Параметризация многозвенного механизма.
В качестве примера рассмотрим порядок параметризации механизма, изображенного на рис. 19. Положение механизма определяется углом наклона  кривошипа ОА, отсчитываемого от горизонтали.
кривошипа ОА, отсчитываемого от горизонтали.
Рис. 19
Данный механизм состоит из следующих частей:
- звенья ОА и АВ образуют кривошипно-ползунный механизм,
- звенья ОА, АС и DC образуют трехзвенник с базовым звеном ОА,
- звенья EF и GF образуют угол,
- звенья DC, CH и IH образуют трехзвенник с базовым звеном DC,
- звенья IH и IJ образуют коромысло,
- звенья IJ и JK образуют кривошипно-ползунный механизм.
При параметризации в свойствах маркеров необходимо использовать следующие функции:
1) Параметризация звеньев ОА и АВ: для обеспечения постоянства длин в строке Location необходимо записать
для маркера m2: LOC_RELATIVE_TO({ ,0,0},m1),
,0,0},m1),
для маркера m4: LOC_RELATIVE_TO({ ,0,0},m3).
,0,0},m3).
Для обеспечения правильного угла наклона звена OA создать дизайн-переменную DV_FI и в строке Orientation маркера m1 записать (DV_FI),0,0. Для обеспечения правильного угла наклона звена АВ необходимо создать дизайн-переменную DV_PSI, значение которой будет вычисляться с учетом того, что ползун механизма движется вдоль вертикальной прямой. Согласно (2) можно записать
 . (5)
. (5)
Здесь углы  и
и  имеют тот же смысл, что и углы
имеют тот же смысл, что и углы  и
и  в (1), то есть углы между звеньями механизма и прямой, по которой движется ползун. Однако в ADAMS используются истинные углы наклона, отсчитываемые от положительного направления оси Х. Следовательно для данного механизма будем иметь
в (1), то есть углы между звеньями механизма и прямой, по которой движется ползун. Однако в ADAMS используются истинные углы наклона, отсчитываемые от положительного направления оси Х. Следовательно для данного механизма будем иметь  ;
;  см. рис. 20.
см. рис. 20.
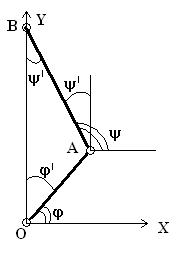
Рис. 20.
Подставляя выражение для и в (2) получаем
 ,
,
или
 .
.
Выражая отсюда угол получаем, что значение дизайн - переменной DV_PSI будет следующим:
 .
.
После того, как переменная DV_PSI будет создана, ее название необходимо записать в строке ORIENTATION маркера m3: (DV_PSI),0,0.
После этого необходимо, изменяя значение переменной DV_FI убедиться, что механизм работает правильно.
2) Параметризация трехзвенника ОАСD. В трехзвеннике ОАСD звено ОА уже параметризировано, поэтому необходимо параметризировать оставшиеся звенья с учетом того, что они образуют конструкцию «угол». Для этого необходимо использовать функции параметризации согласно таблице 2.
Таблица 2
| Маркер | Параметр | Функция |
| m5 | Location | LOC_RELATIVE_TO({0,0,0}, m2) |
| m5 | Orientation | ORI_ALONG_AXIS(m5, m8,”x”) |
| m6 | Location | LOC_RELATIVE_TO({ ,0,0}, m5) ,0,0}, m5)
|
| m7 | Orientation | ORI_ALONG_AXIS(m7, m6,”x”). |
| m8 | Location | LOC_RELATIVE_TO({ ,0,0}, m7) ,0,0}, m7)
|
3) Параметризация угла EFG происходит следующим образом. Звено EF создается от точки E к точке F, а не наоборот. При этом положение маркера 13 может быть произвольным. Звено GF создается от точки G к точке F. При этом положение маркера m11 должно соответствовать исходным данным задачи. Используемые функции параметризации приведены в таблице 3.
Таблица 3.
| Маркер | Параметр | Функция |
| m13 | Location | LOC_ALONG_AXIS(m9, m10, ) )
|
| m13 | Orientation | ORI_ALONG_AXIS(m13, m12,”x”) |
| m14 | Location | LOC_RELATIVE_TO({ ,0,0}, m13) ,0,0}, m13)
|
| m11 | Orientation | ORI_ALONG_AXIS(m11, m14,”x”). |
| m12 | Location | LOC_RELATIVE_TO({ ,0,0}, m12) ,0,0}, m12)
|
4) Параметризация трехзвенника СDHI происходит аналогично параметризации трехзвенника ОАСD. При этом звено HJ разбивается на два звена IH и IJ. Используемые функции параметризации показаны в таблице 4.
Таблица 4.
| Маркер | Параметр | Функция |
| m9 | Location | LOC_RELATIVE_TO({0,0,0}, m8) |
| m9 | Orientation | ORI_ALONG_AXIS(m9, m15,”x”) |
| m10 | Location | LOC_RELATIVE_TO({ ,0,0}, m9) ,0,0}, m9)
|
| m15 | Orientation | ORI_ALONG_AXIS(m16, m10,”x”). |
| m16 | Location | LOC_RELATIVE_TO({ ,0,0}, m7) ,0,0}, m7)
|
5) Параметризация коромысла HJ. В коромысле HJ звено IH уже параметризировано, поэтому необходимо использовать функции параметризации только для маркеров звена IH согласно таблицы 5.
Таблица 5.
| Маркер | Параметр | Функция |
| m17 | Location | LOC_RELATIVE_TO({0,0,0}, m15) |
| m17 | Orientation | ORI_RELATIVE_TO({180,0,0}, m15) |
| m18 | Location | LOC_RELATIVE_TO({ ,0,0}, m17) ,0,0}, m17)
|
6) Параметризация кривошипно-ползунного механизма, образованного звеньями IJ и JK. Данный кривошипно-ползунный механизм имеет ненулевой эксцентриситет  . Углы и показаны на рис. 21.
. Углы и показаны на рис. 21.
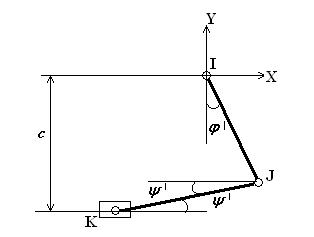
Рис. 21.
Поскольку угол наклона звена IJ заранее неизвестен, для его определения нужно использовать функцию AZ. Для этого необходимо добавить к фундаменту маркер m_gr в точке I и ориентировать его таким образом, что бы его ось Х была направлена вниз. Теперь угол будет вычисляться как
 , (4)
, (4)
его можно использовать для вычисления угла . Для непосредственного использования угла необходимо создать дизайн – переменную DV_1, в строке выражения которой записать функцию PSI из (4).
Выражение для истинного угла наклона звена JK будет иметь вид
 .
.
Выражая и подставляя его в (1) с учетом эксцентриситета получаем
 ,
,
откуда
 (6)
(6)
Для использования угла в ADAMS необходимо создать дизайн –переменную DV_PSI1, в строке выражения которой необходимо записать правую часть (6). После этого переменную DV_PSI1 необходимо вставить в строку Orientation маркера m19.
Таким образом, механизм будет полностью параметризирован углом поворота базового кривошипа. В приложении приведен полный листинг пакетного файла с данной моделью.
Приложение
!
!-------------------------- Default Units for Model ------------------------!
!
!
defaults units &
length = mm &
angle = deg &
force = newton &
mass = kg &
time = sec
!
defaults units &
coordinate_system_type = cartesian &
orientation_type = body313
!
!------------------------ Default Attributes for Model --------------------!
!
!
defaults attributes &
inheritance = bottom_up &
icon_visibility = on &
grid_visibility = off &
size_of_icons = 25.0 &
spacing_for_grid = 1000.0
!
!------------------------------ Adams/View Model ---------------------------!
!
!
model create &
model_name = model_1
!
view erase
!
!--------------------------------- Materials -------------------------------!
!
!
material create &
material_name = .model_1.steel &
youngs_modulus = 2.07E+005 &
poissons_ratio = 0.29 &
density = 7.801E-006
!
!-------------------------------- Rigid Parts ------------------------------!
!
! Create parts and their dependent markers and graphics
!
!----------------------------------- ground --------------------------------!
!
!
! ****** Ground Part ******
!
defaults model &
part_name = ground
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.ground.MARKER_21 &
adams_id = 21 &
location = 600.0, 400.0, 0.0 &
orientation = 270.0d, 0.0d, 0.0d
!
part create rigid_body mass_properties &
part_name = .model_1.ground &
material_type = .model_1.steel
!
part attributes &
part_name = .model_1.ground &
name_visibility = off
!
!----------------------------------- PART_2 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_2 &
adams_id = 2 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_2
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_2.MARKER_1 &
adams_id = 1 &
location = 0.0, 0.0, 0.0 &
orientation = 60.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_2.MARKER_2 &
adams_id = 2 &
location = 100.0, 173.2050807569, 0.0 &
orientation = 135.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_2.cm &
location = 50.0, 86.6025403784, 0.0 &
orientation = 330.0d, 90.0000000229d, 359.9999765869d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_2 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_2.LINK_1 &
i_marker = .model_1.PART_2.MARKER_1 &
j_marker = .model_1.PART_2.MARKER_2 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_2 &
color = MAIZE &
name_visibility = off
!
!----------------------------------- PART_3 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_3 &
adams_id = 3 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_3
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_3.MARKER_3 &
adams_id = 3 &
location = 100.0, 173.2050807569, 0.0 &
orientation = 105.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_3.MARKER_4 &
adams_id = 4 &
location = -3.527618041, 559.5754112725, 0.0 &
orientation = 69.1187903196d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_3.cm &
location = 48.2361909795, 366.3902460147, 0.0 &
orientation = 15.0d, 90.0000000266d, 359.9998700542d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_3 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_3.LINK_2 &
i_marker = .model_1.PART_3.MARKER_3 &
j_marker = .model_1.PART_3.MARKER_4 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_3 &
color = CYAN &
name_visibility = off
!
!----------------------------------- PART_4 ---------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_4 &
adams_id = 4 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_4
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_4.MARKER_7 &
adams_id = 5 &
location = 200.0, -150.0, 0.0 &
orientation = 77.2198348731d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_4.MARKER_8 &
adams_id = 6 &
location = 288.4843613603, 240.0903969526, 0.0 &
orientation = 90.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_4.cm &
location = 244.2421806801, 45.0451984763, 0.0 &
orientation = 347.2198348731d, 90.0000000214d, 359.9999036234d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_4 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_4.LINK_3 &
i_marker = .model_1.PART_4.MARKER_7 &
j_marker = .model_1.PART_4.MARKER_8 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_4 &
color = MAGENTA &
name_visibility = off
!
!----------------------------------- PART_5 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_5 &
adams_id = 5 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_5
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_5.MARKER_5 &
adams_id = 7 &
location = 100.0, 173.2050807569, 0.0 &
orientation = 19.5376724105d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_5.MARKER_6 &
adams_id = 8 &
location = 288.4843613603, 240.0903969526, 0.0 &
orientation = 28.186785432d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_5.cm &
location = 194.2421806801, 206.6477388548, 0.0 &
orientation = 109.5376724105d, 89.9999999771d, 2.3413105657E-005d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_5 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_5.LINK_4 &
i_marker = .model_1.PART_5.MARKER_5 &
j_marker = .model_1.PART_5.MARKER_6 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_5 &
color = RED &
name_visibility = off
!
!----------------------------------- PART_6 ---------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_6 &
adams_id = 6 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_6
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_6.MARKER_9 &
adams_id = 9 &
location = 288.4843613603, 240.0903969526, 0.0 &
orientation = 57.1669281191d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_6.MARKER_10 &
adams_id = 10 &
location = 505.3616838251, 576.1919098925, 0.0 &
orientation = 57.0072171843d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_6.cm &
location = 396.9230225927, 408.1411534226, 0.0 &
orientation = 327.1669281191d, 90.0000000166d, 359.9999433622d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_6 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_6.LINK_5 &
i_marker = .model_1.PART_6.MARKER_9 &
j_marker = .model_1.PART_6.MARKER_10 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_6 &
color = GREEN &
name_visibility = off
!
!----------------------------------- PART_7 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_7 &
adams_id = 7 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_7
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_7.MARKER_13 &
adams_id = 11 &
location = 424.0326879008, 450.1538425401, 0.0 &
orientation = 152.4822564739d, 180.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_7.MARKER_14 &
adams_id = 12 &
location = 246.6591289061, 542.5584991844, 0.0 &
orientation = 117.8897326863d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_7.cm &
location = 335.3459084035, 496.3561708623, 0.0 &
orientation = 62.4822564739d, 89.9999999821d, 359.9999772905d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_7 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_7.LINK_6 &
i_marker = .model_1.PART_7.MARKER_13 &
j_marker = .model_1.PART_7.MARKER_14 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_7 &
color = MAIZE &
name_visibility = off
!
!----------------------------------- PART_8 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_8 &
adams_id = 8 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_8
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_8.MARKER_11 &
adams_id = 13 &
location = 200.0, 400.0, 0.0 &
orientation = 71.8768255719d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_8.MARKER_12 &
adams_id = 14 &
location = 246.6591289061, 542.5584991844, 0.0 &
orientation = 63.4349488229d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_8.cm &
location = 223.3295644531, 471.2792495922, 0.0 &
orientation = 341.8768255719d, 90.000000009d, 359.9999937392d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_8 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_8.LINK_7 &
i_marker = .model_1.PART_8.MARKER_11 &
j_marker = .model_1.PART_8.MARKER_12 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_8 &
color = CYAN &
name_visibility = off
!
!----------------------------------- PART_9 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_9 &
adams_id = 9 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_9
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_9.MARKER_15 &
adams_id = 15 &
location = 600.0, 400.0, 0.0 &
orientation = 118.241669207d, 180.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_9.MARKER_16 &
adams_id = 16 &
location = 505.3616838251, 576.1919098925, 0.0 &
orientation = 90.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_9.cm &
location = 552.6808419126, 488.0959549463, 0.0 &
orientation = 28.241669207d, 89.9999999987d, 0.0d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_9 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_9.LINK_8 &
i_marker = .model_1.PART_9.MARKER_15 &
j_marker = .model_1.PART_9.MARKER_16 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_9 &
color = MAGENTA &
name_visibility = off
!
!---------------------------------- PART_10 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_10 &
adams_id = 10 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_10
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_10.MARKER_17 &
adams_id = 17 &
location = 600.0, 400.0, 0.0 &
orientation = 298.241669207d, 180.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_10.MARKER_18 &
adams_id = 18 &
location = 647.3191580874, 311.9040450537, 0.0 &
orientation = 270.0d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_10.cm &
location = 623.6595790437, 355.9520225269, 0.0 &
orientation = 28.241669207d, 90.0000000063d, 1.3943203924E-006d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_10 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_10.LINK_9 &
i_marker = .model_1.PART_10.MARKER_17 &
j_marker = .model_1.PART_10.MARKER_18 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_10 &
color = RED &
name_visibility = off
!
!---------------------------------- PART_11 --------------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
part create rigid_body name_and_position &
part_name = .model_1.PART_11 &
adams_id = 11 &
location = 0.0, 0.0, 0.0 &
orientation = 0.0d, 0.0d, 0.0d
!
defaults coordinate_system &
default_coordinate_system = .model_1.PART_11
!
! ****** Markers for current part ******
!
marker create &
marker_name = .model_1.PART_11.MARKER_19 &
adams_id = 19 &
location = 647.3191580874, 311.9040450537, 0.0 &
orientation = 198.6463458473d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_11.MARKER_20 &
adams_id = 20 &
location = 315.69062388, 200.0, 0.0 &
orientation = 209.3639981373d, 0.0d, 0.0d
!
marker create &
marker_name = .model_1.PART_11.cm &
location = 481.5048909837, 255.9520225269, 0.0 &
orientation = 108.6463458473d, 90.0000000158d, 359.9999252306d
!
part create rigid_body mass_properties &
part_name = .model_1.PART_11 &
material_type = .model_1.steel
!
! ****** Graphics for current part ******
!
geometry create shape link &
link_name = .model_1.PART_11.LINK_10 &
i_marker = .model_1.PART_11.MARKER_19 &
j_marker = .model_1.PART_11.MARKER_20 &
width = 10.0 &
depth = 10.0
!
part attributes &
part_name = .model_1.PART_11 &
color = GREEN &
name_visibility = off
!
!----------------------------------- Forces --------------------------------!
!
!
!---------------------------------- Accgrav --------------------------------!
!
!
force create body gravitational &
gravity_field_name = gravity &
x_component_gravity = 0.0 &
y_component_gravity = -9806.65 &
z_component_gravity = 0.0
!
!----------------------------- Analysis settings ---------------------------!
!
!
!---------------------------- ADAMS/View Variables -------------------------!
!
!
variable create &
variable_name = .model_1.DV_FI &
units = "no_units" &
range = -1.0, 1.0 &
use_allowed_values = no &
delta_type = relative &
real_value = 60.0
!
variable create &
variable_name = .model_1.DV_L_OA &
units = "no_units" &
range = -1.0, 1.0 &
use_allowed_values = no &
delta_type = relative &
real_value = 200.0
!
variable create &
variable_name = .model_1.DV_L_AB &
units = "no_units" &
range = -1.0, 1.0 &
use_allowed_values = no &
delta_type = relative &
real_value = 400.0
!
variable create &
variable_name = .model_1.DV_PSI &
units = "no_units" &
range = -1.0, 1.0 &
use_allowed_values = no &
real_value = 105.0
!
variable create &
variable_name = .model_1.DV_1 &
units = "no_units" &
range = -1.0, 1.0 &
use_allowed_values = no &
delta_type = relative &
real_value = 28.241669207
!
variable create &
variable_name = .model_1.DV_PSI1 &
units = "no_units" &
range = -1.0, 1.0 &
real_value = 198.6463458473
!
!--------------------------- Expression definitions ------------------------!
!
!
defaults coordinate_system &
default_coordinate_system = ground
!
material modify &
material_name = .model_1.steel &
youngs_modulus = (2.07E+011(Newton/meter**2)) &
density = (7801.0(kg/meter**3))
!
marker modify &
marker_name = .model_1.PART_2.MARKER_1 &
orientation = &
(.model_1.DV_FI), &
0.0, &
0.0 &
relative_to = .model_1.PART_2
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_2.MARKER_2 &
location = &
(LOC_RELATIVE_TO({20.0cm, 0.0, 0.0}, .model_1.PART_2.MARKER_1)) &
relative_to = .model_1.PART_2
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_2.LINK_1 &
width = (10mm) &
depth = (10mm)
!
marker modify &
marker_name = .model_1.PART_3.MARKER_3 &
location = &
(LOC_RELATIVE_TO({0, 0, 0}, .model_1.PART_2.MARKER_2)) &
orientation = &
(.model_1.DV_PSI), &
0.0, &
0.0 &
relative_to = .model_1.PART_3
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_3.MARKER_4 &
location = &
(LOC_RELATIVE_TO({40.0cm, 0.0, 0.0}, .model_1.PART_3.MARKER_3)) &
relative_to = .model_1.PART_3
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_3.LINK_2 &
width = (10mm) &
depth = (10mm)
!
marker modify &
marker_name = .model_1.PART_4.MARKER_7 &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_4.MARKER_7, .model_1.PART_5.MARKER_6, "x")) &
relative_to = .model_1.PART_4
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_4.MARKER_8 &
location = &
(LOC_RELATIVE_TO({40.0cm, 0.0, 0.0}, .model_1.PART_4.MARKER_7)) &
relative_to = .model_1.PART_4
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_4.LINK_3 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_5.MARKER_5 &
location = &
(LOC_RELATIVE_TO({0, 0, 0}, .model_1.PART_2.MARKER_2)) &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_5.MARKER_5, .model_1.PART_4.MARKER_8, "x")) &
relative_to = .model_1.PART_5
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_5.MARKER_6 &
location = &
(LOC_RELATIVE_TO({20.0cm, 0.0, 0.0}, .model_1.PART_5.MARKER_5)) &
relative_to = .model_1.PART_5
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_5.LINK_4 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_6.MARKER_9 &
location = &
(LOC_RELATIVE_TO({0, 0, 0}, .model_1.PART_4.MARKER_8)) &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_6.MARKER_9, .model_1.PART_9.MARKER_16, "x")) &
relative_to = .model_1.PART_6
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_6.MARKER_10 &
location = &
(LOC_RELATIVE_TO({40.0cm, 0.0, 0.0}, .model_1.PART_6.MARKER_9)) &
relative_to = .model_1.PART_6
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_6.LINK_5 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_7.MARKER_13 &
location = &
(LOC_ALONG_LINE(.model_1.PART_6.MARKER_9, .model_1.PART_6.MARKER_10, 250)) &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_7.MARKER_13, .model_1.PART_8.MARKER_12, "x")) &
relative_to = .model_1.PART_7
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_7.MARKER_14 &
location = &
(LOC_RELATIVE_TO({20.0cm, 0.0, 0.0}, .model_1.PART_7.MARKER_13)) &
relative_to = .model_1.PART_7
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_7.LINK_6 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_8.MARKER_11 &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_8.MARKER_11, .model_1.PART_7.MARKER_14, "x")) &
relative_to = .model_1.PART_8
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_8.MARKER_12 &
location = &
(LOC_RELATIVE_TO({15.0cm, 0.0, 0.0}, .model_1.PART_8.MARKER_11)) &
relative_to = .model_1.PART_8
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_8.LINK_7 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_9.MARKER_15 &
orientation = &
(ORI_ALONG_AXIS(.model_1.PART_9.MARKER_15, .model_1.PART_6.MARKER_10, "x")) &
relative_to = .model_1.PART_9
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_9.MARKER_16 &
location = &
(LOC_RELATIVE_TO({20.0cm, 0.0, 0.0}, .model_1.PART_9.MARKER_15)) &
relative_to = .model_1.PART_9
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_9.LINK_8 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_10.MARKER_17 &
orientation = &
(ORI_RELATIVE_TO({180, 0, 0}, .model_1.PART_9.MARKER_15)) &
relative_to = .model_1.PART_10
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_10.MARKER_18 &
location = &
(LOC_RELATIVE_TO({10.0cm, 0.0, 0.0}, .model_1.PART_10.MARKER_17)) &
relative_to = .model_1.PART_10
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_10.LINK_9 &
width = (1.0cm) &
depth = (1.0cm)
!
marker modify &
marker_name = .model_1.PART_11.MARKER_19 &
location = &
(LOC_RELATIVE_TO({0, 0, 0}, .model_1.PART_10.MARKER_18)) &
orientation = &
(.model_1.DV_PSI1), &
0.0, &
0.0 &
relative_to = .model_1.PART_11
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
marker modify &
marker_name = .model_1.PART_11.MARKER_20 &
location = &
(LOC_RELATIVE_TO({35.0cm, 0.0, 0.0}, .model_1.PART_11.MARKER_19)) &
relative_to = .model_1.PART_11
!
defaults coordinate_system &
default_coordinate_system = .model_1.ground
!
geometry modify shape link &
link_name = .model_1.PART_11.LINK_10 &
width = (1.0cm) &
depth = (1.0cm)
!
variable modify &
variable_name = .model_1.DV_PSI &
real_value = (90 + ASIN(.model_1.DV_L_OA / .model_1.DV_L_AB) * COS(.model_1.DV_FI))
!
variable modify &
variable_name = .model_1.DV_1 &
real_value = (AZ(.model_1.ground.MARKER_21, .model_1.PART_10.MARKER_17))
!
variable modify &
variable_name = .model_1.DV_PSI1 &
real_value = (ASIN((200 - 100 * COS(.model_1.DV_1)) / 350) + 180)
!
model display &
model_name = model_1