Общее планирование реального времени
Используется модель, когда каждый процесс борется за процессор со своим заданием и графиком его выполнения.
Планировщик должен знать:
- частоту, с которой должен работать каждый процесс
- объем работ, который ему предстоит выполнить
- ближайший срок выполнения очередной порции задания
Рассмотрим пример из трех процессов.
Процесс Азапускается каждые 30мс, обработка кадра 10мс
Процесс Вчастота 25 кадров, т.е. каждые 40мс, обработка кадра 15мс
Процесс Счастота 20 кадров, т.е. каждые 50мс, обработка кадра 5мс
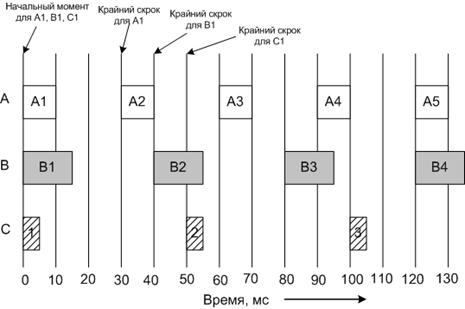
Три периодических процесса
Проверяем, можно ли планировать эти процессы.
10/30+15/40+5/50=0.808<1
Условие выполняется, планировать можно.
Будем планировать эти процессы статическим(приоритет заранее назначается каждому процессу) и динамическимметодами.
6.4.3 Статический алгоритм планирования RMS (Rate Monotonic Scheduling)
Процессы должны удовлетворять условиям:
- Процесс должен быть завершен за время его периода
- Один процесс не должен зависеть от другого
- Каждому процессу требуется одинаковое процессорное время на каждом интервале
- У непериодических процессов нет жестких сроков
- Прерывание процесса происходит мгновенно
Приоритет в этом алгоритме пропорционален частоте.
Процессу А он равен 33 (частота кадров)
Процессу В он равен 25
Процессу С он равен 20
Процессы выполняются по приоритету.
Статический алгоритм планирования RMS (Rate Monotonic Scheduling)
6.4.4 Динамический алгоритм планирования EDF (Earliest Deadline First)
Наибольший приоритет выставляется процессу, у которого осталось наименьшее время выполнения.
При больших загрузках системы EDFимеет преимущества.
Рассмотрим пример, когда процессу А требуется для обработки кадра - 15мс.
Проверяем, можно ли планировать эти процессы.
15/30+15/40+5/50=0.975<1
Загрузка системы 97.5%
Динамический алгоритм планирования EDF (Earliest Deadline First)
Алгоритм планированияRMSтерпит неудачу.