнительной оси (объекта управления) с помощью местных отрицательных обратных связей;
2) использованием звена последовательной коррекции;
3) введением в закон управления первой и более высоких производных от угла рассогласования (ошибки) с помощью местных отрицательных обратных связей и компенсационных сигналов, пропорциональных первой и более высоким производным от угла поворота командной оси.
На структурной схеме рис. 16 первому способу соответствуют цепи с коэффициентами передачи  , второму - звено с передаточной функцией
, второму - звено с передаточной функцией  , третьему - цепи с коэффициентами передачи
, третьему - цепи с коэффициентами передачи  и
и  .
.
В качестве примера покажем, как это сказывается на функционировании динамической системы управления с передаточной функцией (60), т.е. когда коэффициент трения  .
.
Вначале представим структурную схему рис. 17 в виде рис 18.
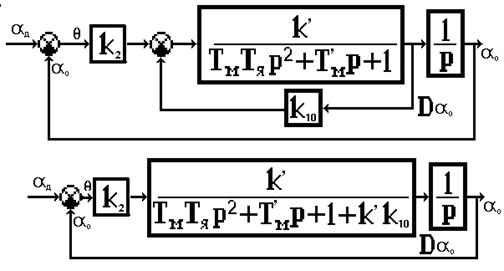 |
Рис.18. Структурная схема с введение первой производной 
Очевидно, что в этом случае передаточная функция системы в разомкнутом состоянии с учетом местной обратной связи примет вид
 . (71)
. (71)
Передаточная функция этой системы управления в замкнутом состоянии по ошибке (9) запишется как
 . (72)
. (72)
Неравенство (62) преобразуется к виду
 ., (73)
., (73)
а условие устойчивости (63) динамической системы управления в зависимости от значения  :
:
 . (74)
. (74)
Таким образом, полученное соотношение (74) позволяет определить значение коэффициента  в цепи обратной связи, которое гарантирует устойчивость динамической системы с электродвигателем постоянного тока с независимым возбуждением в качестве исполнительного двигателя при соответствующем увеличении значения коэффициента усиления
в цепи обратной связи, которое гарантирует устойчивость динамической системы с электродвигателем постоянного тока с независимым возбуждением в качестве исполнительного двигателя при соответствующем увеличении значения коэффициента усиления  в прямой цепи.
в прямой цепи.
Так, если выбрать величину коэффициента обратной связи (74)
 , (75)
, (75)
а в пределе
 , (76)
, (76)
соответственно, то система управления останется устойчивой при сколь угодно большом коэффициенте усиления:
 . (77)
. (77)
При этом установившаяся статическая ошибка останется равной нулю, а скоростная определится из того, что
 . (78)
. (78)
Первое слагаемое этой ошибки может быть уменьшено за счет выбора достаточно большого коэффициента усиления  , а второе мало потому, что коэффициент обратной связи по скорости
, а второе мало потому, что коэффициент обратной связи по скорости  по абсолютной величине также мал, а крутизна чувствительного элемента обычно больше единицы.
по абсолютной величине также мал, а крутизна чувствительного элемента обычно больше единицы.
Аналогичный результат может быть получен при введении в закон управления второй производной от угла поворота исполнительной оси. Покажем это также на примере, когда коэффициент трения  . Структурная схема для этого случая примет вид рис. 19.
. Структурная схема для этого случая примет вид рис. 19.

Рис. 19. Структурная схема с введение второй производной 
Передаточная функция (70) с учетом отрицательной местной обратной связи в этом случае примет вид:
 , (79)
, (79)
а передаточная функция системы в замкнутом состоянии по ошибке (74)
 . (80)
. (80)
Условие устойчивости (63) динамической системы управления в зависимости от значения  определится из неравенства
определится из неравенства
 , (81)
, (81)
откуда:
 ., (82)
., (82)
Тогда, если выбрать величину коэффициента обратной связи
 , (83)
, (83)
а в пределе
 , (84)
, (84)
соответственно, то система управления останется устойчивой при сколь угодно большом коэффициенте усиления:
. (85)
При этом установившаяся статическая ошибка останется равной нулю, а скоростная определится из того, что
 (86)
(86)
и, следовательно, может стать сколь угодно малой с ростом  , так как всегда справедливо
, так как всегда справедливо  .
.
– Конец работы –
Эта тема принадлежит разделу:
ДИНАМИЧЕСКАЯ СИСТЕМА С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
ДИНАМИЧЕСКАЯ СИСТЕМА... С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Устойчивость простейшей динамической системы управления по линейному приближению ее математической модели
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.146 сек.
Новости и инфо для студентов