рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Компьютеры
- /
- Эвристический (упорядоченный) поиск
Реферат Курсовая Конспект
Эвристический (упорядоченный) поиск
Эвристический (упорядоченный) поиск - раздел Компьютеры, Искусственный интеллект Идея, Лежащая В Основе Большинства Эвристических Алгоритмов, Состоит В Том, Ч...
Идея, лежащая в основе большинства эвристических алгоритмов, состоит в том, чтобы оценивать (с помощью численных оценок) перспективность нераскрытых вершин пространства состояний (с точки зрения достижения цели), и выбирать для продолжения поиска наиболее перспективную вершину. Самый обычный способ использования эвристической информации – введение так называемой эвристической оценочной функции. Эта функция определяется на множестве вершин пространства состояний и принимает числовые значения. Значение оценочной функции Est(V) может интерпретироваться как перспективность раскрытия вершины, или вероятность ее расположения на решающем пути. Обычно считают, что меньшее значение Est(V) соответствует более перспективной вершине, и вершины раскрываются в порядке увеличения (возрастания) значения оценочной функции.
Таким образом, основные шаги алгоритма эвристического перебора таковы:
Шаг 1. Поместить начальную вершину в список Open и вычислить ее оценку (значение оценочной функции).
Шаг 2. Если список Open пуст, то окончание алгоритма и выдача сообщения о неудаче поиска, в противном случае перейти к шагу 3.
Шаг 3. Выбрать из списка Open вершину с минимальной оценкой (среди вершин с одинаковой минимальной оценкой выбирается любая); перенести эту вершину (назовем ее Current) в список Closed.
Шаг 4. Если Current – целевая вершина, то окончание алгоритма и выдача решения задачи, получающегося просмотром указателей от нее к начальной вершине, в противном случае перейти к следующему шагу.
Шаг 5. Раскрыть вершину Current, построив все ее дочерние вершины. Если таких вершин нет, то перейти к шагу 2, в ином случае – к шагу 6.
Шаг 6. Для каждой дочерней вершины вычислить оценку (значение оценочной функции), поместить все дочерние вершины в список Open, и построить указатели, ведущие от этих вершин к родительской вершине Current. Перейти к шагу 2.
Заметим, что поиск в глубину можно рассматривать как частный случай упорядоченного поиска с оценочной функцией Est(V) = D(V) , а поиск в ширину -- с Est(V) = 1/D(V) , где D – глубина вершины V.
Рассмотрим работу алгоритма эвристического поиска опять же на примере игры в восемь. В качестве оценочной функции можно взять следующую:
Est(V) = D(V) + K(V) где
D(V) – глубина вершины V, или число ребер дерева на пути от этой вершины к начальной вершине;
K(V) – число фишек позиции-вершины V, лежащих не на «своем» месте.
На рис.15 показано дерево, построенное алгоритмом упорядоченного перебора с указанной оценочной функцией (начальное состояние то же, что и в примерах рис. 13 и 14, а целевое показано на рис.3). Оценка каждой вершины приведена рядом с ней внутри кружка. Отдельно стоящие цифры, как и раньше, показывают порядок, в котором раскрывались вершины. Видно, что так как минимизация оценочной функции производится для всего пространства состояний, то раскрываемые друг за другом вершины могут располагаться в совершенно разных частях пространства состояний.
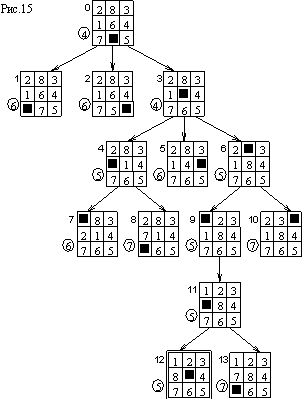
Найденный путь решения задачи длиною в пять ходов может быть получен и другими методами перебора, но использование оценочной функции приводит к существенно меньшему числу раскрытий вершин. Действительно, сравнение трех алгоритмов перебора показывает, что
В общем случае (в среднем) алгоритм эвристического поиска обнаруживает решение быстрее алгоритмов слепого перебора. Важно однако, что использование эвристической функции не может гарантировать сокращение поиска во всех случаях, и иногда (хотя и редко) решение задачи может искаться дольше, чем с использованием слепого метода.
Ясно, что подбор «хорошей» эвристической функции (существенно сокращающей поиск) – наиболее трудный момент при формализации задачи, особенно это важно в больших пространствах состояний. Можно сравнивать различные оценочные функции для одной задачи по их эвристической силе, т.е. по тому, насколько они сокращают (убыстряют) поиск.
Метод ветвей и границ. Из формирующихся в процессе поиска неоконченных путей выбирается самый короткий и продлевается на один шаг. Полученные новые неоконченные пути (их столько, сколько ветвей в данной вершине) рассматриваются наряду со старыми, и вновь продлевается на один шаг кратчайший из них. Процесс повторяется до первого достижения целевой вершины, решение запоминается. Затем из оставшихся неоконченных путей исключаются более длинные, чем законченный путь, или равные ему, а оставшиеся продлеваются по такому же алгоритму до тех пор, пока их длина меньше законченного пути. В итоге либо все неоконченные пути исключаются, либо среди них формируется законченный путь, более короткий, чем ранее полученный. Последний путь начинает играть роль эталона и т. д.
Алгоритмы поиска пути на графе различаются также направлением поиска. Существуют прямые, обратные и двунаправленные методы поиска. Прямой поиск идет от исходного состояния и, как правило, используется тогда, когда целевое состояние задано неявно. Обратный поиск идет от целевого состояния и используется тогда, когда исходное состояние задано неявно, а целевое явно. Двунаправленный поиск требует удовлетворительного решения двух проблем: смены направления поиска и оптимизации "точки встречи". Одним из критериев для решения первой проблемы является сравнение "ширины" поиска в обоих направлениях-выбирается то направление, которое сужает поиск. Вторая проблема вызвана тем, что прямой и обратный пути могут разойтись и чем уже поиск, тем это более вероятно.
2. Планирование по задачам. Этот метод приводит к хорошим результатам потому, что часто решение задач имеет иерархическую структуру. Однако не обязательно требовать, чтобы основная задача и все ее подзадачи решались одинаковыми методами. Редукция полезна для представления глобальных аспектов задачи, а при решении более специфичных задач предпочтителен метод планирования по состояниям. Метод планирования по состояниям можно рассматривать как частный случай метода планирования с помощью редукций, ибо каждое применение оператора в пространстве состояний означает сведение исходной задачи к двум более простым, из которых одна является элементарной. В общем случае редукция исходной задачи не сводится к формированию таких двух подзадач, из которых хотя бы одна была элементарной.
Поиск планирования в пространстве задач заключается в последовательном сведении исходной задачи к все более простым до тех пор, пока не будут получены только элементарные задачи. Частично упорядоченная совокупность таких задач составит решение исходной задачи. Расчленение задачи на альтернативные множества подзадач удобно представлять в виде И/ИЛИ-графа. В таком графе всякая вершина, кроме концевой, имеет либо конъюнктивно связанные дочерние вершины (И-вершина), либо дизъюнктивно связанные (ИЛИ-вершина). В частном случае, при отсутствии И-вершин, имеет место граф пространства состояний. Концевые вершины являются либо заключительными (им соответствуют элементарные задачи), либо тупиковыми. Начальная вершина (корень И/ИЛИ-графа) представляет исходную задачу. Цель поиска на И/ИЛИ-графе - показать, что начальная вершина разрешима. Разрешимыми являются заключительные вершины (И-вершины), у которых разрешимы все дочерние вершины, и ИЛИ-вершины, у которых разрешима хотя бы одна дочерняя вершина. Разрешающий граф состоит из разрешимых вершин и указывает способ разрешимости начальной вершины. Наличие тупиковых вершин приводит к неразрешимым вершинам. Неразрешимыми являются тупиковые вершины, И-вершины, у которых неразрешима хотя бы одна дочерняя вершина, и ИЛИ-вершины, у которых неразрешима каждая дочерняя вершина.
Алгоритм Ченга и Слейгла. Основан на преобразовании произвольного И/ИЛИ-графа в специальный ИЛИ-граф, каждая ИЛИ-ветвь которого имеет И-вершины только в конце. Преобразование использует представление произвольного И/ИЛИ-графа как произвольной формулы логики высказываний с дальнейшим преобразованием этой произвольной формулы в дизъюнктивную нормальную форму. Подобное преобразование позволяет далее использовать алгоритм Харта, Нильсона и Рафаэля.
Метод ключевых операторов. Пусть задана задача <А, В> и известно, что оператор f обязательно должен входить в решение этой задачи. Такой оператор называется ключевым. Пусть для применения f необходимо состояние С, а результат его применения есть f(с). Тогда И-вершина <A,В> порождает три дочерние вершины: <A, С>, <С, f(c}> и <f(с), В>, из которых средняя является элементарной задачей. К задачам <A, С> и <f(с), В> также подбираются ключевые операторы, и указанная процедура редуцирования повторяется до тех пор, пока это возможно. В итоге исходная задача <A, В> разбивается на упорядоченную совокупность подзадач, каждая из которых решается методом планирования в пространстве состояний.
Возможны альтернативы по выбору ключевых операторов, так что в общем случае будет иметь место И/ИЛИ-граф. В большинстве задач удается не выделить ключевой оператор, а только указать множество, его содержащее. В этом случае для задачи <А, В> вычисляется различие между A и В, которому ставится в соответствие оператор, устраняющий это различие. Последний и является ключевым.
Метод планирования общего решателя задач (ОРЗ). ОРЗ явился первой наиболее известной моделью планировщика. Он использовался для решения задач интегрального исчисления, логического вывода, грамматического разбора и др. ОРЗ объединяет два основных принципа поиска:
анализ целей и средств и рекурсивное решение задач. В каждом цикле поиска ОРЗ решает в жесткой последовательности три типа стандартных задач: преобразовать объект A в объект В, уменьшить различие D между A и В, применить оператор f к объекту A. Решение первой задачи определяет различие D второй - подходящий оператор f, третьей - требуемое условие применения С. Если С не отличается от A, то оператор f применяется, иначе С представляется как очередная цель и цикл повторяется, начиная с задачи "преобразовать A в С". В целом стратегия ОРЗ осуществляет обратный поиск - от заданной цели В к требуемому средству ее достижения С, используя редукцию исходной задачи <A, В> к задачам <A, С> и <С, В>.
Заметим, что в ОРЗ молчаливо предполагается независимость различий друг от друга, откуда следует гарантия, что уменьшение одних различий не приведет к увеличению других.
3. Планирование с помощью логического вывода. Такое планирование предполагает: описание состояний в виде правильно построенных формул (ППФ) некоторого логического исчисления, описание операторов в виде либо ППФ, либо правил перевода одних ППФ в другие. Представление операторов в виде ППФ позволяет создавать дедуктивные методы планирования, представление операторов в виде правил перевода - методы планирования с элементами дедуктивного вывода.
– Конец работы –
Эта тема принадлежит разделу:
Искусственный интеллект
На сайте allrefs.net читайте: "Цель преподавания дисциплины искусственный интеллект"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Эвристический (упорядоченный) поиск
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.043 сек.
Новости и инфо для студентов