Динамический, расчет плоской системы
Задание. Для плоской рамы (рис. 33), с выбранными по шифру из табл. 13 размерами и нагрузкой, и нагруженной неуравновешенным двигателем, полный вес которого Q, требуется:
а) определить собственную основную круговую частоту ω сек-1 симметричной формы вертикальных колебаний системы, приняв ее как имеющую одну степень свободы (собственный вес системы не учитывается);
б) определить θ сек-1 — круговую частоту возмущающей центробежной силы двигателя;
в) вычислить динамический коэффициент μ;
г) определить с учетом динамического воздействия нагрузки максимальные напряжения ±σ в сечении с наибольшим абсолютным значением изгибающего момента;
д) определить с учетом динамического воздействия прогиб fмакс в точке приложения нагрузки Q.
Вертикальная составляющая неуравновешенной центробежной силы Psinθt; частота вибрации двигателя θ сек-1=0,5ω, т. е. составляет половину собственной частоты колебания рамы.
Методические указания
Решению задачи должно предшествовать изучение второго раздела третьей части курса.
Пренебрегая собственным весом конструкции по сравнению с весом двигателя Q, основную круговую частоту со вертикальных симметричной формы собственных колебаний определяют, как и для системы с одной степенью свободы, по формуле 
где g - ускорение силы тяжести, равное 981 см/сек2;
 - прогиб в точке приложения статической нагрузки, равной по величине силе Q.
- прогиб в точке приложения статической нагрузки, равной по величине силе Q.
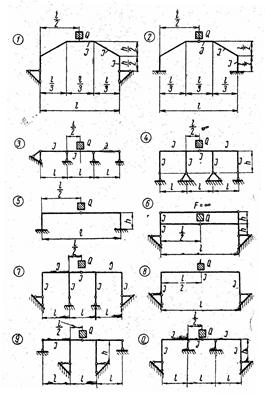
Рисунок – 33
Для определения (прогиба в статически неопределимой системе) надо сначала построить эпюру моментов одним из
Таблица 13
| Первая цифра шифра | l1 м | Q Т | Вторая цифра шифра | h м | P T | Последняя цифра шифра (№ схемы) | № схемы |
| 1,5 | |||||||
| 1,8 | |||||||
| 2,0 | |||||||
| 2,2 | |||||||
| 1,7 | |||||||
| 1,9 | |||||||
| 1,6 | |||||||
| 2,1 | |||||||
| 2,3 |
точных методов (методом сил или перемещений) от статического действия силы Q и затем, используя правило Верещагина, вычислить интеграл
где M1—-момент от силы Q=1, приложенной в направлении искомого перемещения;
MQ — момент от статического действия силы Q.
Эпюра M1 строится для основной системы метода сил. Если эпюра MQ тоже строилась методом сил, то для построения эпюры M1 можно воспользоваться уже имеющейся грузовой эпюрой, уменьшив вес ее ординаты в Q раз.
Для определения устQ следует предварительно отыскать в эпюре MQ сечение с наибольшим значением изгибающего момента MQмакс и подобрать номер стального двутаврового сечения, пользуясь формулой

где [σ]ст = 1600 кГ/см2. После этого подсчитывается жесткость EI (в килограммах на сантиметр в квадрате). Модуль упругости рекомендуется принять равным 2·106 кГ/см2.
Для соблюдения размерности, очевидно, надо все моменты выражать в килограмм-силах на сантиметр, а длины в сантиметрах.
Круговая частота θ сек-1 от неуравновешенной центробежной силы Psinθt находится по выражению θ≈0,5w
Динамический коэффициент вычисляется по формуле

В дополнение к эпюре MQ, построенной при определении устQ, необходимо также построить эпюру Мр от нагрузки неуравновешенной силой Р двигателя. Эта эпюра проще всего может быть построена при помощи эпюры MQ. путем умножения всех ее ординат на величину, равную отношению P:Q.
Далее на эпюрах Mq и Мр следует отыскать сечение, в котором значения изгибающих моментов достигают наибольших (по абсолютной величине) значений и определить MQмакс и МРмакс. Нормальное напряжение изгиба с учетом динамического воздействия неуравновешенной силы Psinθt двигателя находится по формуле
Заметим, что для повышения точности решения следует к полученному значению Максσдин добавить напряжение, вызванное нормальными силами. Для этого надо дополнительно построить эпюры NQ и NP.
Добавочное напряжение находится по формуле
где F — площадь сечения стержня.
Определение максимального прогиба fмакс в сечении под местом установки двигателя с учетом действия вибрационной нагрузки Psinθt производится по формуле

Оглавление.
Введение…………………………………………………………..……3
Общие методические указания…………………………………… .4
Литература………………………………………………………..........8
Методические указания к темам курса…………………………...…9
Введение и основные понятия……………………………………..…9
Часть I. Статически определимые системы………………………...13
Тема 1. Многопролетные статически определимые балки.
Общая теория линий влияния………………………………...…...13
Тема 2. Балочные и консольно-балочные плоские фермы……...17
Тема 3. Трехшарнирные системы…………………………………20
Тема 4. Арочные фермы и комбинированные системы ………...22
Тема 5. Теория перемещений…………………………………..….23
Часть II. Статически неопределимые системы………………….26
Тема 6. Метод сил……………………………………………….....26
Тема 7. Статически неопределимые арки……………………..….30
Тема 8 Неразрезные балки………………………………………...31
Тема 9. Статически неопределимые фермы……………………...33
Тема 10. Метод перемещений……………………………………..34
Тема 11. Смешанный метод. Комбинированный и приближенный
способы…………………………………………………………………….36
Тема 12. Пространственные системы…………………………...37
Тема 13. Расчет систем по несущей способности………………..39
Часть III.Устойчивость и динамика стержневых систем……….40
Раздел первый. Устойчивость стержневых систем………….40
Раздел второй. Основы динамики стержневых систем…………………………………………………..……………..42
ЧастьIV. Основы расчета пространственных тонкостенных систем…. ……………………………………………………………...44
Контрольные работы………………………………………………..44
Общие указания о порядке выполнения контрольных работ……………………………………………………………………..…44
Задачи………………………………………………………………….47