Точечные цели
1. Условия, при которых цели являются точечными.
Цели являются точечными, если имеют место неравенства:
 , ,  , ,
 , ,  , ,
| (3.7) |
где lц – наибольшей размер цели; d(D), d(jаз), d(jум), d(Vр) – разрешающие способности РЛС соответственно по дальности, угловым координатам и скорости; d(j)D = d(l) – линейная разрешающая способность по угловой координате.
Таким образом, точечные цели – это такие цели, которые практически не увеличивают длительности отражённого сигнала и не изменяют его спектр по сравнению с сигналом, отражённым от цели – геометрической точки. Эти неравенства показывают также, что понятие точечной цели не является абсолютным: самолёт, например, будет точечной целью для большинства РЛС на больших расстояниях, несколько сотен метров, указанные неравенства уже не выполняются.
2. Особенности траекторий целей и
их влияние на параметры РЛС.
Траектория – это кривая, описываемая центром массы цели при её движении. Форма траектории может быть закономерной и случайной. Закономерными траекториями обладают баллистические ракеты, искусственные спутники. Закономерная траектория может быть однозначно определена, если измерено необходимое количество её параметров.
Закономерный характер движения цели обусловливает и закономерность изменения параметров принимаемых отражённых сигналов. Это обстоятельство является весьма важным, так как оно допускает длительное накопление энергии принимаемых сигналов. Такое накопление энергии большого количества отражённых сигналов, каждый из которых несёт малую энергию, позволяет при прочих равных условиях обеспечить очень большую дальность обнаружения и высокую точность измерения параметров траектории движущихся целей.
Однако при обнаружении целей, имеющих случайные траектории, нельзя использовать длительное накопление энергии принимаемых сигналов для увеличения дальности обнаружения, так как изменение их параметров не имеет закономерного характера на больших интервалах времени. Эффективное накопление в таких случаях может быть осуществлено лишь за время облучения цели сканирующим лучом антенны.
Случайность траекторий маневрирующих целей требует определение характеристик обзора пространства радиолокационной станцией. Чем быстрее маневрирует цель, тем чаще должно производиться её облучение и измерение координат, для того чтобы можно было точно воспроизвести траекторию её движения. Траектория представляет непрерывную пространственно – временную функцию S(t) (рис.3.2), которая может быть задана совокупностью зависимостей D(t), jаз(t) и jум(t), выражающих полярные координаты цели как функции времени. За интервал наблюдения Тн каждая из этих функций может быть описана конечным числом дискретных отсчётов. Число этих отсчётов может быть определено по теореме Котельникова:
 ,
,
где FВ – наивысшая частота спектра воспроизводимой функции.
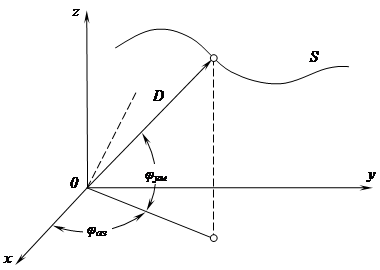
Рис.3.2. Траектория маневрирующей цели.
Следовательно, конкретная траектория цели может быть воспроизведена, если период обзора РЛС будет удовлетворять неравенству
 ,
,
причём FВ – это наиболее высокая частота из определённых по спектрам функций D(t), jаз(t) и jум(t).
Так как различных траекторий может быть бесчисленное множество, а обзор проще осуществлять с постоянной скоростью, то при выборе периода обзора следует ориентироваться на самую неблагоприятную траекторию, для которой спектры функций D(t), jаз(t) и jум(t) наиболее широкие.
3.Особенности движения целей вокруг центра массы и их влияние на характер отражённого сигнала.
Случайные колебания цели относительно центра массы происходят вследствие возмущений в окружающей среде и в системе управления полётом. Баллистические ракеты и искусственные спутники в полёте испытывают случайные колебания и вращения вокруг осей, случайно меняющих своё направление («кувыркаются») с «периодом» от нескольких минут до нескольких десятков минут. Случайные рыскания, продольные и поперечные крены самолётов по результатам многочисленных экспериментальных исследований имеют среднее значение амплитуды колебаний около 1-20 и средний «период» в несколько секунд. Однако для различных типов самолётов эти данные могут значительно расходиться и, кроме того, на них в сильно степени влияет состояние атмосферы. Поэтому приведённые величины следует рассматривать как весьма ориентировочные.
В первом приближении моделью сложной цели, такой, как самолёт, может служить цель, состоящая из двух стабильно отражающих точек 1и 2, расположенных на расстоянии lц, равном размеру самолёта (рис.3.3).

Рис.3.3. Модель цели, состоящая из двух точек.
Оценим характер переизлучения такой цели. Для этого надо сначала определить напряженность поля результирующего сигнала в отдалённой точке В, находящейся на расстоянии D от центра О цели (D³lц). Сигнал, пришедший от точки 1, имеет вид
 . .
| (3.8) |
Сигнал, пришедший от точки 2:
 . .
| (3.9) |
Если бы существовал только один изотропный источник излучения в точке О, то сигнал от него в точке В имел бы вид
 . .
| (3.10) |
Таким образом, сигнал, пришедший от точки 1, отстаёт по фазе на угол
| (3.11) |
от сигнала е0, а сигнал от точки 2 опережает его на такой же угол (рис.3.4).

Рис.3.4. Векторная диаграмма сигналов, отражённых от точек 1 и 2 цели рис. 3.3.
Нетрудно видеть, что амплитуда результирующего сигнала

| (3.12) |
а фазовый сдвиг по отношению к сигналу е0 равен
 . .
| (3.13) |
Таким образом, результирующий сигнал, принятый от точек 1 и 2, имеет вид:
 . .
| (3.14) |
Выражение (3.12) показывает, что при Е1=Е2=Е0 амплитуда результирующего сигнала при измени направления облучения может изменяться от нуля (при  ) до 2Е0 (при
) до 2Е0 (при  ). Ширина «лепестка» диаграммы переизлучения по «нулям» может быть найдена из условия
). Ширина «лепестка» диаграммы переизлучения по «нулям» может быть найдена из условия

| (3.15) |
или
 . .
| (3.16) |
Считая приближённо sinj»j, получим ширину «лепестка» равной
 . .
| (3.17) |
Принимая l=3см, lц=10м, находим
 . .
| (3.18) |
При l=10см  . Таким образом, диаграмма переизлучения рассмотренной цели является весьма «изрезанной», состоящей из множества узких лепестков.
. Таким образом, диаграмма переизлучения рассмотренной цели является весьма «изрезанной», состоящей из множества узких лепестков.
В реальных условиях при случайных движениях цели относительно центра массы и при её манёврах амплитуда отражённого сигнала будет случайной функцией времени с резкими изменениями, доходящими до нескольких десятков децибел.
Закон распределения амплитуд сигналов, отражённых от различных сложных целей (самолёта, корабля, облака искусственных отражателей), по результатам различных экспериментов хорошо совпадает с распределением Релея:
 , ,
| (3.19) |
где s2и – дисперсия амплитуды сигналов.
4. Эффективная отражающая площадь.
Определим эффективную отражающую площадь двухточечной цели (рис.3.3).
Мощность отражённого сигнала на входе приёмника:

| (3.20) |
где SА – эффективная площадь раскрыва антенны РЛС;
rмРЛС – плотность потока мощности.
Таким образом, при k=const мощность отражённого сигнала будет прямо пропорциональна эффективной отражающей площади цели.
Мощность отражённого сигнала, в свою очередь, пропорциональна квадрату напряженности поля. Полагая, что амплитуды напряжённости поля, переизлучаемого точками 1 и 2, одинаковы и равны Е0, будем иметь
 . .
|
Отсюда мощность отражённого сигнала

| (3.21) |
и
 , ,
| (3.22) |
где Sэфф1 – эффективная отражающая площадь каждого излучателя.
Следовательно, при изменении угла y величина Sэфф может колебаться в пределах (0¸4)Sэфф1. Считая все значения y равновероятными в интервале 0¸2p, получим среднее значение эффективной отражающей площади двухточечной цели:
 . .
| (3.23) |
Перейдём теперь к определению закона распределения эффективной отражающей площади сложной цели.
Мощность и амплитуда отражённого сигнала на входе приёмника связаны соотношением
 , ,
|
где Rвх – входное сопротивление приёмника.
Принимая для простоты Rвх=1, получим
 . .
|
Считая, что распределение амплитуды отражённого сигнала подчиняется закону распределения Релея (3.19), найдем закон распределения мощности, а, следовательно, и эффективной отражающей площади. Используем для этого формулу функционального преобразования законов распределения:
 . .
| (3.24) |
Учитывая, что  и дисперсия амплитуды есть средняя мощность флюктуирующего отражённого сигнала
и дисперсия амплитуды есть средняя мощность флюктуирующего отражённого сигнала  , получим
, получим
 . .
| (3.25) |
Учитывая также, что
 , ,
| (3.26) |
и подставляя (3.25) и (3.26) в (3.24), будем иметь
 . .
| (3.27) |
Переходя от мощности к пропорциональной ей величине отражающей эффективной отражающей поверхности, получим окончательное выражение для плотности распределения
 . .
| (3.28) |
Обычно интересуются вероятностью того, что случайное значение будет не меньше выбранной расчётной величины Sэфф р. Интегрируя (3.28) в пределах от Sэфф р до ¥, получим
 . .
| (3.29) |
Отметим, что среднему значению эффективной отражающей площади соответствует вероятность W(Sэфф ³ Sэфф0)=0,37. Именно это значение Sэфф0 и используется в расчётах дальности действия РЛС.
5. Спектр флюктуаций амплитуды.
Ширина спектра амплитудных флюктуаций цели в основном определяется степенью изрезанности диаграммы переизлучения и скоростью изменения ракурса облучения. Чем уже лепестки диаграммы и чем больше указанная скорость, тем выше частота флюктуаций. Ширина лепестков q0 достигает в сантиметровом диапазоне (0,1 – 0,05)0 . Скорость изменения ракурса при маневрах самолётов может иметь величину w = 10¸20 град/сек. Таким образом, при грубой оценке антенна РЛС за одну секунду примет  «периодов» колебаний сигнала, что и определяет наивысшую частоту спектра флюктуаций Fфл1 =100¸400 Гц.
«периодов» колебаний сигнала, что и определяет наивысшую частоту спектра флюктуаций Fфл1 =100¸400 Гц.
При рысканиях и случайных кренах самолёта скорость изменения ракурса составляет 1-2 град/сек, и частота флюктуаций, соответствующая этим движениям цели, лежит в пределах
 Гц. Гц.
| (3.30) |
Эта оценка хорошо согласуется с экспериментальными данными. На рис.3.5, а показан типичный спектр амплитудных флюктуаций сигнала, отражённого от неманеврирующего самолёта, на рис.3.5,б– соответствующая этому спектру корреляционная функция. Видно, что флюктуации наиболее интенсивны в области частот 0-10 Гц, а время корреляции составляет 0,05 сек.
Следует заметить, что при малых дальностях в сантиметровом диапазоне волн флюктуации могут создаваться также вследствие биений сигналов, отражённых от различных точек цели, имеющих по отношению к РЛС различные радиальные скорости, а, следовательно, отражающих сигналы с различными доплеровскими смещениями частоты.

а) б)
Рис.3.5.Спектр флюктуаций амплитуды и корреляционная функция сигнала, отражённого от самолёта.
Флюктуации амплитуды отражённого сигнала являются одним из основных источников ошибок в РЛС с автоматическим измерением угловых координат путём последовательно сравнения амплитуд (конический обзор). В такой системе автосопровождения для выделения сигнала ошибки используется узкополосный фильтр с резонансной частотой равной частоте сканирования. Поэтому частоту сканирования выбирают в области меньших интенсивностей флюктуаций – от 40 Гц и выше. Радикальным методом борьбы с ошибками, вызываемыми флюктуациями амплитуды сигнала, является применение моноимпульсных пеленгаторов, в которых осуществляется одновременное сравнение амплитуд, исключающее указанные ошибки. Характер изменения интенсивности амплитудных флюктуаций по частоте учитывается также при выборе постоянной времени АРУ в системах автосопровождения цели.
6. Флюктуации фазового фронта отражённого сигнала.
Было замечено, что с уменьшением расстояния до сложной цели ошибки сопровождения по угловым координатам растут. Причиной этого являются флюктуации фазового фронта отражённого сигнала. Для точечного изотропного излучателя фазовой фронт представляет сферу. Поэтому пеленгация точечного изотропного излучателя при прочих идеальных условиях всегда будет осуществляться без ошибки. При пеленгации сложной цели пеленгатор при тех же условиях будет в каждый момент указывать положение нормали к фазовому фронту, не проходящей в общем случае через центр цели. При случайных перемещениях цели относительно РЛС положение нормали будет также случайным образом меняться и цель в этих условиях может быть заменена точкой, блуждающей в некотором объёме, размеры которого могут превосходить размеры цели. Эту блуждающую точку называют эффективным центром отражения цели. Таким образом, пеленгатор в некоторых случаях может указывать направление, выходящее за пределы контура цели.
Обратимся снова к простейшей модели реальной цели в виде двух изотропных переизлучателей с базой lц (рис.3.3) и найдём для неё уравнение эквифазной поверхности и ошибку пеленгации. Уравнение эквифазной поверхности можно получить, если поставить условие, чтобы фаза для фиксированного момента времени оставалась постоянной:
 . .
| (3.31) |
Из этого уравнения могут быть найдены пары значений j и D, определяющие каждую точку эквифазной поверхности в зависимости от соотношения амплитуд сигналов.
Выражение для ошибки пеленга при фиксированном значение угла j (рис.3.3) может быть найдено следующим образом. Производная dD/dj в какой-либо точке (j, D) поверхности определяет искривление фазового фронта двухточечной цели по сравнению со сферой, проходящей через эту же точку.
Угол Dj между нормалью к поверхности в точке (j, D) и радиус-вектором D, проходящим через эту же точку, и является ошибкой пеленгации. Тангенс этого угла, как это видно из рис.3.3, равен
 . .
| (3.32) |
Выражение (3.32) показывает, что ошибка пеленгации Dj уменьшается с увеличением расстояния до цели. Это ясно и из физических соображений; если приближённо принять наибольшую амплитуду блужданий эффективного центра отражения равной размеру цели lц, то угловая ошибка при этом будет обратно пропорциональна дальности цели
 . .
| (3.33) |
При движении реальной цели угол j случайным образом меняется и ошибка флюктуирует. Это проявляется в виде случайных изменений сигнала ошибки измерения угла цели на выходе приёмника, что дало основание назвать флюктуации фазового фронта угловыми шумами цели.
7.Флюктуации времени запаздывания отражённого сигнала (флюктуации дальности)
Блуждание эффективного центра отражения происходит в пределах некоторого объёма, заключающего реальную цель.
Поэтому кроме флюктуаций по угловым координатам возникают также флюктуации времени прихода сигнала. Соответствующие им отклонения по дальности обычно не превышают геометрических размеров цели в направлении облучения. Спектр этих флюктуаций и плотность распределения их амплитуд весьма близко совпадают с соответствующими характеристиками угловых шумов. Величина среднеквадратического отклонения от среднего значения дальности составляет около 0,8 размера цели.
3.4 Свойства сигналов, отражённых от распределённых целей
1.Общие сведения
Как уже отмечалось, распределённые цели представляют собой сочетание большого количества отражающих объектов, расположенных или на поверхности земли или в некотором объёме пространства. Отражения от таких целей чаще всего относятся к мешающим сигналам, которые затрудняют распознавание полезных радиолокационных целей. Однако отражения от распределённых целей иногда являются и полезными, например, в случае, когда ведётся наблюдение земной поверхности с воздуха. Положение отражающих объектов на поверхности характеризует или особенности растительного покрова или вид рельефа.
Оценим эффективную отражающую площадь распределённой цели. Сигналы, приходящие от распределённой цели, создаются за счёт отражений от всех элементов цели, которые попадают в разрешаемый объём. Разрешаемый объём зависит от вида сигнала, характеристики направленности антенны и является в общем случае также и функцией расстояния до цели. Если принять, что в разрешаемом объёме находится N равномерно расположенных элементарных отражателей, то результирующий сигнал можно представить в виде суммы сигналов, отражённых от этих элементарных отражателей. Почти во всех случаях отражённые сигналы можно считать не зависящими друг от друга, они имеют случайные фазы и амплитуды. Мощность суммарного сигнала равна сумме мощностей сигналов, отражённых от отдельных рассеивателей, входящих в разрешаемый объём РЛС
 . .
| (3.34) |
Мощность сигнала, отражённого от отдельного элементарного отражателя, пропорциональна, как известно, эффективной отражающей площади Sэффi этого отражателя:
 . .
| (3.35) |
Из соотношений (3.34) и (3.35) следует, что
 . .
| (3.36) |
Сигнал, отражённый от распределённой цели, также можно представить в виде:
 . .
| (3.37) |
Используя формулы (3.36) и (3.37), получаем, что эффективная площадь распределённой цели равна сумме эффективных площадей отдельных отражателей:
 . .
| (3.38) |
Если разрешаемый объём РЛС не слишком мал, то для характеристики отражающих свойств распределённой цели вводят удельную эффективную площадь отражения Sэфф у. Удельная эффективная площадь не зависит ни от вида сигнала (от длительности импульса в импульсной РЛС), ни от ширины луча антенны. Полную эффективную площадь поверхностной цели в этом случае можно найти путём умножения удельной эффективной площади на геометрическую площадь Sп участка поверхностной цели, попавшей в разрешаемый объём:
 . .
| (3.39) |
Аналогично для объёмной цели Sэфф об эффективная площадь отражения равна произведению
 , ,
| (3.40) |
где Vоб – геометрический объём цели, который равен разрешаемому объёму РЛС.
2.Флюктуации сигналов, отражённых от сложных целей
Отражённые сигналы от распределённых целей непрерывно, случайным образом изменяются во времени, флюктуируют.
Флюктуации сигналов зависят от целого ряда причин. Существенную роль, в частности, играют собственные хаотические перемещения отдельных отражателей, входящих в состав цели. К таким перемещениям относятся, например, колебания ветвей деревьев или травы при ветре, падение капель дождя, движение волн на морской поверхности.
Флюктуации возникают также при изменении частоты облучения и количества отражателей, попадающих в разрешаемый объём при движении РЛС или при вращении антенны РЛС во время обзора пространства.
Случайные колебания амплитуды результирующего сигнала характеризуются некоторыми распределениями плотностей вероятности. Известно, что одномерное распределение плотности вероятностей амплитуд, как и для случая сложной цели, подчинено закону Релея. Однако одномерные распределения вероятностей не позволяют судить о характере флюктуаций сигналов во времени, не дают представления о спектре частот отражённого сигнала. В большинстве случаев для этого достаточно знать двумерный закон распределения плотности вероятностей амплитуд. С высокой степенью точности можно считать, что двумерное распределение плотностей вероятностей сигнала, отражённого от распределённой цели, является нормальным.
Совместное распределение амплитуд и фаз сигналов имеет вид:
 , ,
|
(3.41)
где Uм1, Uм2 – амплитуды результирующего сигнала, отражённого от распределённой цели, соответственно в моменты времени t1 и t2;
y1 и y2 – фазы сигналов также в моменты времени t1 и t2;
Рср – средняя мощность отражённого сигнала;
К0(t) – нормированная корреляционная функция флюктуаций отражённого сигнала;
t– разность времени: t= t1 - t2.
В общем случае, когда имеется много независимых причин, вызывающих флюктуации Кi(t), корреляционная функция может быть представлена в виде произведения частных корреляционных функций, каждая из которых учитывает какаю-то одну причину:
 , ,
| (3.42) |
где М – общее количество различных факторов, вызывающих флюктуации отражённого сигнала.
Такое представление корреляционной функции (3.42) удобно тем, что позволяет находить вид корреляционной функции экспериментальных или теоретических исследований каждого из факторов отдельно.
Флюктуации отраженного сигнала можно характеризовать спектром мощности сигнала. Как известно, спектр мощности можно найти, применяя преобразование Фурье корреляционной функции (соотношение Хинчина-Винера). Из свойств преобразования Фурье следует, что чем шире корреляционная функция, тем уже спектр мощности флюктуаций. Ширина спектра увеличивается, например, при увеличении скорости ветра, при уменьшении длины волны. Ширина спектра мощности флюктуации обычно находиться в пределах от десятка до нескольких сотен герц.
Если обозначить tк – время корреляции, соответствующее значению корреляционной функции К0(t) на уровне 1/е, то можно найти ширину спектра мощности флюктуации Dfфл также на уровне 1/е по формуле
 . .
| (3.43) |
При гауссовской форме корреляционной функции соотношение для времени корреляции имеет вид
  , ,
| (3.44) |
а формула для ширины спектра мощности флюктуаций имеет вид
 . .
| (3.45) |
При приёме сигналов в самолётных условиях нужно учитывать большое количество факторов, влияющих на характер флюктуаций. Часто само движение самолёта является причиной значительного расширения спектра флюктуаций до нескольких сотен герц и больше.