Понятия системы, основные характеристики системы.
Система – это совокупность элементов, находящихся во взаимодействии и связаны определенной структурой.
Базовый блок любой системы – составляющие ее элементы, каждый элемент характеризуется набором состояний, в которой он может находиться.
Схема функционирования элемента системы:
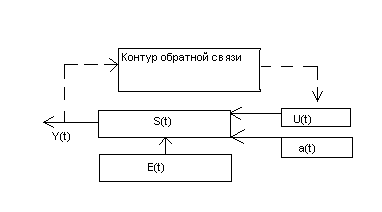
Для многих систем характерен принцип обратной связи – выходной сигнал может использоваться для коррекции управления.
S(t) – состояние элемента в момент t.
U(t) – управление элементом в момент t.
a(t) – внешняя среда элемента в момент t.
E(t) – случайные воздействия элемента в момент t.
Y(t) – выходной сигнал элемента в момент t.
В общем случае описание функционирования элемента системы производится при помощи системы дифференциальных или разностных уравнений следующего вида:
Y(t) =f(S(t), S(t-1), …,U(t),U(t-1),…,a(t),a(t-1),…,E(t),E(t-1),…)
(Y(t) = g ( S(t), a(t), E(t)) (1)
Примеры структуры системы:
1. линейная (последовательная):

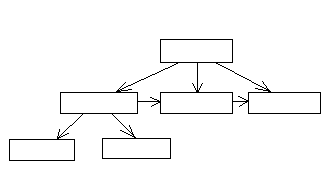
2. иерархическая (древовидная):
3. радиальная ( звездообразная ):

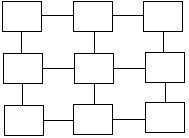
4. сотовая или матричная:
5. многосвязная – с произвольной структурой.
При анализе динамических систем рассмотрим решение следующих задач:
1. Задача наблюдения – состоит в определении состояния системы в момент времени S(t) по данным выходных величин (о их поведении) в будущем.
Найти S(t) , зная,  для системы с дискретным временем.
для системы с дискретным временем.
 для систем с непрерывным временем.
для систем с непрерывным временем.
2. Задача идентификации – в определении текущего состояния S(t) по данным о поведении выходных величин в прошлом.
3. Задачи прогнозирования – определение будущих состояний по данным ткущих и
прошлых значений.
Найти S (t+1), S (t+2),… зная 
4. Задача поиска управления – найти управляющую последовательность U(t), U(t+1),…, U(S), S > t, которая приводит систему из состояния S(t) = X в состояние S(S) = Y.
5. Задача синтеза максимального управления – состоит в определенной оптимальной последовательности управляющих воздействий U*(t) решающий задачу 4 и максимальную целевую функцию или функциональную:
F(S(t)), t = 0,1,2,…
Типы систем:
1.По наличию случайных факторов:
- детерминированные
- стохастические – влиянием случайных факторов нельзя принебреч.
2.По учету фактора времени:
- системы с непрерывным временем
- системы с дискретным временем
3. По влиянию прошлых периодов:
- Марковские системы – для решения 1 и 2 задач нужна информация только за непосредственно предшествующий или последующий период. Для Марковской систем уравнение (1) принимает вид: G(S(t), S(t-1), U(t), U(t-1), a(t), a(t-1), E(t), E(t-1)) = 0
- немарковские.
Некоторые общие свойства систем:
1.причинность – возможность предсказывать последствия некоторых последствий в будущем. Част. случай: предопределенность системы означает, что в сущности такие состояния, для которых вся будущая эволюция системы может быть вычислена на базе прошлых наблюдений.
2.управляемость – состоит в том, что подходящим выбором входного воздействия U можно добиться любого входного сигнала Y.
3.устойчивость – система является устойчивой, если при достаточно малых изменениях условий ее функционирования поведение системы существенно не изменится.
4.инерционность – возникновение запаздываний в системе при реакции (запаздывания) на изменение управления и (или) внешней среды.
5.адаптивность – способность системы изменять поведения и (или) свою структуру в ответ на изменение внешней среды.