Донецьк – 2013
Цель работы: изучение статических характеристик асинхронного двигателя при питании от преобразователя частоты с автономным инвертором напряжения, изучение регулировочных свойств электропривода и параметрического программирования преобразователя ALTIVAR5, получение навыков работы с иностранной преобразовательной техникой.
Рисунок 6.1 – Упрощенная принципиальная схема стенда № 6.
Таблица 6.1 – Экспериментальные данные (квадратичный закон управления Р).
| f, Гц | |||||||||
| U, В | |||||||||
| n, об/мин |
Таблица 6.2 – Экспериментальные данные (линейный закон управления L).
| f, Гц | |||||||||
| U, В | |||||||||
| n, об/мин |
На основании полученных данных построим график зависимости U(f) (рис 6.2).
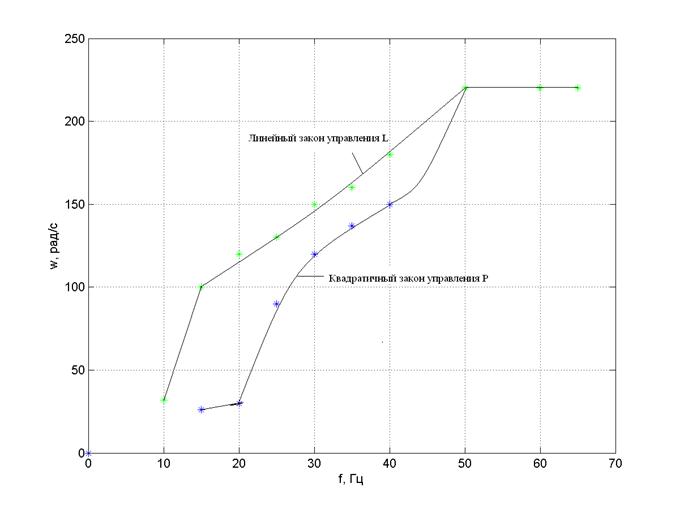
Рисунок 6.2 – График зависимости U(f) при квадратичном и линейном законах управления.
Построение статических характеристик. Линейный закон управления L.
Таблица 6.3 – при f=50Гц.
| I2, А | 2.5 | ||||
| I1, А | 2.6 | 2.5 | 1.9 | 1.7 | 1.5 |
| ω, рад/с | 96.3 | 98.4 | 100.5 | 100.5 | |
| M, Нм | 25.4 | 19.05 | 12.7 | 6.35 | 3.17 |
Таблица 6.4 – при f=60Гц.
| I2, А | 2.5 | ||||
| I1, А | 2.6 | 1.6 | 1.3 | 0.9 | |
| ω, рад/с | 117.3 | 121.3 | 121.5 | 121.9 | |
| M, Нм | 25.4 | 19.05 | 12.7 | 6.35 | 3.17 |
Таблица 6.5 – при f=35Гц.
| I2, А | 2.5 | ||||
| I1, А | 1.6 | 0.8 | 0.8 | ||
| ω, рад/с | 54.45 | 58.6 | 62.8 | 64.9 | 64.9 |
| M, Нм | 25.4 | 19.05 | 12.7 | 6.35 | 3.17 |
Таблица 6.6 – при f=25Гц.
| I2, А | 2.5 | |
| I1, А | 1.4 | 0.8 |
| ω, рад/с | 20.9 | 37.7 |
| M, Нм | 6.35 | 3.17 |
Построение статических характеристик. Квадратичный закон управления Р.
Таблица 6.7 – при f=35 Гц.
| I2, А | 2.5 | ||||
| I1, А | 1.6 | 1.2 | 0.9 | ||
| ω, рад/с | 54.45 | 58.6 | 62.83 | 64.9 | 64.9 |
| M, Нм | 25.4 | 19.05 | 12.7 | 6.35 | 3.17 |
Таблица 6.8 – при f=25Гц.
| I2, А | 2.5 | |||
| I1, А | 0.8 | 0.6 | ||
| ω, рад/с | 37.7 | 37.7 | 41.9 | 41.9 |
| M, Нм | 19.05 | 12.7 | 6.35 | 3.17 |
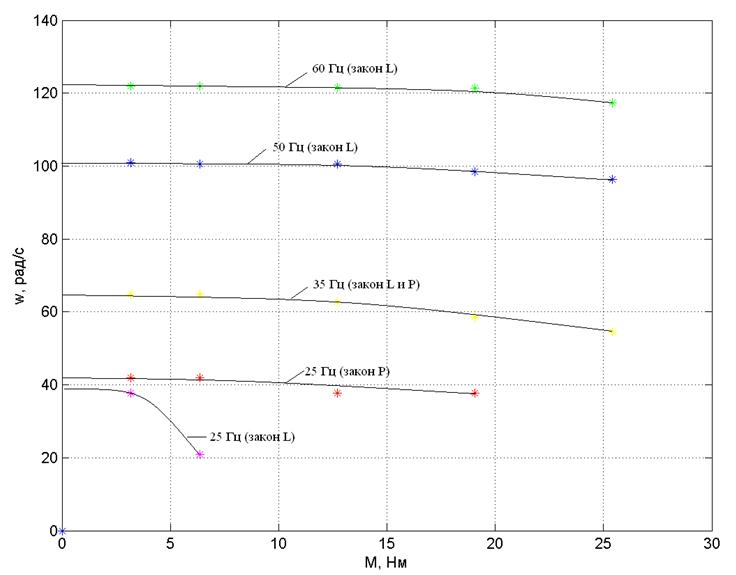
Рисунок 6.3 – Статические механические характеристики при линейном L и квадратичном P законах управления.
Расчеты, необходимые для посторения статических механических характеристик:

 Нм
Нм
 Нм
Нм
 Нм
Нм
 Нм
Нм
 Нм
Нм
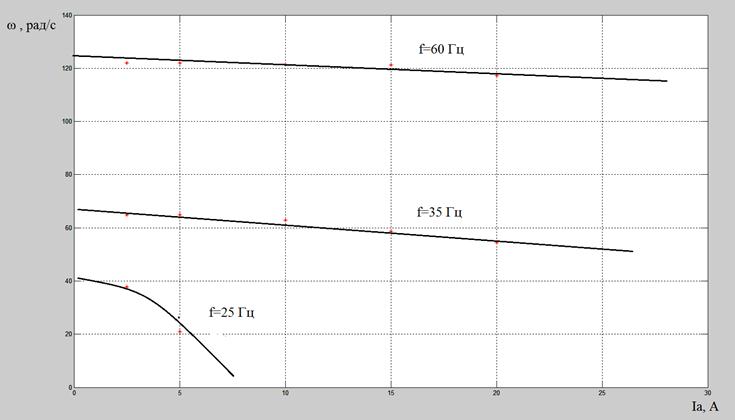
Рисунок 6.4 – Скоростные характеристики (Линейный закон).