ПЛОСКАЯ СИСТЕМА СИЛ
2.1. Условия равновесия плоской системы сил
Рассмотрим систему сил  , расположенных в одной плоскости. Главный вектор системы лежит в этой плоскости, а вектор главного момента, как и его составляющие, всегда ортогонален ей.
, расположенных в одной плоскости. Главный вектор системы лежит в этой плоскости, а вектор главного момента, как и его составляющие, всегда ортогонален ей.
Если в рассматриваемой плоскости введем систему координат Оxy, то для равновесия плоской системы сил необходимо и достаточно соблюдение следующих условий:
 (1)
(1)
Возможны и другие формы условий равновесия плоской системы сил, эквивалентные (1), например
 ,
,  ,
,  (2)
(2)
2.2. Определение реакций связей
Определение реакций связей тел и системы тел является одной из основных задач статики и первым шагом ее решения является построение силовой схемы.
Если уравнений равновесия достаточно для определения всех неизвестных усилий (включая реакции связей), то задачу по их определению и само исследуемое тело или систему тел (конструкцию) называют статически определимыми.
Если уравнений равновесия недостаточно для определения неизвестных усилий (включая реакции связей) системы, то ее, как и соответствующую ей задачу, называют статически неопределимыми. Методы решения статически неопределимых задач будем изучать в разделе «строительная механика».
Напомним, что различают внутренние и внешние связи. Внутренними называют связи, соединяющие между собой части составной конструкции и тела в систему тел. Внешними являются связи, соединяющие систему с телами, в нее не входящими, например, соединяющие систему тел с землей. Соответственно и реакции связей будем делить на внешние и внутренние. Таким образом, внешние реакции - это реакции опор, внутренние - это силы взаимодействия тел системы.
На следующих рисунках приведены примеры силового анализа – составления силовой схемы тел для двухопорной и консольной балок.
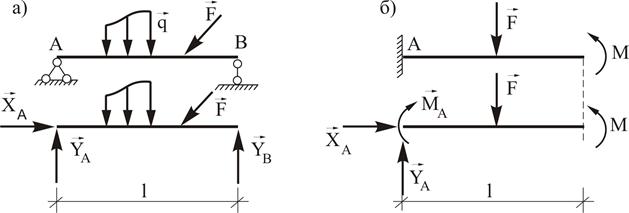
|
При рассмотрении составных конструкций – систем тел удобно воспользоваться методом расчленения системы на составляющие ее части. При этом следует помнить, что, согласно аксиоме о действии и противодействии, реакции внутренних связей равны по величине (модулю) и противоположны по направлению *. Условия равновесия составляют для каждого из тел системы
|
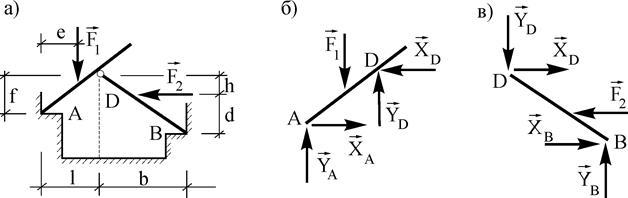 Рис.7.4
Рис.7.4
|
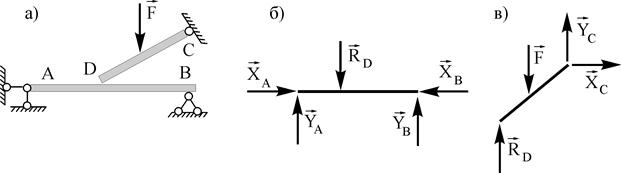
Рассмотрим пример составления уравнений равновесия при условии, что известны F1, F2 и все размеры конструкции:
Система расчленяется на два тела. При расчленении системы и рассмотрении равновесия составляющих ее частей мы получаем возможность перевести внутренние реакции связей в разряд внешних. Как видно из силовой схемы количество неизвестных реакций равно шести. Следовательно, задача по их определению и сама конструкция статически определимы.
Условия и уравнения равновесия части АД:



 :
: 
Условия и соответствующие им уравнения равновесия ВД:

 :
: 
Во избежание утомительных решений систем алгебраических уравнений равновесия следует варьировать формы применения условий равновесия и, в частности, выбирать моментные точки так, чтобы по возможности в каждое из рассматриваемых уравнений системы входило по одному еще не определенному неизвестному. Если значение какой-либо реакции получилось отрицательным, то это означает, что истинное направление ее противоположно указанному на силовой схеме.
3. Центр тяжести
При рассмотрении материальных тел, размерами которых можно пренебречь по сравнению с радиусом Земли, силы тяжести частей, составляющих тело, можно приближенно считать системой параллельных сил. Центром тяжести твердого тела называют неизменно связанную с этим телом точку С, через которую проходит линия действия равнодействующей сил тяжести частиц данного тела при любых его положениях в пространстве.
Ограничимся рассмотрением методов определения центров тяжести плоских фигур. Для однородного тела, имеющего форму тонкой пластины постоянной толщины, существуют следующие формулы для определения координат ее центра тяжести:
 (16)
(16)
где
 (17)
(17)
- осевые статические моменты плоской фигуры относительно осей x и y, лежащих в ее плоскости;  - площадь фигуры, Ak, xk, yk - площади и координаты центров тяжести частей, составляющих фигуру.
- площадь фигуры, Ak, xk, yk - площади и координаты центров тяжести частей, составляющих фигуру.
Основным свойством статического момента является то, что он равен нулю относительно осей, проходящих через центр тяжести фигуры. Отсюда, в частности, следует, что если однородное тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит, соответственно, в этой плоскости, на этой оси или в этом центре.
Метод разбиения тела на части и метод отрицательных масс непосредственно определен формулами (16), (17). Разбиение фигуры производится на части, положения центров тяжести и площади которых могут быть легко определены. Метод отрицательных масс предполагает присвоение отрицательного знака площадям вырезов при рассмотрении многосвязных фигур.
Метод интегрирования работает при неприемлемости описанных выше формул, когда фигуру приходится разбивать на множество дифференциально малых частей. В пределе, при стремлении всех Ak к нулю, в (16) статические моменты следует считать согласно выражениям

4. Расчет ферм
Фермой называют стержневую систему, которая остается геометрически неизменяемой после условной замены в расчетной схеме жестких узлов шарнирами. Будем рассматривать лишь плоские фермы, у которых все стержни находятся в одной плоскости. Узлы - места соединения стержней фермы. Внешние нагрузки прикладывают в узлах фермы, поэтому каждый из ее стержней испытывает лишь растяжение или сжатие, т.е. находится под действием равных по величине и противоположно направленных осевых усилий.
Будем предполагать, что все силы, действующие на ферму, расположены в ее плоскости. Усилия в стержнях определяют согласно методу сечения, исходя при этом из следующих соображений: поскольку вся ферма под действием внешних сил и реакций опор находится в равновесии, то в равновесии находятся и ее части. В зависимости от вида этих частей различают следующие методы определения усилий:
а). Метод вырезания узлов. Усилия, действующие на узел, представляют собой плоскую систему сходящихся сил, и, следовательно, для определения неизвестных в нашем распоряжении лишь два условия равновесия, то есть ;
;
б). Метод Риттера предполагает рассмотрение равновесия любой из двух частей фермы, полученных в результате ее сечения. Необходимость удовлетворения трем условиям равновесия рассматриваемой плоской системы сил обусловливает требование попадания в разрез не более трех стержней с неизвестными усилиями. Если линии действия двух из трех неизвестных усилий имеют точку пересечения, то можно записать условие равенства нулю моментов сил, действующих на рассматриваемую часть фермы, относительно этой точки, которую называют «моментной». В результате получим уравнение с одним неизвестным, что, естественно, удобно.
Преимущество метода Риттера по сравнению с методом вырезания узлов в том, что усилие в любом стержне можно определить независимо от ранее найденных значений усилий в других стержнях и, следовательно, не происходит накопления ошибок вычислений.
В качестве примера приложения метода сечений определим усилия в стержнях АВ, ВД, ДС фермы, изображенной на рис.9,а. Рассмотрим сечение 1-1. Равновесие правой части фермы (рис.9,б) позволяет записать следующие три условия равенства нулю моментов относительно «моментных» точек:


 .
.
|
При определении NAB, NВД оказалось удобным воспользоваться теоремой Вариньона. Так, например,
 .
.
Поскольку при проектировании фермы важно знать растянут или сжат тот или иной стержень, рекомендуем в силовых схемах частей фермы усилия изображать так, чтобы они вызывали растяжение стержня. Если численный результат определения усилия окажется отрицательным, то это означает, что соответствующий стержень сжат, в противном случае - растянут.