Графический метод решения ЗЛП
Если система ограничений задачи линейного программирования представлена в виде системы линейных неравенств с двумя переменными, то такая задача может быть решена геометрически. Таким образом, данный метод решения ЗЛП имеет очень узкие рамки применения.
Однако метод представляет большой интерес с точки зрения выработки наглядных представлений о сущности задач линейного программирования.
Геометрический (или графический) метод предполагает последовательное выполнение ряда шагов. Ниже представлен порядок решения задачи линейного программирования на основе ее геометрической интерпретации.
1. Сформулировать ЗЛП.
2. Построить на плоскости {х1, х2} прямые, уравнения которых получаются в результате замены в ограничениях знаков неравенств на знаки точных равенств.
3. Найти полуплоскости, определяемые каждым из ограничений задачи.
4. Найти область допустимых решений.
5. Построить прямую c1x1 + c2x2 = h, где h - любое положительное число, желательно такое, чтобы проведенная прямая проходила через многоугольник решений.
6. Перемещать найденную прямую параллельно самой себе в направлении увеличения (при поиске максимума) или уменьшения (при поиске минимума) целевой функции. В результате, либо отыщется точка, в которой целевая функция принимает максимальное (минимальное) значение, либо будет установлена неограниченность функции на множестве решений.
7. Определить координаты точки максимума (минимума) функции и вычислить значение функции в этой точке.
Z= 2x1 + 4x2 → max;
x1 ≥ 0, x2 ≥ 0.
2. Теперь построим прямые, соответствующие каждому из функциональных ограничений задачи (см. рисунок 2.1). Эти прямые обозначены на рисунке (1), (2) и (3).
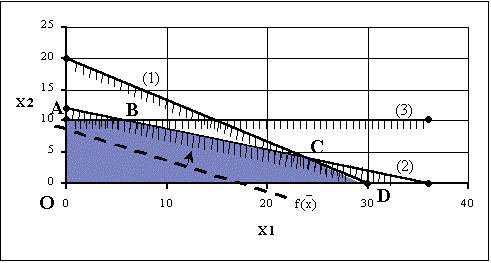
3. Штрихи на прямых указывают полуплоскости, определяемые ограничениями задачи.
4. Область допустимых решений включает в себя точки, для которых выполняются все ограничения задачи. В нашем случае область представляет собой пятиугольник (на рисунке обозначен ABCDO и окрашен синим цветом).
5. Прямая, соответствующая целевой функции, на рисунке представлена пунктирной линией.
6. Прямую передвигаем параллельно самой себе вверх (направление указано стрелкой), поскольку именно при движении в этом направлении значение целевой функции увеличивается. Последней точкой многоугольника решений, с которой соприкоснется передвигаемая прямая, прежде чем покинет его, является точка C. Это и есть точка, соответствующая оптимальному решению задачи.
7. Осталось вычислить координаты точки С. Она является точкой пересечения прямых (1) и (2). Решив совместно уравнения этих прямых, найдем:  ,
,  . =4 .Подставляя найденные величины в целевую функцию, найдем ее значение в оптимальной точке f(
. =4 .Подставляя найденные величины в целевую функцию, найдем ее значение в оптимальной точке f( )=64 .
)=64 .
56. Свойства решений ЗЛП (4 теоремы):
— Теорема о выпуклости множества планов ЗЛП (Теорема №1)
— Теорема об угловой точке( Теорема №2)
— Теорема о соответствии опорному плану ЗЛП угловой точки многогранника решений ЗЛП (Теорема №3)