рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- Магнитные цепи с постоянной магнитодвижущей силой
Реферат Курсовая Конспект
Магнитные цепи с постоянной магнитодвижущей силой
Магнитные цепи с постоянной магнитодвижущей силой - раздел Физика, Министерство Общего И Профессионального Образования Российской Федер...
Министерство общего и профессионального образования
Российской Федерации
Санкт – Петербургский государственный институт точной
механики и оптики
(технический университет)
Кафедра электротехники
и прецизионных электромеханических систем
Кардонов Г. А.
Курс лекций
по “Электрическим машинам”
Санкт – Петербург
1. Расчет магнитный цепей
(общие сведения)

1.1. Магнитные цепи c постоянной магнитодвижущей силой
Магнитное поле представляет собой состояние материальной среды, обусловленное действием тока. Основной характеристикой магнитного поля является вектор магнитной индукции  . Величина и направление зависит как от конфигурации проводника с током, так и от характеристик среды. Зависимость от свойств среды выражается уравнением:
. Величина и направление зависит как от конфигурации проводника с током, так и от характеристик среды. Зависимость от свойств среды выражается уравнением:
= , (1.1)
, (1.1)
где
 - вектор направленности магнитного поля;
- вектор направленности магнитного поля;
 - магнитная проницаемость вакуума;
- магнитная проницаемость вакуума;
 - абсолютная магнитная проницаемость;
- абсолютная магнитная проницаемость;
 - относительная магнитная проницаемость.
- относительная магнитная проницаемость.
У ферромагнитных материалов величина  исключительно высока, но не постоянна; она изображается кривой намагничивания или дается в табличной форме. Для неферромагнитных тел зависимость
исключительно высока, но не постоянна; она изображается кривой намагничивания или дается в табличной форме. Для неферромагнитных тел зависимость  имеет линейный характер.
имеет линейный характер.
Между напряженностью H и током I существует взаимосвязь, носящая название закона полного тока (второй закон Кирхгофа для магнитной цепи):
 , (1.2)
, (1.2)
где  – магнитодвижущая сила (МДС).
– магнитодвижущая сила (МДС).
Если имеет то же направление, что и  , то при w=1 (рис. 1.1)
, то при w=1 (рис. 1.1)
 (1.3)
(1.3)

Рис.1.1. К закону полного тока (второй закон Кирхгофа для магнитной цепи).
Для катушек с числом витков wk имеем:
 .
.
Единица измерения H [ ].
].
Единица измерения B [Тл]; 1Тл=1 .
.
Магнитной цепью называют совокупность устройств, содержащих ферромагнитные тела, служащие для сосредоточения магнитного потока. Так как линии магнитной индукции замкнуты, то поток вектора магнитной индукции через замкнутую поверхность равен нулю:
Ф= . (1.4)
. (1.4)
Из этого выражения следует:
в неразветвленной магнитной цепи поток Ф на всех участках одинаков, а в разветвленной цепи связь между потоками подчиняются первому закону Кирхгофа:
Ф1+Ф2+… =
= =0. (1.5)
=0. (1.5)
Если вектор магнитной индукции одинаков во всех точках сечения S неразветвленной цепи и направлен перпендикулярно этому сечению, то его поток Ф= можно записать
можно записать
как
 , (1.6)
, (1.6)
( индекс к указывает участок, где B и S неизменны). BК= .
.
Подставив Bk в выражение полного тока, получим:  или
или  .
.
Отсюда получаем закон Ома для магнитной цепи:
Ф = , (1.7)
, (1.7)
где
- магнитное сопротивление цепи, имеющее размерность [
магнитное сопротивление цепи, имеющее размерность [ ]
]
При неизменном S и
 . (1.8)
. (1.8)
 Если магнитная цепь состоит из нескольких участков с различными и S (рис.1.2), то при расчете ее разбивают на участки с постоянными магнитной проницаемостью и сечением (рис. 1.2).
Если магнитная цепь состоит из нескольких участков с различными и S (рис.1.2), то при расчете ее разбивают на участки с постоянными магнитной проницаемостью и сечением (рис. 1.2).
а) б)
Рис.1.2.Схема электромагнитного реле (а) и схема замещения его магнитной цепи (б).
 ;
;  ;
; 
При расчете этой цепи закон Ома может быть применен в случае, если ее можно свести к линейной, то есть при выполнении неравенства , так как функция B=f(H) нелинейная и имеет вид гистерезиса (рис.1.3).
, так как функция B=f(H) нелинейная и имеет вид гистерезиса (рис.1.3).
Рис.1.3. Симметричная петля гистерезиса.
Ферромагнитные материалы с широкой петлей гистерезиса (Hc>4000 ) называют магнитотвердыми; их применяют для изготовления постоянных магнитов. Ферромагнитные материалы с узкой петлей гистерезиса (Hc<200 ) называются магнитомягкими; их применяют при изготовлении устройств, работающих в переменных магнитных полях.
Основная кривая намагничивания ферромагнитного материала, которая приводится в справочниках – это кривая, проходящая через вершины семейства его петель гистерезиса.
При расчетах магнитной цепи решаются две задачи: а) прямая задача расчета, которая заключается в определении МДС Iw по заданному потоку и б) обратная задача, когда по заданному значению МДС требуется определить поток Ф.
При решении прямой задачи по заданному потоку определяют индукцию на каждом участке магнитной цепи. Затем, пользуясь основными кривыми намагничивания, находят напряженность Hk. Зная Hklk ,определяют МДС F= .
.
Обратную задачу решают методом последовательного приближения. Задаваясь различными значениями потока Ф и рассчитав соответствующие значения МДС F, строят кривую Ф=f(F). По этой кривой для заданного значения F определяют искомое значение Ф.
Расчет магнитной цепи постоянного магнита
Постоянные магниты широко применяются в измерительных приборах, реле, генераторах и т. д. На рис.1.4 изображено тороидальное кольцо с воздушным зазором.Механические усилия в магнитном поле
На проводник с током I, помещенный в магнитное поле индукции B, воздействует сила, направление которой определяется правилом левой руки (если вектор… (1.10) гдеМагнитная цепь с переменной магнитодвижущей силой (МДС)
На рис. 1.7а показана схема подключения катушки с ферромагнитным сердечником к источнику синусоидального напряжения. Из закона Ома для магнитной цепи (1.7) () видно, что зависимость Ф=f(I) для…Рис.1.16. Условные обозначения трансформаторов: однофазного (а); трехфазного (б).
Основные соотношения для однофазного трансформатора
Трансформатор состоит из двух или более обмоток, расположенных на общем сердечнике, который для улучшения магнитной связи между обмотками… а) б)Холостой ход трансформатора
При холостом ходе трансформатора имеем (1.26)Режим нагрузки трансформатора
() При E1= U1 компенсация уменьшения потока производится за счет увеличения тока… . (1.28)Эквивалентная схема и параметры приведенного трансформатора
При расчетах необходимо сопоставить параметры первичной и вторичной цепей трансформатора. Если коэффициент трансформации велик, например, более 100, то изобразить векторные диаграммы первичной и вторичной цепей невозможно, т. к. при конкретных величинах векторов напряжении, токов и падений напряжений первичной (вторичной) цепи векторная диаграмма вторичной (цепи) вырождаются в точку. Эту проблему можно решить, если пользоваться приведенной схемой замещения трансформатора, в которой число витков вторичной обмотки равно числу витков первичной, но при этом не изменяются энергетические соотношения. Положим, что вторичная обмотка приводится к первичной, тогда
 ;
;  ;
;
 ;
;  ; (1.33)
; (1.33)
 ;
;  ;
;
 . (1.34)
. (1.34)
Так как реактивная мощность должна оставаться постоянной, то
 ;
;
 . (1.35)
. (1.35)
Эквивалентную схему замещения трансформатора (рис.1.20) заменяем схемой замещения приведенного трансформатора (рис.1.21).
Рис.1.20. Схема замещения трансформатора с учетом потерь в магнитопроводе.
 ;
; 
Рис.1.21. Схема замещения приведенного трансформатора с учетом потерь в магнитопроводе.
Режим короткого замыкания трансформатора
Режимом короткого замыкания называется режим, при котором вторичная обмотка замкнута накоротко. Если при опыте холостого хода определяются потери в…Особенности работы трехфазных трансформаторов
Все соотношения, которые мы получили для однофазных трансформаторов, справедливы и для трехфазных трансформаторов, точнее для одной фазы… Возьмем три однофазных трансформатора и подключим их к трехфазной цепи…Автотрансформатор
Автотрансформатор (рис. 1.31) имеет одну обмотку – обмотку высшего напряжения.
Обмотка низшего напряжения является частью обмотки высшего напряжения.
 . (1.44)
. (1.44)
Рис. 1.31. Принципиальная схема автотрансформатора.
Часть обмотки  можно выполнить тонким проводом, т. к. через нее протекает ток примерно равный разности величин
можно выполнить тонким проводом, т. к. через нее протекает ток примерно равный разности величин  , которая мала по сравнению с токами
, которая мала по сравнению с токами  и
и  . Это позволяет снизить габариты автотрансформатора по сравнению с трансформатором такой же мощности. Полная расчетная мощность общей части обмотки:
. Это позволяет снизить габариты автотрансформатора по сравнению с трансформатором такой же мощности. Полная расчетная мощность общей части обмотки:
 . (1.45)
. (1.45)
Полная расчетная мощность остальной части обмотки:
 . (1.46)
. (1.46)
Так как  ,
,
то
 . (1.47)
. (1.47)
Расчетная мощность трансформатора:
 . (1.48)
. (1.48)
При одной и той же передаваемой мощности:
 . (1.49)
. (1.49)
Чем ближе  к , тем выгоднее применение автотрансформатора. На практике
к , тем выгоднее применение автотрансформатора. На практике  ¸
¸ .
.
Измерительные трансформаторы
Измерительные трансформаторы применяются для изоляции измерительных приборов от высокого напряжения и расширения пределов измерения вольтметров и…Машины переменного тока
Принцип действия машин переменного тока (синхронных и асинхронных) обусловлен взаимодействием вращающегося магнитного поля, создаваемого обмотками статора, с током ротора. Поэтому, прежде чем приступить к анализу электромагнитных процессов в машинах переменного тока, рассмотрим, как образуется вращающееся магнитное поле.
Получение кругового вращающегося магнитного поля
Круговым вращающимся магнитным полем называется поле, вектор результирующей магнитной индукции которого неизменен и вращается с постоянной угловой…Асинхронная электрическая машина
Самым распространенным двигателем в промышленности является асинхронный двигатель. На рис.2.10 показаны конструкция и схема включения статорных и… б) а)Регулирование скорости вращения асинхронных двигателей
Скорость вращения асинхронного двигателя определяется зависимостью . Следовательно, ее можно регулировать, изменяя питающего напряжения, число пар полюсов и величину скольжения .…Создание вращающегося магнитного поля
Индукция в воздушном зазоре электрической машины переменного тока определяется распределением НС вдоль окружности статора. Если пренебречь магнитным…Пульсирующее поле
б) а) При питании синусоидальным током одной обмотки возникает магнитное поле,… Рис. 2.20. Диаграмма распределения НС в воздушном зазоре (а) и годографы…Круговое вращающееся магнитное поле
Если на статоре электрической машины разместить трехфазную обмотку, у которой оси фаз (A-X, B-Y, C-Z) сдвинуты в пространстве на (рис. 2.21) Рис. 2.21. Расположение фазных обмоток на статоре двухполюсной трехфазной машины.Эллиптическое поле
Круговое вращающееся магнитное поле возникает только при симметрии токов, проходящих по катушкам (симметрии НС катушек отдельных фаз), при… а) б) в)Требования, предъявляемые к исполнительным двигателям
Помимо общих требований (предъявляемых ко всем машинам: малые габариты и вес, дешевизна, высокий КПД, надежность и т.д.), к исполнительным… Самоход исполнительных двигателей. Наибольшая асимметрия магнитного поля в исполнительном двигателе будет иметь место…Уравнения токов идеализированного двигателя
Воспользуемся упрощенными схемами замещения ротора, в которых пренебрегается индуктивными сопротивлениями рассеяния ротора (рис. 2.26а, б): а) б)Механические характеристики
Электромагнитные мощности для полей прямой и обратной последовательностей:Регулировочные характеристики
Эти характеристики показывают, как изменяется скорость исполнительного двигателя при изменении коэффициента сигнала, если момент (нагрузка) на валу… На рис.2.27 б показаны зависимости при различных значениях , построенные по этому уравнению. Начальные точки кривых,…Мощности управления и возбуждения
Ток идеализированного двигателя является чисто активным, поэтому мощности обмоток управления и возбуждения будут определяться следующим образом: (2.77) Ток управления с учетом выражений для и (2.67 и 2.68):Механическая мощность
Механическая мощность двигателя в относительных единицах . (2.85) При заданном коэффициенте сигнала максимум механической мощности имеет место при скорости , определяемой из…Характеристики реального двигателя с амплитудным управлением. В реальном двигателе при скорость холостого хода больше, чем в идеализированном. Объясняется это тем, что с повышением относительной скорости ротора его индуктивное сопротивление сильнее влияет на ток ротора обратной последовательности , чем на ток прямой последовательности . Эти токи можно определить из схем замещения ротора по формулам
 (2.88)
(2.88)
из которых следует, что при увеличении относительной скорости  влияние индуктивного сопротивления на ток прямой последовательности уменьшается, а на ток обратной последовательности – увеличивается, т. к.
влияние индуктивного сопротивления на ток прямой последовательности уменьшается, а на ток обратной последовательности – увеличивается, т. к.  . Поэтому в реальном двигателе поток обратной последовательности меньше, чем в идеализированном, в связи с чем уменьшается и тормозит момент, образуемый этим потоком, что приводит к некоторому увеличению скорости вращения. Второй особенностью реальных механических характеристик является их криволинейность. Это также обусловливается, в основном, влиянием индуктивных сопротивлений двигателя, нарушающих линейную зависимость тока ротора от его относительной скорости.
. Поэтому в реальном двигателе поток обратной последовательности меньше, чем в идеализированном, в связи с чем уменьшается и тормозит момент, образуемый этим потоком, что приводит к некоторому увеличению скорости вращения. Второй особенностью реальных механических характеристик является их криволинейность. Это также обусловливается, в основном, влиянием индуктивных сопротивлений двигателя, нарушающих линейную зависимость тока ротора от его относительной скорости.
Регулировочные характеристики реального двигателя проходят выше характеристик идеализированного двигателя. Иными словами, при заданном относительном моменте требуемая скорость в реальном двигателе будет достигнута при меньшем коэффициенте сигнала.
Только при малых значениях  регулировочную характеристику можно считать линейной, положив
регулировочную характеристику можно считать линейной, положив  .
.
Мощности управления и возбуждения у реального двигателя. Ток возбуждения у реального двигателя практически не зависит от режима работы. Поэтому мощность возбуждения  остается примерно постоянной при всех значениях и . Мощность обмотки управления также не зависит от скорости вращения , но сильно меняется с изменением коэффициента сигнала, т. к.
остается примерно постоянной при всех значениях и . Мощность обмотки управления также не зависит от скорости вращения , но сильно меняется с изменением коэффициента сигнала, т. к.
 ,
,
где  - полное сопротивление обмотки управления.
- полное сопротивление обмотки управления.
Коэффициент мощности имеет максимум при пуске и равен 0,5-0,6 (у двигателя с полнм ротором). С возрастанием скорости  уменьшается. КПД у двигателя с полым немагнитным ротором невелик и равен 10-20% при
уменьшается. КПД у двигателя с полым немагнитным ротором невелик и равен 10-20% при  и
и  (рис. 2.29). Низкая величина КПД объясняется большими потерями в роторе (из-за увеличенного сопротивления) и в статоре (из-за очень большого тока холостого хода).
(рис. 2.29). Низкая величина КПД объясняется большими потерями в роторе (из-за увеличенного сопротивления) и в статоре (из-за очень большого тока холостого хода).
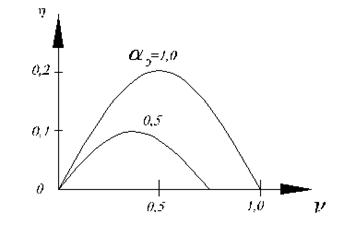
Рис. 2.29. Зависимость КПД реального двигателя с амплитудным управлением от относительной скорости вращения.
С уменьшением коэффициента сигнала КПД уменьшается, т.к. резко снижается полезная мощность, а потери и в статоре и в роторе уменьшаются сравнительно мало.
Исполнительный двигатель с фазовым управлением
Напряжения прямой и обратной последовательностей (как было показано выше):Механические и регулировочные характеристики идеализированного двигателя
Электромагнитная мощность с учетом выражения для и (2.93): (2.94) Следовательно, электромагнитный моментМощность управления
Фазовое управление применяется сравнительно редко из-за большой мощности управления при малом коэффициенте сигнала. Так при неподвижном роторе полная мощность обмотки управления , (2.98)Механические характеристики
В реальном исполнительном двигателе с амплитудно-фазовым управлением регулируется напряжение управления . Ток возбуждения при этом практически не… Рис. 2.33. Механические (а) и регулировочные (б) характеристики реального (сплошные линии) и идеального (пунктирные)…Сравнение исполнительных двигателей при различных методах управления
Проведенный анализ позволяет сделать следующие выводы: а) линейность механических и регулировочных характеристик выше всего при… б) Мощность управления при амплитудном и амплитудно-фазовом управлении практически одинакова и пропорциональна…Машины постоянного тока
4.1. Устройство, принцип действия и электромагнитный момент машины постоянного токаТак, например, если установить ротор приемника в положение и повернуть ротор датчика на угол =600 по часовой стрелке (рис. 5.10а), то вектор НС повернется относительно ротора приемника на угол =-=600 , но в противоположном направлении, т.е. против часовой стрелки(рис. 5.10б).
Продольная составляющая НС ротора в датчике  компенсируется НС, созданной компенсационным током, поступающим из сети в обмотку возбуждения (аналогично обычному трансформатору). В приемнике же НС ротора создает пульсирующий магнитный поток, продольная составляющая которого
компенсируется НС, созданной компенсационным током, поступающим из сети в обмотку возбуждения (аналогично обычному трансформатору). В приемнике же НС ротора создает пульсирующий магнитный поток, продольная составляющая которого  индуктирует в выходной обмотке (обмотке возбуждения) ЭДС:
индуктирует в выходной обмотке (обмотке возбуждения) ЭДС:
 , (5.2.9)
, (5.2.9)
где
E1m – действующее значение ЭДС в выходной обмотке в случае, когда вектор НС совпадает с осью этой обмотки.
Обычно удобнее иметь при согласованном положении приемника и датчика нулевой сигнал. Поэтому ротор и статор сельсина приемника при согласованном положении ведущей и ведомой осей предварительно смещают на 900 относительно ротора или статора сельсина – датчика. В этом случае выходной сигнал изменяется по закону
 (5.2.10)
(5.2.10)
При выборе сельсина, предназначенного для трансформаторного режима работы, важно знать величину удельного выходного напряжения, т.е. величину Uвых, приходящую на 10 угла рассогласования:
 (5.2.11)
(5.2.11)
Эта величина обычно приводится в паспорте сельсина. Для того, чтобы зависимость выходного сигнала Uвых от угла рассогласования  была по возможности близкой к синусоидальной, сельсины, предназначенные для работы в трансформаторном режиме, выполняют с неявно выраженными полюсами. Этим достигается существенное уменьшение высших гармоник в кривой ЭДС и повышение точности при передаче угла.
была по возможности близкой к синусоидальной, сельсины, предназначенные для работы в трансформаторном режиме, выполняют с неявно выраженными полюсами. Этим достигается существенное уменьшение высших гармоник в кривой ЭДС и повышение точности при передаче угла.
Индикаторные режимы работы однофазных сельсинов. В этом режиме на валу сельсина – приемника имеется незначительный момент сопротивления, поэтому для поворота ротора приемника вслед за поворотом ротора датчика требуется небольшой вращающий момент, который может быть получен от самого сельсина – приемника без дополнительных усилительных устройств.
Схема включения сельсинов для индикаторного режима имеет вид (рис. 5.11):

Рис. 5.11. Схема включения сельсинов при работе их в индикаторном режиме.
Пульсирующие магнитные потоки, создаваемые обмотками возбуждения датчика и приемника, индуктируют в трех фазах обмоток синхронизации ЭДС. Если между роторами датчика и приемника имеется некоторый угол рассогласования , то по обмоткам синхронизации будут протекать токи, которые, взаимодействуя с потоком возбуждения, создают в датчике и приемнике синхронизирующие моменты. Эти моменты имеют противоположные направления и стремятся свести к нулю угол рассогласования. Обычно ротор датчика заторможен, поэтому его синхронизирующий момент воспринимается механизмом, поворачивающим ведущую ось О1; синхронизирующий же момент приемника поворачивает его ротор в ту же сторону и на тот же угол, на который поворачивается ротор датчика.
В трех фазах обмотки синхронизации датчика потока возбуждения Фв индуцирует ЭДС:
 (5.2.12)
(5.2.12)
Так как обмотка возбуждения приемника присоединена к той же сети однофазного тока, то в фазах его обмотки синхронизации будет индуцироваться ЭДС:
 (5.2.13)
(5.2.13)
В виду того, что ЭДС в одноименных фазах датчика и приемника направлены по контуру, образованному проводами линии связи, встречно, токи в фазах датчика и приемника:
 (5.2.14)
(5.2.14)
Представим ток в фазах обмоток синхронизации в виде двух составляющих:
 (5.2.15)
(5.2.15)
где составляющая со «штрихом» обусловлены наличием ЭДС EД в обмотках датчика, а «два штриха» – ЭДС En в обмотках приемника. Это позволяет при определение НС в датчике и приемнике воспользоваться результатами, полученными для дифференциального режима работы сельсинов.
Составляющие токов  и
и  создают в датчике НС
создают в датчике НС
 , (5.2.16)
, (5.2.16)
направленную по продольной оси, а в приемнике НС-
 , (5.2.17)
, (5.2.17)
продольная и поперечная составляющие которой равны
 (5.2.18)
(5.2.18)
Составляющие же токов  и
и создают в приемнике НС
создают в приемнике НС
 , (5.2.19)
, (5.2.19)
направленную по продольной оси, а в датчике НС  ,продольная и поперечная составляющая которой равны:
,продольная и поперечная составляющая которой равны:
 (5.2.20)
(5.2.20)
. 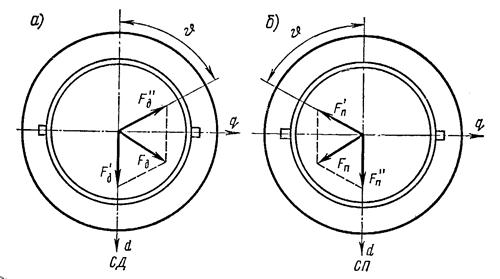
Рис. 5.12. Составляющие векторов НС ротора FД и FП в датчике (а) и в приемнике (б), обусловленные действием ЭДС ЕД и ЕП.
При этом результирующие НС (рис. 5.12) будeт иметь следующие составляющие:
В датчике
 ; (5.2.21)
; (5.2.21)
в приемнике
 (5.2.22)
(5.2.22)
При =0 НС в датчике и приемнике будут равны нулю, т. к. ЭДС в фазах обмоток синхронизации датчика и приемника взаимно компенсируется и ток в этих фазах отсутствует.
При наличии угла рассогласования появляются токи и НС ротора, величины которых в датчике и приемнике одинаковы:
 (5.2.23)
(5.2.23)
 .
.
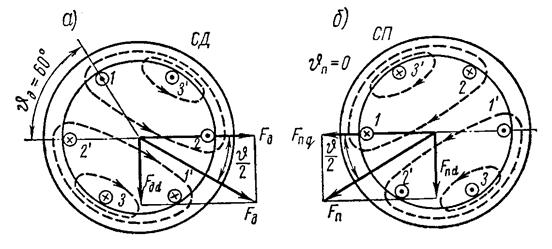
Рис. 5.13. Положение векторов НС ротора FД и FП в датчике (а) и в приемнике (б) при повороте ротора датчика на угол  .
.
На рис. 5.13 показаны токи и НС датчика и приемника при угле рассогласования датчика  =600 и приемника-
=600 и приемника-  =00. НС ротора датчика FД смещается относительно поперечной оси в сторону поворота датчика на угол
=00. НС ротора датчика FД смещается относительно поперечной оси в сторону поворота датчика на угол  . В приемнике НС Fn смещается на такой же угол , но в обратном направлении, и поперечная составляющая Fnq направлена противоположно поперечной составляющей FДq НС ротора датчика.
. В приемнике НС Fn смещается на такой же угол , но в обратном направлении, и поперечная составляющая Fnq направлена противоположно поперечной составляющей FДq НС ротора датчика.
Продольные составляющие FДd и Fnd НС ротора датчика и приемника создают в обеих обмотках возбуждения компенсационные токи (аналогично трансформатору), НС которых компенсирует действие НС FДd и Fnd. Поперечные же составляющие FДq и Fnq, оставшиеся нескомпенсированными, взаимодействуют с потоком статора, создавая в датчике и приемнике синхронизирующие моменты.
 .
.
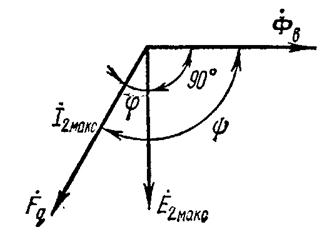
Рис. 5.14. Векторная диаграмма для ротора сельсина-приемника.
Векторная диаграмма для ротора сельсина (рис. 5.14) подобна векторной диаграмме для ротора асинхронного двигателя. Поперечная составляющая  НС ротора совпадает по фазе с током ротора
НС ротора совпадает по фазе с током ротора  и отстает от вектора потока возбуждения
и отстает от вектора потока возбуждения  на угол y=900+j. Величину и направление синхронизирующего момента можно определить также, как и в обычной асинхронной машине, считая, что момент создается активной составляющей ротора. Это наглядно показано на рис. 5.15,
на угол y=900+j. Величину и направление синхронизирующего момента можно определить также, как и в обычной асинхронной машине, считая, что момент создается активной составляющей ротора. Это наглядно показано на рис. 5.15,

Рис. 5.15. Схема возникновения синхронизирующего момента в датчике (а) и в приемнике (б).
где крестиками и точками показано направление составляющих тока ротора, соответствующих некомпенсированным поперечным НС FДq и Fnq. Из рис. 5.15 следует, что синхронизирующие моменты в датчике и приемнике направлены в противоположные стороны и стремятся повернуть оба ротора в согласованное положение. На ротор датчика действует момент Мc.Д., стремящийся возвратить ротор в исходное положение, а на ротор приемника - момент Мc.n, увлекающий его в сторону поворота ротора датчика.
Мгновенное значение синхронизирующего момента:
 (5.2.24)
(5.2.24)
где С и С1 – постоянные.
Следовательно, при заданном угле рассогласования синхронизирующий момент изменится в соответствии с изменением угла wt.
Среднее значение синхронизирующего момента:
 (5.2.25)
(5.2.25)
Принимая sinj=const и обозначая  ,получим
,получим
 . (5.2.26)
. (5.2.26)
Таким образом, средняя величина синхронизирующего момента пропорциональна синусу угла рассогласования. Для того, чтобы сельсины обладали свойством самосинхронизации в пределах одного оборота, их обычно выполняют двухполюсными так, что геометрический угол поворота роторасоответствует «электрическому» углу.
Из рис. 5.16а, следует, что синхронизирующий момент равен нулю при углах рассогласования =0 и=180, т. е. рассматриваемая система передачи угла на сельсинах имеет в пределах одного оборота две точки согласованного положения ротора датчика и приемника. Однако, в действительности согласованное положение соответствует =0, т.к. при =1800 имеет место неустойчивое равновесие: при малейшем отклонении ротора в ту или иную сторону от этой точки возникает синхронизирующий момент стремящийся ликвидировать угол рассогласования и сделать его равным нулю.

Рис. 5.16. Зависимости синхронизирующего момента от угла рассогласования в сельсинах с неявновыраженными (а) и явновыраженными (б) полюсами
Величина максимального синхронизирующего момента Mm зависит от произведения
F2m sinj. Так как  а
а  , то момент
, то момент
 (5.2.27)
(5.2.27)
где
A и B – постоянные;
UB – напряжение, подаваемое на обмотку возбуждения сельсинов.
Z2,r2 и x2 – суммарное, активное и индуктивное сопротивления последовательно включенных фаз датчика и приемника (для сельсинов с явновыраженными полюсами (рис. 5.16б) берут значения Z2 и x2 приведенные к поперечной оси сельсина).
Взяв производную момента Mm по x2 и прировняв её нулю, можно определить значение x2, при котором этот момент имеет наибольшую величину:
 ,
,
отсюда x2= r2.
Таким образом, для получения наибольшей величины Mm необходимо иметь равные индуктивное и активное сопротивления ротора сельсина.
Важной характеристикой сельсина является удельный синхронизирующий момент (момент, приходящийся на 10 угла рассогласования).
 (5.2.28)
(5.2.28)
Часто этим термином обозначают также крутизну S нарастания синхронизирующего момента в начальной части характеристики M=¦(), т.е.
 . (5.2.29)
. (5.2.29)
Момент  представляет собой тангенс угла наклона b характеристики M=¦() в её начальной части. Чем больше величина
представляет собой тангенс угла наклона b характеристики M=¦() в её начальной части. Чем больше величина  и , тем при меньшем угле рассогласования будет преодолен момент от сил трения, действующих на ротор и, следовательно, тем меньшей будет статическая погрешность сельсина.
и , тем при меньшем угле рассогласования будет преодолен момент от сил трения, действующих на ротор и, следовательно, тем меньшей будет статическая погрешность сельсина.
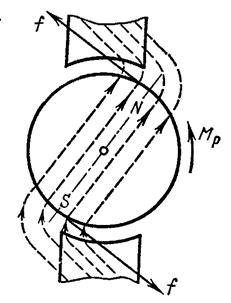
Для увеличения удельного синхронизирующего момента при малых углах рассогласования сельсины, предназначенные для работы в индикаторном режиме, выполняются, как правило, с сосредоточенной обмоткой возбуждения и явно выраженными полюсами на статоре. Благодаря этому появляется дополнительный реактивный момент Мр, который усиливает результирующий удельный синхронизирующий момент примерно на 10..20 %.
Возникновение реактивного момента можно объяснить притяжением ротора, являющегося электромагнитом, к выступающим полюсам статора (рис. 5.17).
 .
.
Рис. 5.17. Схема возникновения реактивного момента.
Погрешность в сельсинах. Погрешность при работе сельсинов в индикаторном и трансформаторном режимах вызываются электрической, магнитной и механической асимметрией датчика и приемника, обусловленными технологическими причинами, влиянием высших гармоник в кривой НС ротора, влиянием сопротивления линии связи, изменением напряжения питающей сети и др. Кроме того, при работе сельсинов в трансформаторном режиме погрешность в работе сельсинов может быть вызвана тормозным моментом на валу приемника.
Устранить технологические погрешности можно, обеспечив высокую точность штамповки листов ротора и статора и сборки их пакетов, строгую концентричность цилиндрических поверхностей ротора и статора (равномерность воздушного зазора, тщательную балансировку ротора и пр.). Уменьшить высшие гармоники в кривой НС ротора можно применением синусных (точных) обмоток. При работе сельсинов в трансформаторном режиме весьма важно, чтобы при =0 было мало остаточное напряжение в выходной обмотке (нулевой сигнал). В современных сельсинах благодаря высокому качеству изготовления и использованию точных обмоток удается уменьшить нулевой сигнал до 0,2..0,3%.
В тех случаях, когда датчик удален на значительное расстояние от приемника, сопротивление линии связи становится соизмеримым с собственным сопротивлением обмоток синхронизации. Это приводит к уменьшению тока в обмотках синхронизации датчика и приемника, вследствие чего уменьшается выходное напряжение  приемника при работе сельсинов в трансформаторном режиме и величина синхронизирующего момента Мс при работе в индикаторном режиме. Аналогично влияет и падение напряжения в скользящих контактах.
приемника при работе сельсинов в трансформаторном режиме и величина синхронизирующего момента Мс при работе в индикаторном режиме. Аналогично влияет и падение напряжения в скользящих контактах.
Для уменьшения влияния контактов на работу сельсинов и снижения трения в их подвижных частях стремятся по возможности уменьшить число скользящих контактов.
С этой целью обмотку синхронизации, в большинстве случаев, располагают на статоре, а возбуждения – на роторе. Тогда изменение переходного сопротивления контактов мало сказывается на точности работы системы передачи угла; выход их из строя не приводит к полному нарушению работы системы (в этом случае сельсин – приемник работает как синхронный реактивный двигатель). Недостатком сельсинов с обмоткой возбуждения на роторе является то, что ток через скользящие контакты проходит у них постоянно, в то время как у сельсинов с обмоткой возбуждения на статоре контакты пропускают ток только в момент отработки угла. Однако токи возбуждения сельсинов обычно малы, поэтому надежность работы сельсинов с обмоткой возбуждения на роторе будет значительно выше, чем при расположении её на статоре.
Если сельсины работают в индикаторном режиме, то при значительных расстояниях между датчиком и приемником напряжение, подводимые к их обмоткам возбуждения, могут несколько отличаться по величине и фазе. В этом случае даже при согласованном положении роторов датчика и приемника по обмоткам синхронизации будет проходить ток и возникает определенная погрешность. Для её устранения в цепь возбуждения одной из машин включают дополнительное активно-индуктивное сопротивление, с помощью которого выравнивают по величине и фазе напряжения, подводимые к обмотке возбуждения.
При работе сельсинов в трансформаторном режиме выходная обмотка приемника обычно включается на высокоомный вход усилителя. В этом случае ток в обмотке очень мал и можно сказать, что Uвых@Eвых. Однако, если сопротивление нагрузки Zн не очень велико, то ток нагрузки  создает определенную погрешность. Так как
создает определенную погрешность. Так как
 , (5.2.30)
, (5.2.30)
где
Z1 – сопротивление обмотки статора, то выходное напряжение
 ; (5.2.31)
; (5.2.31)
Таким образом, с увеличением нагрузки выходное напряжение (при одном и том же угле рассогласования) уменьшается. Кроме того, при большой нагрузке возникает реакция выходной обмотки, приводящая к таким же искажениям зависимости Uвых=¦(), как и в поворотных трансформаторах.
При работе сельсинов в индикаторном режиме тормозной момент на валу приемника создает довольно существенную погрешность. Так как тормозной момент, создаваемый нагрузкой, в рассматриваемом режиме обычно весьма мал; основное влияние на точность передачи угла оказывает трение в подшипниках приемника и трение щеток о контактные кольца. Погрешность, вызванная моментом трения Мтр сельсина – приемника, характеризует его зону нечувствительности Dтр, в пределах которой ротор приемника может занимать любое положение при одном и том же положении датчика.
Величина этой зоны определяется отношением
 ; (5.2.32)
; (5.2.32)
чем больше величина  и
и  , тем при меньшем угле рассогласования будет преодолен момент трения Мтр и тем меньше будет погрешность в передаче угла. При работе сельсинов в трансформаторном режиме момент трения, приложенный к ведомой оси, не оказывает влияния на точность передачи угла, так как этот момент воспринимается исполнительным двигателем.
, тем при меньшем угле рассогласования будет преодолен момент трения Мтр и тем меньше будет погрешность в передаче угла. При работе сельсинов в трансформаторном режиме момент трения, приложенный к ведомой оси, не оказывает влияния на точность передачи угла, так как этот момент воспринимается исполнительным двигателем.
Ток в фазе ротора при индивидуальном питании от датчика одного приемника
 , (5.2.33)
, (5.2.33)
а при групповом питании нескольких приемников
 . (5.2.34)
. (5.2.34)
Так как максимальный синхронизирующий момент пропорционален НС  , то есть току, протекающему по обмотке ротора, то при питании нескольких приемников от одного датчика максимальный момент приемника уменьшается в отношении
, то есть току, протекающему по обмотке ротора, то при питании нескольких приемников от одного датчика максимальный момент приемника уменьшается в отношении
 (5.2.35)
(5.2.35)
То есть погрешность каждого приемника будет больше, чем при индивидуальном питании. Чтобы не допустить увеличение погрешности обычно при групповом питании в качестве датчика используют сельсин с уменьшенным сопротивлением, то есть применяют для этой цели сельсин большей мощности.
В режиме непрерывного вращения сельсинов помимо рассмотренных выше трансформаторных ЭДС в фазах обмотки ротора, датчика и приемника возникают ЭДС вращения, которые по мере роста скорости вращения n уменьшают синхронизирующий момент. Величину динамического синхронизирующего момента в режиме вращения  можно найти, используя метод симметричных составляющих. Однако при практических расчетах часто используют формулу Эйлера
можно найти, используя метод симметричных составляющих. Однако при практических расчетах часто используют формулу Эйлера
 (5.2.36)
(5.2.36)
где
 - относительная скорость вращения ротора сельсина. Согласно (5.2.36) на рис. 5.18 показана зависимость
- относительная скорость вращения ротора сельсина. Согласно (5.2.36) на рис. 5.18 показана зависимость  .
.

Рис. 5.18. Зависимость динамического синхронизирующего момента от относительной скорости  .
.
Обычно при  динамический синхронизирующий момент приблизительно равен статическому
динамический синхронизирующий момент приблизительно равен статическому  . Поэтому, если требуется осуществить синхронное вращение нескольких осей при больших абсолютных значениях скорости, то обмотку возбуждения целесообразно питать от источника переменного тока повышенной частоты (чтобы относительная скорость была небольшой).
. Поэтому, если требуется осуществить синхронное вращение нескольких осей при больших абсолютных значениях скорости, то обмотку возбуждения целесообразно питать от источника переменного тока повышенной частоты (чтобы относительная скорость была небольшой).
В зависимости от величины допускаемой погрешности сельсины подразделяются на три класса точности (1,2 и 3). При работе сельсинов в индикаторном режиме погрешность датчика значительно меньше, чем у приемника, так как на последнюю погрешность сильно влияет момент трения. При работе в трансформаторном режиме момент трения приемника воспринимается исполнительным двигателем, поэтому погрешность сельсинов в этом режиме меньше, чем в индикаторном.
5.2.1. Сельсины с одной обмоткой синхронизации.
Для индикаторной передачи угла могут быть использованы сельсины с одной обмоткой на роторе, называемые одноосными (рис.5.19).
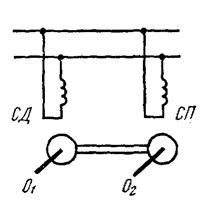
Рис. 5.19. Схема включения одноосных сельсинов.
Если оси обмоток ротора датчика и приемника образуют с осью обмотки статора углы, равные соответственно иn, то ток в этих обмотках:

Подставляя значения
Д-n=;
2Д-n=+Д;
Д+n=2Д-n,
получаем

 (5.3.1)
(5.3.1)
Намагничивающая сила, создаваемая обмоткой ротора, будет пропорциональна току I2:
 (5.3.2)
(5.3.2)
Синхронизирующий момент можно определить, как и в сельсине с трехфазной обмоткой по выражению:
 . (5.3.3)
. (5.3.3)
Так как в данном случае поперечные составляющие НС ротора датчика и ротора приемника:
то формулы для синхронизирующих моментов датчика и приемника будут иметь вид:
 (5.3.4)
(5.3.4)
Из этих выражений следует, что величина синхронизирующего момента сельсина приемника зависит не только от угла рассогласования, но и от положения ротора приемника. При n=0 и n=1800 синхронизирующий момент Мс=0 при любом угле рассогласования, т. к. в этом случае поперечная составляющая НС ротора приемника Fnq=0. При Д=-n в обмотках роторов приемника и датчика будут индуктироваться равные ЭДС, вследствие чего ток в этих обмотках и синхронизирующий момент так же будут равны нулю. Эти свойства одноосного сельсина ограничивают его применение только теми случаями, когда угол n изменяется в пределах от 0 до 1800. Характерной особенностью одноосного сельсина является то, что синхронизирующие моменты датчика и приемника не равны между собой. Это позволяет использовать такой сельсин в качестве усилителя момента, передаваемого от датчика к приемнику
5.2.2. Дифференциальные сельсины.
Дифференциальный сельсин используется в тех случаях, когда требуется поворачивать ведомую ось О2 на угол, равный сумме или разности углов поворота двух ведущих осей О1 и O1/ (рис. 5.20).

Рис. 5.20. Схема включения дифференциального сельсина.
В этом случае с ведущими осями механически связаны два сельсина – датчика СД1 и СД2, а с ведомой осью – дифференциальный сельсин ДС. Сельсины – датчики выполнены обычным образом, т. е. имеют однофазную обмотку возбуждения и трехфазную обмотку синхронизации. Конструкция же дифференциального сельсина подобна трехфазному асинхронному двигателю: он имеет на статоре и роторе по три распределенных обмотки, оси которых сдвинуты между собой на 1200; обмотка статора присоединена к обмотке синхронизации датчика СД1, а обмотка ротора – к обмотке синхронизации датчика СД2.
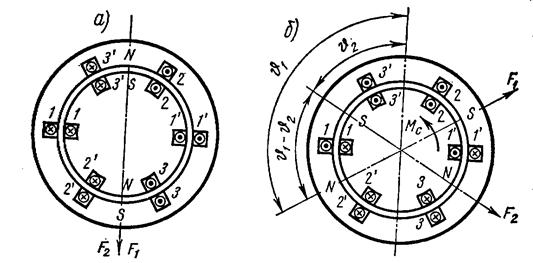
Рис. 5.21. Векторы НС ротора (а) и статора (б) в дифференциальном сельсине при повороте роторов датчика.
В рассматриваемой схеме при любых углах поворота 1 и 2 роторов датчиков СД1 и СД2 в цепях их обмоток синхронизации протекают токи, определяемые ЭДС, индуктированными в фазах соответствующих обмоток. В дифференциальном сельсине, выполняющим роль приемника, эти токи создают НС статора F1 и ротора F2, которые также как и при работе сельсинов в трансформаторном режиме, смещены относительно оси первой фазы статора и ротора (от которой ведется отсчет) соответственно на угол 1 и 2. Если 1=2 намагничивающие силы занимают одинаковое положение в пространстве и существуют только радиальные силы притяжения между статором и ротором. При 1¹2 между осями намагничивающих сил статора и ротора образуется угол (рис.5.21б), равный 1 -2, если роторы датчиков повернуты в одну сторону, и 1 +2 – при повороте роторов датчиков в противоположные стороны. В результате этого появляется вращающий момент Мс, под действием которого ротор дифференциального сельсина поворачивается в сторону оси НС статора F1, т.е. происходит отработка угла =1 ±2.
5.3. Магнесины
Магнесины являются миниатюрными бесконтактными сельсинами и применяются в системах передачи угла при весьма малых моментах сопротивления на валу приемника (индикаторный режим) и малом расстоянии между датчиком и приемником. Статор магнесина выполнен из листового пермаллоя в виде тороида, на котором намотана спиральная обмотка, подключенная к сети переменного тока (рис. 5.22).

Рис. 5.22. Схема включения магнесина.
Эта обмотка имеет два вывода расположенных под углом 1200 относительно друг друга и относительно точек, к которым подключаются питающие провода. Линия связи ЛС (одним из её каналов является питающая сеть) соединяет одноименные точки а, б и в обмоток статора датчика и приемника. Ротор магнесина представляет собой постоянный магнит цилиндрической формы, намагниченный по диаметру. При питании обмотки статора переменным током, изменяющимся с частотой ¦1, возникает переменный магнитный поток возбуждения Фв, замыкающийся по тороиду (рис. 5.23).
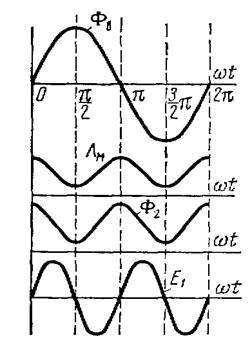
Рис. 5.23. Графики изменения во времени магнитных потоков и
и  , магнитной проницаемости тороида
, магнитной проницаемости тороида  и ЭДС
и ЭДС  в обмотке ротора.
в обмотке ротора.
Пермаллой, из которого изготовлен тороид, резко изменяет свою магнитную проницаемость при подмагничивании, т. к. он имеет весьма малую коэрцитивную силу (узкую петлю гистерезиса). Поэтому магнитная проводимость тороида зависит только от абсолютной величины потока Фв и изменяется с двойной частотой 2¦1, достигая наибольшего и наименьшего значений соответственно при Фв равном нулю и максимуму. Так как НС ротора F2, создаваемая постоянным магнитом, неизменна во времени, то поток ротора Ф2 изменяется в соответствии с изменением , т.е. пульсирует с двойной частотой 2¦1. В результате на участках аб, бв и ва обмотки статора индуцируются ЭДС Е1,изменяющиеся с двойной частотой 2¦1. Величина этих ЭДС зависит от положения ротора по отношению к указанным участкам; суммарная же ЭДС по всему контуру обмотки в любой момент времени равна нулю. Если датчик и приемник находятся в согласованном положении, то по проводам линии связи ток не проходит, т.к. соединяемые этими проводами точки обмоток приемника и датчика являются эквипотенциальными как по отношению к основной ЭДС, имеющей частоту f1 , так и по отношению к ЭДС двойной частоты. Однако при рассогласовании, когда роторы датчика и приемника занимают различные положения, ЭДС двойной частоты, индуцируемые на одноименных участках обмоток приемника и датчика, различны и по ним протекают токи частоты 2¦1. Эти токи, взаимодействуя с пульсирующим потоком Ф2 ротора, создают синхронизирующие моменты, стремящиеся повернуть роторы датчика и приемника в согласованное положение. По отношению к ЭДС основной частоты точки а, б и в датчика и приемника остаются эквипотенциальными при любых положениях ротора, т. к. поток возбуждения Фв замыкается по тороиду, минуя ротор.
Магнесины, как и сельсины, обладают свойством самосинхронизации в пределах одного оборота, т. к. роторы их поляризованы. Удельный синхронизирующий момент у них небольшой, но из-за малого веса и небольшой инерции ротора магнесины позволяют на небольших расстояниях передавать угол со сравнительно небольшой погрешностью(1-2,50).
5.4. Трехфазные сельсины
В схемах синхронной связи на трехфазных сельсинах в качестве датчика СД и приемника СП используются два обычных асинхронных двигателя с фазными роторами. Их обмотки статора подключаются к общей трехфазной сети переменного тока, а обмотки ротора соединяются друг с другом через контактные кольца (рис. 5.24).
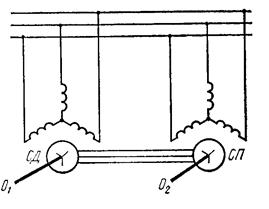
Рис. 5.24. Схема включения трехфазных сельсинов.
При подключении обмоток статора датчика и приемника к сети в сельсинах возникает круговое вращающееся поле, которое индуктирует в одной из фаз ротора датчика ЭДС
 (5.6.1)
(5.6.1)
а в одноименной фазе ротора приемника – ЭДС
 , (5.6.2)
, (5.6.2)
где
, - углы, образуемые осями одноименных фаз ротора и статора датчика и
приемника.
Знак “+” ставится, если ротор датчика или приемника повернут навстречу вращающемуся полю, а “-”, если он повернут в направлении поля.
При согласованном положении ведущей О1 и ведомой О2 осей, когда углы поворота роторов датчика и приемника равны, ЭДС ЕД и ЕП, индуктированные в одноименных фазах роторов, равны и направлены встречно (рис. 5.25а), вследствие чего по обмоткам роторов ток не протекает. При этом синхронизирующий момент Мс=0.
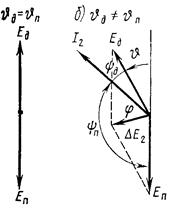
а) б)
Рис. 5.25. Векторная диаграмма ЭДС и токов для роторной цепи трехфазных сельсинов при отсутствии (а) и при наличии (б) рассогласования.
При появлении угла рассогласования  в контуре одноименных фаз обмотки ротора возникает разность ЭДС
в контуре одноименных фаз обмотки ротора возникает разность ЭДС  (рис. 5.25б), которая создает уравнительный ток
(рис. 5.25б), которая создает уравнительный ток
 . (5.6.3)
. (5.6.3)
Этот ток отстает от вектора  на угол
на угол  , тангенс которого равен
, тангенс которого равен
 . (5.6.4)
. (5.6.4)
При взаимодействии уравнительного тока с магнитным потоком Ф в датчике и приемнике возникают синхронизирующие моменты:
 ; (5.6.5)
; (5.6.5)
 , (5.6.6)
, (5.6.6)
где
 ,
,  - углы сдвига фаз между током ротора и ЭДС датчика и приемника.
- углы сдвига фаз между током ротора и ЭДС датчика и приемника.
Если ротор датчика повернут на положительный угол  относительно ротора приемника, то в датчике активная составляющая тока совпадает с ЭДС ЕД (рис.5.6.2б). Поэтому синхронизирующий момент действует на ротор в направлении вращения магнитного поля и стремится повернуть его в исходное положение. В роторе приемника активная составляющая тока противоположна по фазе с ЭДС ЕП. Поэтому синхронизирующий момент стремится повернуть ротор приемника против вращения поля так, чтобы он занял согласованное с ротором датчика положение.
относительно ротора приемника, то в датчике активная составляющая тока совпадает с ЭДС ЕД (рис.5.6.2б). Поэтому синхронизирующий момент действует на ротор в направлении вращения магнитного поля и стремится повернуть его в исходное положение. В роторе приемника активная составляющая тока противоположна по фазе с ЭДС ЕП. Поэтому синхронизирующий момент стремится повернуть ротор приемника против вращения поля так, чтобы он занял согласованное с ротором датчика положение.
Характерной особенностью трехфазных сельсинов является то, что синхронизирующие моменты в датчике и приемнике различны, т. к. различны углы и , а следовательно и активные составляющие тока. Это является недостатком трехфазных сельсинов т. к. кривая  имеет несимметричный характер в зависимости от того, вращается ротор по направлению поля или против него. В результате точность передачи угла на трехфазных сельсинах будет зависеть от направления вращения ротора датчика.
имеет несимметричный характер в зависимости от того, вращается ротор по направлению поля или против него. В результате точность передачи угла на трехфазных сельсинах будет зависеть от направления вращения ротора датчика.
Другим существенным недостатком трехфазных сельсинов является необходимость иметь трехфазный источник питания, поэтому трехфазные сельсины применяются обычно только для синхронного вращения машин большой мощности. Схема включения трехфазных сельсинов получила название электрического вала (рис.5.26).
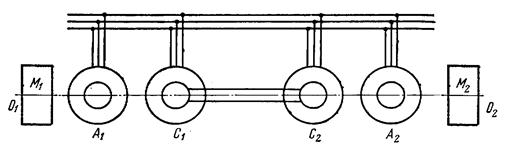
Рис. 5.26. Схема электрического вала.
Рабочие механизмы  и
и  приводятся во вращение мощными асинхронными двигателями
приводятся во вращение мощными асинхронными двигателями  и
и  .С ними спарены вспомогательные двигатели
.С ними спарены вспомогательные двигатели  и
и  (сельсины), соединенные между собой линией связи. При синхронном вращении валов ток в роторах сельсинов отсутствует. При наличии рассогласования в сельсинах возникают синхронизирующие моменты, один из которых увеличивает момент на валу отставшего механизма, а второй тормозит вал механизма, работающего с опережением. Вследствие этого система снова приходит в согласованное положение. Мощность вспомогательных асинхронных двигателей- сельсинов обычно берется равной 10-15% от мощности главных двигателей.
(сельсины), соединенные между собой линией связи. При синхронном вращении валов ток в роторах сельсинов отсутствует. При наличии рассогласования в сельсинах возникают синхронизирующие моменты, один из которых увеличивает момент на валу отставшего механизма, а второй тормозит вал механизма, работающего с опережением. Вследствие этого система снова приходит в согласованное положение. Мощность вспомогательных асинхронных двигателей- сельсинов обычно берется равной 10-15% от мощности главных двигателей.
5.5. Асинхронный тахогенератор
В идеальном случае тахогенератор должен давать на выходе напряжение U, пропорциональное скорости вращения n:
 ; (5.7.1)
; (5.7.1)
 . (5.7.2)
. (5.7.2)
( - угол поворота ротора тахогенератора.)
- угол поворота ротора тахогенератора.)
Зависимость U= f(n) называется выходной характеристикой.
Тахогенераторы служат для:
- измерения скорости вращения;
- выработки ускоряющих и замедляющих сигналов;
- выполнения операция дифференцирования.
При измерении скорости вращения обычно допустима погрешность 1÷2,5%.
Наибольшая точность требуется в тахогенераторах, работающих в качестве дифференцирующего звена в вычислительных устройствах. В этом случае ошибка в линейности выходной характеристики не должна превышать 0,05÷0,3% по амплитуде. Помимо основного требования к линейной выходной характеристике к ним предъявляются и другие требования: надежность работы в широком диапазоне изменения температуры, влажности, при вибрации и ударных нагрузках; высокое быстродействие; простота устройства; малые размеры и вес; бесшумность и отсутствие радиопомех.
Наиболее полно этим требованиям удовлетворяет асинхронный тахогенератор с полым немагнитным ротором.
Конструкция его аналогична конструкции асинхронного исполнительного двигателя с полым немагнитным ротором (рис. 5.27).

Рис.5.27. Схема асинхронного тахогенератора.
На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 90°.
По обмотке возбуждения проходит переменный ток, создавая магнитный поток Фd, пульсирующий с частотой сети f. Этот поток распределен в пространстве практически синусоидально, и ось его совпадает с осью обмотки возбуждения (рис. 5.28a), называемой продольной осью. Поэтому поток, создаваемый обмоткой возбуждения, называется продольным.
При неподвижном роторе магнитный поток Фd индуктирует в обмотке возбуждения ЭДС.

Пренебрегая активным сопротивлением обмотки возбуждения и индуктивным сопротивлением рассеяния можно записать:
 (5.7.3)
(5.7.3)
Выходная обмотка расположена под углом 90° по отношению к обмотке возбуждения ЭДС в выходной обмотке, а значит и напряжение на нагрузке равно нулю. Часть потока в виду неидеальности симметрии наводит в выходной обмотке Г ЭДС называемую остаточной.
В каждом элементарном проводнике полого ротора пульсирующий поток индуктирует ЭДС  и появляется, вызываемый ею ток
и появляется, вызываемый ею ток  . Так как активное сопротивление полого ротора во много раз больше индуктивного, то ЭДС и вызываемый ею в роторе ток практически совпадают по фазе. Поэтому создаваемая током намагничивающая сила
. Так как активное сопротивление полого ротора во много раз больше индуктивного, то ЭДС и вызываемый ею в роторе ток практически совпадают по фазе. Поэтому создаваемая током намагничивающая сила  ротора будет действовать по продольной оси машины. На рис.5.28а показано направление ЭДС , тока и НС в момент времени, когда поток
ротора будет действовать по продольной оси машины. На рис.5.28а показано направление ЭДС , тока и НС в момент времени, когда поток  уменьшается.
уменьшается.
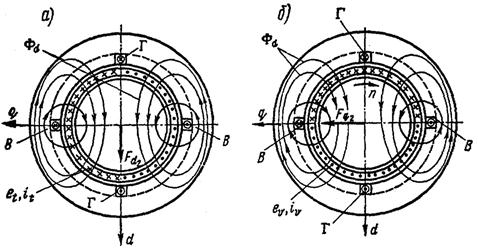
Рис. 5.28. Распределение ЭДС и токов в роторе при неподвижном (а) и вращающемся (б) роторе.
Как и в трансформаторе, появление МДС ротора приводит к появлению компенсирующего тока в обмотке возбуждения. При вращении ротора в элементарных проводниках помимо трансформаторной ЭДС индуктируется еще и ЭДС вращения :
:
 , (5.7.4)
, (5.7.4)
где
Вх – индукция в воздушном зазоре в рассматриваемой точке в данное мгновение;
Lv – длина ротора в магнитном поле;
V2 – окружная скорость ротора.
Поскольку поток Фd пульсирует с частотой f сети, то и индуктируемые им ЭДС также будут пульсировать с этой же частотой. При синусоидальном законе распределения индукции Вх вдоль окружности ротора максимальное значение ЭДС в любой момент времени будет иметь место в элементарном проводнике, расположенном по продольной оси машины. На рис.5.28б показано мгновенное направление ЭДС вращения и создаваемого ею потока  в элементарных проводниках полного ротора. При любой скорости вращения направление ЭДС в элементах ротора, расположенных по обе стороны от поперечной оси, будет противоположным. Так же как и в случае с , направление совпадает с направлением вызванного ею . При этих условиях токи ротора будут создавать МДС
в элементарных проводниках полного ротора. При любой скорости вращения направление ЭДС в элементах ротора, расположенных по обе стороны от поперечной оси, будет противоположным. Так же как и в случае с , направление совпадает с направлением вызванного ею . При этих условиях токи ротора будут создавать МДС  и пульсирующий магнитный поток
и пульсирующий магнитный поток  , которые будут направлены по поперечной оси. От действия потока в выходной обмотке Г индуктируется ЭДС.
, которые будут направлены по поперечной оси. От действия потока в выходной обмотке Г индуктируется ЭДС.
 , (5.7.5)
, (5.7.5)
где
- число витков выходной обмотки.
Очевидно, что частота ЭДС в выходной обмотке не зависит от скорости вращения ротора и при любых условиях равна частоте сети f.
Согласно закону Ома:
 .
.
В асинхронной машине с полным немагнитным ротором воздушный зазор очень велик, магнитное сопротивление  примерно равно магнитному сопротивлению воздушного зазора, т. к. магнитное сопротивление участков магнитопровода пренебрежимо мало. Следовательно, магнитный поток по поперечной оси практически пропорционален намагничивающей силе , которая в вою очередь пропорциональна току и ЭДС вращения ротора. Но, так как ЭДС вращения прямо пропорциональна потоку Фq и скорости ротора
примерно равно магнитному сопротивлению воздушного зазора, т. к. магнитное сопротивление участков магнитопровода пренебрежимо мало. Следовательно, магнитный поток по поперечной оси практически пропорционален намагничивающей силе , которая в вою очередь пропорциональна току и ЭДС вращения ротора. Но, так как ЭДС вращения прямо пропорциональна потоку Фq и скорости ротора  , то при отсутствии насыщения магнитной системы
, то при отсутствии насыщения магнитной системы
 (5.7.6)
(5.7.6)
Выходная характеристика асинхронного тахогенератора имеет вид (рис. 5.29):
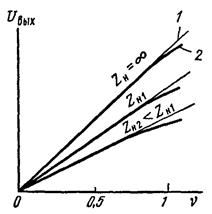
Рис. 5.29. Выходные характеристики асинхронного тахогенератора при различных величинах нагрузки.
Причинами, вызывающими отклонение выходной характеристики от линейной зависимости являются:
а) технологические неточности при изготовлении;
б) электромагнитная реакция ротора, изменяющая величины потоков и при изменении режима работы тахогенератора (скорости вращения и нагрузки);
в) изменение некоторых параметров тахогенератора при изменении скорости вращения (например, например сопротивление полого ротора);
г) изменение сопротивления обмоток и магнитного сопротивления машины по различным осям под влиянием температуры, насыщения и др.
Из-за технологических неточностей при изготовлении тахогенератора (отклонение обмоток В и Г от взаимного перпендикулярного положения, технологические неточности в величине воздушного зазора и толщине полого ротора) в выходной обмотке при скорости ротора, равной нулю, индуктируется некоторая остаточная ЭДС, называемая нулевым сигналом. Нулевой сигнал, обусловленный неточностью взаимного расположения обмоток В и Г, может быть уменьшен, если расположить обмотку возбуждения на внешнем статоре, а выходную обмотку – на внутреннем. Это дает возможность настроить тахогенератор на минимальный нулевой сигнал путем поворота внутреннего статора и установки его в такое положение, при котором остаточная ЭДС выходной обмотки будет минимальной. Другим способом уменьшения нулевого сигнала является включение обмоток статора по мостовой схеме (рис. 5.30).
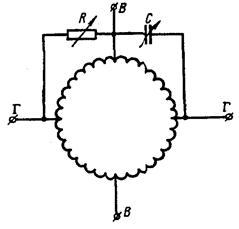
Рис. 5.30. Мостовая схема включения обмоток асинхронного тахогенератора с компенсирующими элементами.
В этом случае между зажимами В и Г включают компенсирующее устройство, состоящее из емкости C и активного сопротивления R, величины которых подбирают так, чтобы в выходной обмотке индуктировалась минимальная остаточная ЭДС. При настройке тахогенератора стремятся получить минимальный нулевой сигнал при различных положениях ротора.
В идеальном тахогенераторе величина продольного магнитного потока Фd остается неизменной во всех режимах работы машины. В действительности этот поток изменяется при изменении, как скорости вращения, так и тока нагрузки в выходной обмотке. Это происходит по следующим причинам. Под действием потока Фq в элементах полого ротора индуктируется ЭДС вращения и возникают токи , которые распределены относительно осей машины так же, как токи it , создаваемые трансформаторными ЭДС et . При этом в машине появляется добавочная продольная составляющая намагничивающей силы ротора Fd2 , изменяющая ток в обмотке возбуждения  . В результате изменяется ЭДС:
. В результате изменяется ЭДС:
 , (5.7.7)
, (5.7.7)
продольный поток

и ЭДС Е2 в выходной обмотке. Так как Фq пропорционален скорости вращения ротора, то ЭДС  , токи
, токи  и НС Fd2 будут пропорциональны уже квадрату этой скорости. Следовательно, они будут нелинейно уменьшать магнитный поток Фd и ЭДС ЕГ при увеличении скорости вращения.
и НС Fd2 будут пропорциональны уже квадрату этой скорости. Следовательно, они будут нелинейно уменьшать магнитный поток Фd и ЭДС ЕГ при увеличении скорости вращения.
При протекании тока нагрузки создается НС Fгq (рис. 5.31а).
В этом случае результирующая НС по поперечной оси  , т. е. она будет отличаться от НС
, т. е. она будет отличаться от НС  на холостом ходе. Кроме того, выходное напряжение тахогенератора под нагрузкой будет меньше, чем при холостом ходе, за счет падения напряжений
на холостом ходе. Кроме того, выходное напряжение тахогенератора под нагрузкой будет меньше, чем при холостом ходе, за счет падения напряжений  и
и  :
:
 (5.5.8)
(5.5.8)
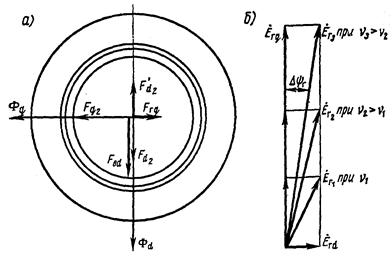
Рис. 5.31. Диаграмма пространственных векторов НС и потоков в асинхронном
тахогенераторе (а) и векторная диаграмма ЭДС, индуктированных в выходной
обмотке (б).
Из выражения для  и
и  следует, что погрешность, обусловленная изменением потока Фd и нагрузкой, будет тем большей, чем больше комплексные сопротивления обмоток статора
следует, что погрешность, обусловленная изменением потока Фd и нагрузкой, будет тем большей, чем больше комплексные сопротивления обмоток статора  и
и  .
.
Уравнение выходной характеристики тахогенератора Uвых = f (n) может быть получено путем разложения пульсирующего поля обмотки возбуждения на вращающиеся поля обратной и прямой последовательности:
 , (5.7.9)
, (5.7.9)
где
n - относительная скорость вращения ротора;
 и
и  – комплексные коэффициенты, зависящие от параметров схемы замещения тахогенератора.
– комплексные коэффициенты, зависящие от параметров схемы замещения тахогенератора.
Из этого выражения следует, что для уменьшения погрешности тахогенератора нужно уменьшать Вn2. С этой же целью тахогенераторы выбирают с большой синхронной скоростью, чтобы значение измеряемой скорости не превышало n=0,2….0,3; в связи, с чем они обычно выполняются на повышенную частоту питающей сети (400…500) Гц и с малым числом пар полюсов р.
Величина комплекса
 , (5.7.10)
, (5.7.10)
где
r2 – активное сопротивление ротора;
 – полное (приведенное) сопротивление обмотки статора.
– полное (приведенное) сопротивление обмотки статора.
Следовательно, при заданной нагрузке  уменьшение погрешности может быть достигнуто путем увеличения активного сопротивления ротора и уменьшения полного сопротивления статора Z1. Для этой цели в тахогенераторах полый ротор выполняют из материалов с большим удельным электрическим сопротивлением (фосфористая или марганцовистая бронза вместо алюминия) и соответственно увеличивают сечение проводов обмоток статора.
уменьшение погрешности может быть достигнуто путем увеличения активного сопротивления ротора и уменьшения полного сопротивления статора Z1. Для этой цели в тахогенераторах полый ротор выполняют из материалов с большим удельным электрическим сопротивлением (фосфористая или марганцовистая бронза вместо алюминия) и соответственно увеличивают сечение проводов обмоток статора.
Тахогенераторы большой точности работают при  . Поэтому у них уменьшение коэффициента В достигается за счет уменьшения отношения
. Поэтому у них уменьшение коэффициента В достигается за счет уменьшения отношения  . В идеальном тахогенераторе
. В идеальном тахогенераторе 
 . (5.7.11)
. (5.7.11)
Следовательно, амплитудная погрешность
 , (5.7.12)
, (5.7.12)
а ее относительное значение
 . (5.7.13)
. (5.7.13)
Фазовая погрешность:
 , (5.7.14)
, (5.7.14)
где
Yвых.U и Yвых – фазы выходного напряжения, имеющие место при отсутствии и наличии комплекса В.
Обычно ЭДС EГq , индуктируемая в выходной обмотке поперечным потоком Фq , изменяется приблизительно пропорционально скорости вращения n; ЭДС ЕГd , индуктируемая продольным потоком , изменяется весьма мало. Поэтому при уменьшении n возрастает как амплитудная, так и фазовая погрешности (рис. 5.31б).
Наименьшая амплитудная погрешность имеет место при емкостной нагрузке, наименьшая фазовая – при индуктивной нагрузке.
Для устранения температурной погрешности в тахогенераторах большой точности ротор выполняют из материалов с весьма низким температурным коэффициентом сопротивления или применяют специальную температурную компенсацию.
Основные технические показатели. К числу основных показателей относятся линейность характеристики, ее крутизна, остаточная ЭДС и статический момент трения. Полная погрешность тахогенераторов при максимальной рабочей скорости обычно составляет 0,1…2,5 %. В современных асинхронных тахогенераторах крутизна выходной характеристики лежит в пределах S=(1…10) мВ/(об/мин). Величина остаточной ЭДС E0 не превышает 0,1% от максимального значения выходного напряжения и составляет 25…100 мВ; переменная составляющая ее DЕ0= Е0max- Е0min , изменяющаяся при различных положениях ротора не превышает 7 мВ. Статический момент трения, т. е. минимальный момент, при котором начинается вращение ротора
Мст = (2…10)10-4 Нм (2…10 Гсм).
Максимальная рабочая скорость nmax достигает 8000…10000 об/мин; относительная скорость  .
.
Динамические свойства тахогенераторов. Дифференциальное уравнение тахогенератора:
 , (5.7.15)
, (5.7.15)
где
Т – постоянная времени;
Ky – статический коэффициент по напряжению;
- угол поворота вала;
Решение уравнения (5.5.13):
 , (5.7.16)
, (5.7.16)
где
 – установившееся значение угла поворота.
– установившееся значение угла поворота.
Передаточная функция тахогенератора:
 . (5.7.17)
. (5.7.17)
Из этого уравнения, очевидно, что тахогенератор представляет собой инерционное дифференцирующее звено. Постоянная времени Т определяется скоростью протекания электромагнитных процессов в машине, т. е. активными и реактивными сопротивлениями самой машины и ее нагрузки. Электромеханической постоянной времени, обусловленной инерцией полого ротора тахогенератора, обычно пренебрегают.
Литература
1. Костенко М П., Пиотровский Л. М. Электрические машины, Л, “Энергия”, 1973.
2. Вольдек А. И. Электрические машины, Л, “Энергия”, 1974.
3. Брускин Д. Э., Зорохович А. Е., Хвостов В. С. Электрические машины и микромашины, М, “Высшая школа”, 1990.
4. Пиотровский Л. М. Электрические машины, Л, “Госэнергоиздат ”, 1963.
5. Арменский Е. В., Прокофьев П.А., Фалк Г. Б. Автоматизириванный электропривод, М, “Высшая школа”, 1987.
Оглавление
1. Расчет магнитный цепей (общие сведения). . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1. Магнитные цепи c постоянной магнитодвижущей силой. . . . . . . . . . . . . 2
Расчет магнитной цепи постоянного магнита. . . . . . . . . . . . . . . . . . . . . . . 5
Механические усилия в магнитном поле. . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Магнитная цепь с переменной магнитодвижущей силой (МДС) . . . . . . . 8
1.5. Трансформаторы. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ..14
1.5.1. Основные соотношения для однофазного трансформатора................14
Холостой ход трансформатора. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
Режим нагрузки трансформатора. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Эквивалентная схема и параметры приведенного трансформатора. 18
Режим короткого замыкания трансформатора. . . . . . . . . . . . . . . . . . .19
1.5.6. Падение напряжения в трансформаторе и его КПД. . . . . . . . . . . . . . 20
Особенности работы трехфазных трансформаторов. . . . . . . . . . . . . .22
Автотрансформатор. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Измерительные трансформаторы. . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Машины переменного тока. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. .28
Получение кругового вращающегося магнитного поля . . . . . . . . . . . . . 28
2.3. Асинхронная электрическая машина. . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 2.3.1. Пуск в ход асинхронных…Регулирование скорости вращения асинхронных двигателей. . . . 44
2.4. Асинхронные исполнительные двигатели. . . . . . . . . . . . . . . . . . . . . . . . 45
Создание вращающегося магнитного поля. . . . . . . . . . . . . . . . . . . 46
Пульсирующее поле. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.4.3. Круговое поле.................................................................................... 47
Эллиптическое поле. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Требования, предъявляемые к исполнительным двигателям. . . 53
2.4.6. Исполнительный двигатель с амплитудным управлением. . . . . . 54
Уравнения токов идеализированного двигателя. . . . . . . . . . . 56
Механические характеристики. . . . . . . . . . . . . . . . . . . . . . . . . 57
Регулировочные характеристики. . . . . . . . . . . . . . . . . . . . .. 58
Мощности управления и возбуждения. . . . . . . . . . . . . . . . . 58
Механическая мощность. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
2.4.7. Исполнительный двигатель с фазовым управлением. . . . . . . . . . . 62
Механические и регулировочные характеристики
Идеализированного двигателя. . . . . . . . . . . . . . . . . . . . . . . . . . .63
Мощность управления. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
2.4.8. Исполнительный двигатель с амплитудно-фазовым управлением
(конденсаторная схема) . . . . . . . . . . . . . . . . . . . . . . . . . . ................65
Механические характеристики. . . . . . . . . . . . . . . . . . . . . . . . . . 66
2.4.9. Электромеханическая постоянная времени исполнительных
двигателей. ................................................................................... ....67
Сравнение исполнительных двигателей при различных
Методах управления. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.1. Общие сведения. . . . . . . . . .. . . .. . . . . . . . . . . . . . . . .. . . . .. . . . . . . . . . . 70 3.1.1. Векторные диаграммы синхронного генератора. . . . . . . . . . . . . . .… 3.1.2. Электромагнитный момент синхронной машины. . . . . . . . . . . .. . . 75– Конец работы –
Используемые теги: Магнитные, цепи, постоянной, магнитодвижущей, силой0.092
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Магнитные цепи с постоянной магнитодвижущей силой
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.237 сек.
Новости и инфо для студентов