рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Информатика
- /
- Введення байтів стану двох незалежних датчиків
Реферат Курсовая Конспект
Введення байтів стану двох незалежних датчиків
Введення байтів стану двох незалежних датчиків - раздел Информатика, ВВЕДЕННЯ ІНФОРМАЦІЇ З ДАТЧИКІВ Будемо Сподіватись Що, Наприклад, Необхідно Ввести Водноча...
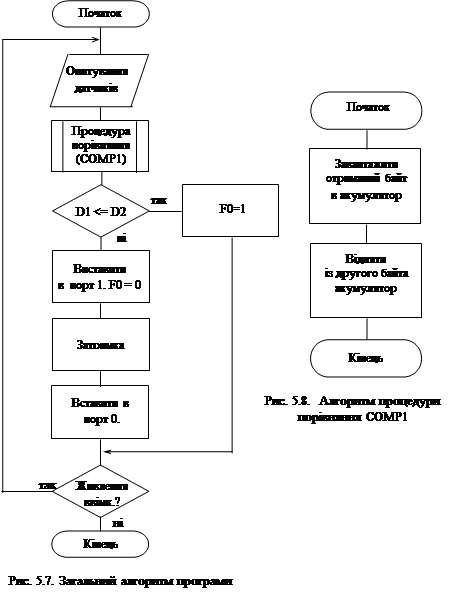
Будемо сподіватись що, наприклад, необхідно ввести водночас через порти введення/ виведення байти стану 2-х незалежних датчиків дискретних сигналів, виконати порівняння введених байтів між собою, і за результатами порівняння здійснити:
1) У випадку, якщо D1 <= D2 управління передається фрагменту програми з адресою А1 і встановлюється в ²1² ознака (прапорець) F0;
2) У випадку, якщо D1 > D2 ознака F0 встановлюється в ²0², у відповідності з варіантом завдання формуються керуючі сигнали, а управління передається на фрагмент програми з адресою А2.
· Вибрати мікроконтролер, що має не менше 17-ти ліній введення/ виведення дискретних сигналів (наприклад, PIC 16C55);
· Вибрати лінії (розряди) портів А, В і С для введення сигналів від датчиків і виведення імпульсних сигналів (наприклад, RB0... RB7 – для вводу сигналів від датчика D1, RC0... RC7 – для вводу сигналів від датчика D2 і RA0 – для виводу імпульсних сигналів управління заданої тривалості);
3) Здійснити опитування стану обох датчиків;
4) Порівняти отримані байти стану між собою;
5) Організувати процедуру передачі управління на дві підпрограми в залежності від результатів порівняння;
6) Сформувати сигнал заданої тривалості за допомогою часового інтервалу, рівного часу затримки.
Для цього можна використати:
· одну або декілька холостих команд NOP;
· програмний лічильник, працюючий, наприклад, в декрементному режимі. При цьому в лічильник заноситься константа, лічильник декрементується. Онулення лічильника є сигналом закінчення часового інтервалу;
· внутрішній таймер-лічильник (TMRO);
· зовнішній (додатковий) таймер-лічильник у випадку, якщо TMRO з будь-якої причини використати неможливо;
7) Організувати введення наступного байта.
На підставі попередніх міркувань можна запропонувати варіант блок-схеми алгоритму робочої програми мікроконтролера. Цей алгоритм наведений на рис. 5.7. На рис. 5.8 наведена БСА підпрограми порівняння двох байтів стану незалежних датчиків D1 і D2 між собою (СОМР1).
На підставі блок-схем алгоритмів і розподілу пам'яті даних можна запропонувати текст програми, що наведений нижче:
; Текст програми:
LIST p = 16C55, r = HEX
Title ‘Z3’
– Конец работы –
Эта тема принадлежит разделу:
ВВЕДЕННЯ ІНФОРМАЦІЇ З ДАТЧИКІВ
ВВЕДЕННЯ ІНФОРМАЦІЇ З ДАТЧИКІВ ФОРМУВАННЯ СИГНАЛІВ УПРАВЛІННЯ В технічних системах... Введення інформації від двійкового датчика і... Секція заголовка...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Введення байтів стану двох незалежних датчиків
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.016 сек.
Новости и инфо для студентов