рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Федеральное агенТство по образованию
Реферат Курсовая Конспект
Федеральное агенТство по образованию
Федеральное агенТство по образованию - раздел Механика, Федеральное Агентство По Образованию Государственное Образовательное...
Федеральное агенТство по образованию
Государственное образовательное учреждение
высшего профессионального образования
«Курский государственный технический университет»
В.М. Полунин, О.В. Лобова, Г.Т. Сычев
Физические основы механики. Молекулярная физика и термодинамика
Сборник тестовых заданий Утверждено Учебно-методическим советом университетаПолунин В.М.
Содержит тестовые задания, которые позволят оценить знания студентами основных… Составлен в соответствии с требованиями ГОС-2000, Примерной программы дисциплины «Физика» (2000 г.) и рабочей…ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ.......................................................................................... 4
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К ТЕСТОВЫМ ЗАДАНИЯМ
ДЛЯ ПРОВЕРКИ КАЧЕСТВА ЗНАНИЙ ПО ФИЗИКЕ............................ 5
1. ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ............................................... 8
1.1. Основные понятия, определения и законы
классической кинематики......................................................................... 8
1.2. Основные понятия, определения и законы
классической динамики.......................................................................... 49
1.3. Энергия, работа, мощность. Законы сохранения.......................... 87
1.4. Поле тяготения. Движение в поле центральных сил................... 101
1.5. Волновые процессы...................................................................... 105
1.6. Элементы механики жидкостей и газов....................................... 112
1.7. Основы релятивистской механики............................................... 126
2. ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ
И ТЕРМОДИНАМИКИ........................................................................... 137
2.1. Основные понятия молекулярной физики
и термодинамики.................................................................................. 137
2.2. Основные представления и законы
молекулярно-кинетической теории..................................................... 145
2.3. Основные положения и законы термодинамики......................... 164
2.4. Реальные газы. Фазовые равновесия и превращения................. 185
2.5. Кинетические явления (явления переноса)................................... 198
ЗАКЛЮЧЕНИЕ........................................................................................ 204
БИБЛИОГРАФИЧЕСКИЙ СПИСОК..................................................... 205
ПРИЛОЖЕНИЕ 1. Физические основы механики. Основные
понятия, определения и законы............................................................... 206
ПРИЛОЖЕНИЕ 2. Основы молекулярной физики
и термодинамики. Основные понятия, определения и законы............... 251
ПРИЛОЖЕНИЕ 3. Физические величины.............................................. 279
ПРИЛОЖЕНИЕ 4. Правильные ответы на тестовые задания................ 283
Предисловие
Учебный процесс не может осуществляться без надежной обратной связи, что реализуется контролем за ходом учебного процесса и его результатами. Контроль за ходом учебного процесса является многофакторным и требует получения достоверных данных, необходимых для принятия правильных решений по управлению учебным процессом.
Для обеспечения достоверности результатов контроля требуется соблюдение условий его идентичности (единые задания, единые критерии оценки, единые требования, единое время контроля и т.п.); его объективность, комплексная оценка качества учебной работы студентов при освоении ими требований ГОС и рабочей программы.
Все вышеизложенное предусматривалось при создании данного сборника, который состоит из тестовых заданий по разделам:
1. «Физические основы механики» («Кинематика и динамика», «Энергия, работа, мощность», «Законы сохранения в механике», «Поле тяготения», «Движение в поле центральных сил», «Волновые процессы», «Элементы механики жидкостей и газов», «Элементы специальной теории относительности»).
2. «Молекулярная физика и термодинамика» («Основные понятия молекулярной физики и термодинамики», «Основные представления и законы молекулярно-кинетической теории», «Основные положения и законы термодинамики», «Реальные газы», «Фазовые равновесия и превращения», «Кинетические явления (явления переноса)»).
Большинство заданий, приведенных в сборнике тестовых заданий, составлено авторами с учётом рабочей программы по физике и минимума содержания рабочих программ, вытекающего из ГОСов для студентов технических специальностей.
Предполагается, что, работая с этой книгой, студенты (молодые преподаватели) будут пользоваться не только им, но и задачниками (учебными пособиями, справочниками по физике), в которых они найдут необходимый теоретический и справочный материал.
Пояснительная записка к тестовым заданиям для проверки качества знаний по физике
Требования к знаниям, навыкам и умениям
Студент должен знать и уметь использовать основные понятия, законы и модели механики, электричества и магнетизма, колебаний и волн, статистической физики и термодинамики; оптики, атомной и ядерной физики; методы теоретического и экспериментального исследования в физике, уметь оценивать численные порядки величин, характерных для различных разделов естествознания.
Обоснование выбора объектов тестового задания
Тестовые задания, вошедшие в сборник, являются одними из существенных в физике. Умение их правильно решать выявляет глубину и прочность навыков, необходимых инженерам в процессе их дальнейшей деятельности.
Обоснование выбора вида работы
Письменное тестовое задание по физике позволяет выяснить знания студентов инженерно-технических специальностей основных понятий, законов и формул, выявить индивидуальное умение каждого студента применять полученные теоретические знания к решению практических задач, уровень их физической подготовки.
Критерии оценки
Каждому студенту предлагается выполнить письменное тестовое задание (персональный вариант), состоящее из 20 типовых вопросов по основным разделам физики.
Задание считается выполненным правильно, если полученный студентом в ходе его решения ответ полностью соответствует одному из приведенных.
За каждую правильно выполненное задание студент получает 5 баллов. Максимальное число баллов за тестовое задание – 100.
Рекомендации по режиму выполнения тестового задания
Тестовое задание (комплексная письменная работа) выполняется студентами в аудитории в течение двух академических часов, на бумаге со штампом деканата, в присутствии преподавателя. Использование справочной литературы не допускается.
Обязательный минимум содержания программы (ГОС-2000)
Программа содержит:
1) физические основы механики: понятие состояния и описание движения в классической механике, принцип относительности в механике, уравнения движения, законы сохранения, инерциальные и неинерциальные системы отсчета, кинематика и динамика твердого тела, жидкостей и газов, основы релятивистской механики;
2) физику колебаний и волн: кинематика и динамика колебательных движений (гармонический и ангармонический осциллятор, гармонические, затухающие и вынужденные колебания); кинематика и динамика волновых процессов; описание плоских звуковых волн; нормальные моды; энергетические характеристики волн; интерференция и дифракция волн; дисперсия; когерентность; физический смысл спектрального разложения.
3) элементы механики сплошных сред; порядок и беспорядок в природе: общие свойства жидкостей и газов; кинематическое описание движения жидкости; идеальная и вязкая жидкости; гидростатика несжимаемой жидкости; стационарное движение идеальной жидкости; уравнение Бернулли; гидродинамика вязкой жидкости; силы внутреннего трения; коэффициент вязкости; стационарное течение вязкой жидкости; уравнение неразрывности; формула Пуазейля; формула Стокса; кинематика и динамика газов; идеально упругое тело; упругие деформации и напряжения; закон Гука; пластические деформации; предел прочности;
4) молекулярную физику и термодинамику; молекулярно-кинетическую теорию строения вещества: динамические и статистические закономерности в физике; статистический и термодинамический методы исследования; макроскопическое состояние; термодинамические функции состояния; уравнение состояния; внутренняя энергия; интенсивные и экстенсивные параметры; модель идеального газа; основное уравнение состояния идеального газа; основные газовые законы; молекулярно-кинетиче-ский смысл абсолютной температуры;
5) термодинамические функции состояния; функции распределения; классическую и квантовую статистику; статистические распределения: микроскопические параметры; вероятность и флюктуации; распределение молекул (частиц) по абсолютным значениям скорости; распределение Максвелла; средняя кинетическая энергия частицы; скорости теплового движения частиц; распределение Больцмана; теплоемкость многоатомных газов; ограниченность классической теории теплоемкостей; статистический смысл термодинамических потенциалов и температуры; роль свободной энергии; распределение Гиббса для системы с переменным числом частиц; принцип Нернста и его следствия;
6) элементы термодинамики: обратимые, необратимые и круговые тепловые процессы; первое начало термодинамики и его применение к изопроцессам в идеальных газах; цикл Карно; максимальный КПД тепловой машины; энтропия системы и её свойства; определение изменения энтропии системы; второе начало термодинамики; термодинамические потенциалы и условия равновесия; химический потенциал; третье начало термодинамики; применения термодинамики;
7) элементы неравновесной термодинамики: термодинамика неравновесных процессов; закон сохранения массы в термодинамике неравновесных процессов; закон сохранения импульса в термодинамике неравновесных процессов; закон сохранения энергии в термодинамике неравновесных процессов;
8) реальные газы. Фазовые равновесия и превращения: реальные газы; уравнение Ван-дер-Ваальса; изотермы Ван-дер-Ваальса и реальных газов; фазы и фазовые превращения; условия равновесия фаз; уравнение Клапейрона-Клаузиуса; фазовые диаграммы; метастабильные состояния; критическая точка; тройная точка; фазовые переходы 1-го и 2-го рода;
9) кинетические явления (явления переноса): понятие о физической кинетике; диффузия, теплопроводность в газах, жидкостях и твердых телах; коэффициенты диффузии и теплопроводности; вязкость жидкостей и газов; коэффициент вязкости жидкостей и газов; динамическая и кинематическая вязкости.
Физические основы механики
Основные понятия, определения и законы классической кинематики
1. Механика – это раздел физики, в котором изучается:
а) механическое движение без причин, вызывающих это движение, и происходящие при этом взаимодействия между телами;
б) механическое движение, причины, вызывающие это движение, без происходящих при этом взаимодействий между телами;
в) механическое движение, причины, вызывающие это движение, и происходящие при этом взаимодействия между телами.
2. Механическое движение – это:
а) изменение с течением времени механических свойств тел или их частей (частиц) в пространстве;
б) процесс изменения положения физических тел или их частей по отношению к другим телам или частям одного и того же тела в пространстве и во времени;
в) изменение с течением времени положения данного тела или его частей относительно других тел (или их частей);
г)простейшая форма движения материи, которая состоит в перемещении тел или их частей друг относительно друга.
3. Кинематика – это раздел механики, в котором изучают:
а) геометрические свойства движения и взаимодействия тел в не связи с причинами их порождающими;
б) механические движения тел во времени и не рассматривают какие-либо воздействия на эти тела других тел или полей;
в) геометрические свойства движения и взаимодействия тел совместно с причинами их порождающими;
г) механические движения тел во времени и рассматривают какие-либо воздействия на эти тела других тел или полей.
4. Динамика изучает:
а) механические движения тел во времени и рассматривает какие-либо воздействия на эти тела других тел или полей;
б) механические движения тел во времени и рассматривает какие-либо воздействия на эти тела других тел или полей;
в) движение и взаимодействия тел совместно с причинами, обусловливающими тот или иной характер движения и взаимодействия;
г) геометрические свойства движения и взаимодействия тел в не связи с причинами их порождающими.
5. Статика изучает:
а) свойства материальных точек, тел, систем;
б) равновесие материальных точек, тел и систем;
в) материальные точки, тела и системы.
6. Материальная точка – это:
а) протяженное тело, размерами которого в условиях данной задачи можно пренебречь;
б) протяженное тело, обладающее массой;
в) протяженное тело, обладающее массой, размерами которого в условиях данной задачи можно пренебречь;
г) объект, размерами которого в условиях данной задачи можно пренебречь, обладающий массой.
7. Понятие «Материальная точка» применимо:
а) при поступательном движении;
б) при любом движении;
в) когда в изучаемом движении можно пренебречь вращением тела вокруг его центра масс;
г) когда в изучаемом движении нельзя пренебречь вращением тела вокруг его центра масс.
8. Абсолютно твердое тело – это:
а) тело, расстояние между двумя любыми точками которого в процессе движения изменяется;
б) тело, расстояние между двумя любыми точками которого в процессе движения остается неизменным;
в) тело, расстояние между двумя любыми точками которого остается неизменным.
9. Понятие «Абсолютно твердое тело» применимо:
а) к телам, деформация которых затруднена;
б) когда можно пренебречь деформацией тела в общем случае;
в) когда можно пренебречь деформацией тела в условиях данной задачи.
10. Понятие «Сплошная изменяемая среда» применимо при изучении движения:
а) деформируемого твердого тела;
б) жидкости и газа;
в) когда можно пренебречь молекулярной структурой среды.
11. При изучении сплошных сред вводят такие абстракции, которые отражают при данных условиях наиболее существенные свойства реальных тел. К понятию «Сплошная изменяемая среда» относят:
а) идеально упругое тело, пластичное тело;
б) идеальная жидкость, вязкая жидкость;
в) идеальный газ, реальный газ.
12. Пространство и время – категории, обозначающие основные формы существования и взаимодействия объектов. Пространство выражает порядок существования объектов. Время – порядок смены событий. К метрическим свойствам пространства и времени относят:
а) размерность;
б) протяженность и длительность;
в) непрерывность и связанность;
г) порядок и направление времени.
13. Пространство и время – категории, обозначающие основные формы существования и взаимодействия объектов. Пространство выражает порядок существования объектов. Время – порядок смены событий. К топологическим свойствам пространства и времени относят:
а) размерность;
б) протяженность и длительность;
в) непрерывность и связанность;
г) порядок и направление времени.
14. Система единиц измерения физических величин – это:
а) совокупность основных и производных;
б) совокупность основных и дополнительных эталонов;
в) совокупность основных, производных и дополнительных эталонов;
г) совокупность производных и дополнительных эталонов.
15. В системе СИ основными единицами измерения являются:
а) единица измерения силы тока (I) – 1 А (ампер); единица измерения силы света (I) – 1 св. (свеча);
б) единица измерения длины (L) – 1 м (метр); единица измерения массы (M) – 1 кг (килограмм);
в) единица измерения времени (T) – 1 с (секунда); единица измерения температуры (Т) – 1 К (градус по шкале Кельвина);
г) единица измерения плоского угла – 1 рад (радиан); единица измерения телесного угла – 1 стерад (стерадиан).
16. В системе СИ дополнительными единицами измерения являются:
а) единица измерения силы тока (I) – 1 А (ампер); единица измерения силы света (I) – 1 св. (свеча);
б) единица измерения длины (L) – 1 м (метр); единица измерения массы (M) – 1 кг (килограмм);
в) единица измерения времени (T) – 1 с (секунда); единица измерения температуры (Т) – 1 К (градус по шкале Кельвина);
г) единица измерения плоского угла – 1 рад (радиан); единица измерения телесного угла – 1 стерад (стерадиан).
17. Телом отсчета называют:
а) произвольно выбранное, условно неподвижное тело, по отношению к которому рассматривается движение данного тела;
б) произвольно выбранное тело, по отношению к которому рассматривается движение данного тела;
в) любое, условно неподвижное тело, по отношению к которому рассматривается движение других тел.
18. Система отсчета:
а) фиксированная, условно неподвижная, прямоугольная, трехмерная система координат, связанная с телом отсчёта;
б) произвольно выбранная, условно неподвижная, прямоугольная, трехмерная система координат, связанная с телом отсчёта;
в) любая, произвольная, условно неподвижная, прямоугольная, трехмерная система координат, не связанная с телом отсчёта.
19. Части движущегося автомобиля, которые находятся в покое относительно дороги:
а) все точки колёс;
б) все точки осей колёс;
в) точки колёс, соприкасающиеся в данное мгновение с дорогой;
г) точки колёс, соприкасающиеся в данное мгновение с осями колёс.
20. Части движущегося автомобиля, которые движутся относительно кузова автомобиля:
а) все точки колёс;
б) все точки осей колёс;
в) точки колёс, соприкасающиеся в данное мгновение с дорогой;
г) точки колёс, соприкасающиеся в данное мгновение с осями колёс.
21. Полярная система отсчета – это:
а) любая, произвольно выбранная, условно неподвижная система координат, положение материальной точки (тела) в которой задается радиус-вектором  и углами j и q, не связанная с телом отсчёта;
и углами j и q, не связанная с телом отсчёта;
б) фиксированная, условно неподвижная система координат, положение материальной точки (тела) в которой задается радиус-вектором и углами j и q, связанная с телом отсчёта;
в) произвольно выбранная, условно неподвижная, система координат, положение материальной точки (тела) в которой задается радиус-вектором и углами j и q, связанная с телом отсчёта.
22. Траектория движения – это:
а) линия, которую описывает конец радиус-вектора в пространстве;
б) совокупность последовательных положений материальной точки (тела) в процессе ее движения;
в) линии, которые описывают различные точки тела конечных размеров при его движении;
д) среди приведённых ответов правильного ответа нет.
23. Траектория движения точек винта самолёта по отношению к лётчику – это:
а) прямая линия;
б) эллипс;
в) окружность;
г) винтовая линия.
24. Траектория движения точек винта самолёта по отношению к Земле – это:
а) прямая линия;
б) эллипс;
в) окружноть;
г) винтовая линия.
25. Траектория движения шарика, пущенного из центра горизонтально расположенного вращающегося диска по его поверхности, относительно Земли – это:
а) прямая линия;
б) эллипс;
в) окружноть;
г) спиральная линия.
26. Траектория движения шарика, пущенного из центра горизонтально расположенного вращающегося диска по его поверхности, относительно диска – это:
а) прямая линия;
б) эллипс;
в) окружноть;
г) спиральная линия.
27. Положение материальной точки (тела) в трехмерной, прямоугольной системе отсчета в данный момент времени может быть определено:
а) с помощью координат x, y, z – M(x,y,z);
б) с помощью радиус-вектора ;
в) естественным (траекторным) способом;
г) среди приведённых ответов правильного ответа нет.
28. Уравнения движения материальной точки (тела) в кинематике имеют следующий вид:
а) rx = x, ry = y, rz = z;
б) x = f1(t); y = f2(t); z = f3(t);
в) rx = f1(t); ry = f2 (t); rz = f3(t);
г)  , где x, y, z – координаты; rx, ry, rz – проекции радиуса вектора на соответствующие оси координат.
, где x, y, z – координаты; rx, ry, rz – проекции радиуса вектора на соответствующие оси координат.
29. Уравнение движения материальной точки имеет вид  . По какой траектории движется данная материальная точка?
. По какой траектории движется данная материальная точка?
а) по эллипсу;
б) по окружности;
в) по прямой;
г) по параболе;
д) по гиберболе.
30. Уравнение движения материальной точки имеет вид x2 + y2 = a2. По какой траектории движется данная материальная точка?
а) по эллипсу;
б) по окружности;
в) по прямой;
г) по параболе.
д) по гиберболе.
31. Уравнение движения материальной точки имеет вид  . По какой траектории движется данная материальная точка?
. По какой траектории движется данная материальная точка?
а) по эллипсу;
б) по окружности;
в) по прямой;
г) по параболе;
д) по гиберболе.
32. Уравнение движения материальной точки имеет вид 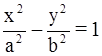 . По какой траектории движется данная материальная точка?
. По какой траектории движется данная материальная точка?
а) по эллипсу;
б) по окружности;
в) по прямой;
г) по параболе.
д) по гиберболе.
33. Уравнение движения материальной точки имеет вид y = = kx – bx2. По какой траектории движется данная материальная точка?
а) по эллипсу;
б) по окружности;
в) по прямой;
г) по параболе.
д) по гиберболе.
34. Поступательное движение – это движение, при котором:
а) любая прямая, соединяющая две произвольные точки тела, перемещается, оставаясь параллельной самой себе;
б) тело перемещается параллельно самому себе;
в) все точки тела описывают одинаковые траектории, смещенные относительно друг друга;
г) среди приведённых ответов правильного ответа нет.
35. Перемещение – это:
а) приращение радиус-вектора за рассматриваемый промежуток времени  ;
;
б) вектор , проведенный из начального положения материальной точки (тела) в положение этой точки в данный момент времени;
в) вектор , проведенный из начала отсчёта в положение материальной точки (тела) в данный момент времени;
г) среди приведённых ответов правильного ответа нет.
36. Элементарное перемещение  – это:
– это:
а) бесконечно малое перемещение;
б) бесконечно малое перемещение, которое с достаточной степенью точности совпадает с соответствующим участком траектории движения;
в) бесконечно малое перемещение, которое не совпадает с соответствующим участком траектории движения;
г) среди приведённых ответов правильного ответа нет.
37. Путь – это:
а) расстояние между начальным и конечным положениями материальой точки (тела);
б) расстояние, пройденное материальной точкой (телом) при движении по траектории;
в) модуль перемещения;
г) среди приведённых ответов правильного ответа нет.
38. Расстояние – это:
а) расстояние между начальным и конечным положениями материальой точки (тела);
б) расстояние, пройденное материальной точкой (телом) при движении по траектории;
в) модуль перемещения;
г) среди приведённых ответов правильного ответа нет.
39. Перемещение какой-либо точки, находящейся на краю диска радиусом R, в системе отсчёта, связанной с подставкой, на которой расположен диск, при его повороте на угол φ = 60º, равно:
а) 0;
б) R;
в) 2R;
г) 3R.
40. Перемещение какой-либо точки, находящейся на краю диска радиусом R, в системе отсчёта, связанной с подставкой, на которой расположен диск, при его повороте на угол φ = 180º, равно:
а) 0;
б) R;
в) 2R;
г) 3R.
41. Перемещение какой-либо точки, находящейся на краю диска радиусом R, в системе отсчёта, связанной с диском, при его повороте на угол φ = 60º, равно:
а) 0;
б) R;
в) 2R;
г) 3R.
42. Перемещение какой-либо точки, находящейся на краю диска радиусом R, в системе отсчёта, связанной с диском, при его повороте на угол φ = 180º, равно:
а) 0;
б) R;
в) 2R;
г) 3R.
43. Мгновенная линейная скорость – это:
а) векторная физическая величина, характеризующая состояние движения;
б) векторная физическая величина, показывающая, как изменяется перемещение в единицу времени;
в) векторная физическая величина, равная первой производной от перемещения по времени;
г) векторная физическая величина, численно равная отношению всего пути, пройденного телом (материальной точкой), к тому промежутку времени, в течение которого совершалось движение.
44. Средняя скорость неравномерного движения – это:
а) векторная физическая величина, численно равная отношению всего пути, пройденного телом (материальной точкой), к тому промежутку времени, в течение которого совершалось движение;
б) скалярная физическая величина, численно равная отношению всего пути, пройденного телом (материальной точкой), к тому промежутку времени, в течение которого совершалось движение;
в) векторная физическая величина, характеризующая состояние движения;
г) векторная физическая величина, показывающая, как изменяется перемещение в единицу времени.
45. Равномерному движению соответствует соотношение:
а) s = 2t + 3;
б) s = 5t2;
в) s = 3t;
г) v = 4 – t;
д) v = 7.
46. Линейное ускорение – это:
а) векторная физическая величина, равная первой производной от скорости по времени;
б) скалярная физическая величина, характеризующая изменение скорости в единицу времени;
в) векторная физическая величина, характеризующая изменение скорости в единицу времени;
г) векторная физическая величина, равная второй производной от перемещения по времени.
47. Тангенциальное ускорение:
а) изменяет линейную скорость только по величине;
б) это составляющая ускорения, направленная по касательной к траектории движения;
в) изменяет линейную скорость по величине и направлению;
г) изменяет линейную скорость только по направлению.
48. Нормальное ускорение – это:
а) составляющая линейного ускорения, направленная по нормали к вектору линейной скорости;
б) составляющая линейного ускорения, изменяющая линейную скорость по величине и направлению;
в) составляющая линейного ускорения, изменяющая линейную скорость только по направлению;
г) составляющая линейного ускорения, изменяющая линейную скорость только по величине.
49. Связь между тангенциальным, нормальным и полным ускорениями отображает формула:
а)  ;
;
б)  ;
;
в)  .
.
50. Если при движении материальной точки (тела) тангенциальное и нормальное ускорения равны нулю, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное прямолинейное;
в) прямолинейное неравномерное;
г) криволинейное с постоянной скоростью.
51. Если при движении материальной точки (тела) тангенциальное ускорение не равно нулю, а нормальное ускорение равно нулю, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное прямолинейное;
в) прямолинейное неравномерное;
г) криволинейное с постоянной скоростью.
52. Если при движении материальной точки (тела) тангенциальное ускорение не равно нулю, а нормальное ускорение равно нулю, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное прямолинейное;
в) прямолинейное неравномерное;
г) криволинейное с постоянной скоростью.
53. Если при движении материальной точки (тела) тангенциальное ускорение равно нулю, а нормальное ускорение не равно нулю, материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное прямолинейное;
в) прямолинейное неравномерное;
г) криволинейное с постоянной скоростью.
54. Если при движении материальной точки (тела) тангенциальное ускорение равно нулю, нормальное ускорение является величиной постоянной, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное, по окружности;
в) прямолинейное неравномерное;
г) криволинейное с постоянной скоростью.
55. Если при движении материальной точки (тела) тангенциальное и нормальное ускорения являются постоянными величинами, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное, по окружности;
в) равнопеременное, по окружности;
г) криволинейное с постоянной скоростью.
56. Если при движении материальной точки (тела) тангенциальное и нормальное ускорения зависят от времени, то материальная точка (тело) совершает движение:
а) равнопеременное прямолинейное;
б) равномерное, по окружности;
в) равнопеременное, по окружности;
г) неравномерное криволинейное.
57. В общем случае путь, пройденный материальной точкой (телом) при неравномерном движении за промежуток времени от t1 до t2, можно определить по формуле:
а) dS = v · dt;
б)  ;
;
в)  .
.
58. Три тела движутся равномерно и прямолинейно. На рисунке 1 представлены графики зависимости их координат от времени. Какая из прямых графика завиcимости пути от времени, представленного на рисунке 2, соответствует телу I?
| а) 1; б) 2; в) 3. | 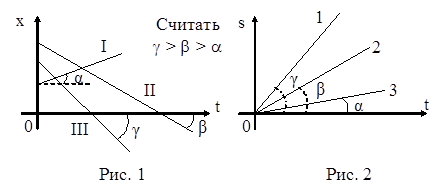
|
59. Три тела движутся равномерно и прямолинейно. На рисунке 1 представлены графики зависимости их координат от времени. Какая из прямых графика завиcимости пути от времени, представленного на рисунке 2, соответствует телу II?
| а) 1; б) 2; в) 3. | 
|
60. Три тела движутся равномерно и прямолинейно. На рисунке 1 представлены графики зависимости их координат от времени. Какая из прямых графика зависимости пути от времени, представленного на рисунке 2, соответствует телу III?
| а) 1; б) 2; в) 3. | 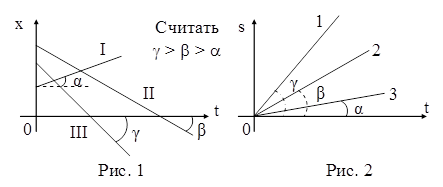
|
61. На рисунке 1 представлены графики пути трёх тел. Как движется первое тело?
| а) равномерно; б) равноускоренно; в) равнозамедленно. | 
|
62. На рисунке 1 представлены графики пути трёх тел. Как движется второе тело?
| а) равномерно; б) равноускоренно; в) равнозамедленно. |
|
63. На рисунке 1 представлены графики пути трёх тел. Как движется третье тело?
| а) равномерно; б) равноускоренно; в) равнозамедленно. |
|
64. На рисунке 1 представлены графики пути трёх тел. Скорость какого тела, из этих трёх тел, наибольшая?
| а) 1; б) 2; в) 3. |
|
65. На рисунке 1 представлен график пути автомобиля. На каком из участков автомобиль находился в движении?
| а) 1; б) 2; в) 3. | 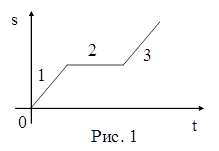
|
66. На рисунке 1 представлен график пути автомобиля. На каком из участков автомобиль находился в покое?
| а) 1; б) 2; в) 3. |
|
67. На рисунке 1 представлен график пути автомобиля. На каком из участков скорость автомобиля была наибольшей?
| а) 1; б) 2; в) 3. г) среди приведенных ответов правильного нет. |
|
68. На рисунке 1 представлен график пути автомобиля. На каком из участков скорость автомобиля была наибольшей?
| а) 1; б) 2; в) 3. |
|
69. На улицах городов и на автотрассах вывешивают знаки, запрещающие движение со скоростью, превышающей величину скорости, указанную на знаке. Какая скорость имеется в виду?
а) мгновенная и средняя;
б) средняя;
в) мгновенная.
70. На улицах городов и на автотрассах вывешивают знаки, запрещающие движение со скоростью, превышающей величину скорости, указанную на знаке. Правильно ли в этом случае указана размерность скорости?
а) да;
б) нет;
в) среди приведенных ответов правильного нет.
71. Токарь обрабатывает деталь со скоростью 2500 м/мин. О какой скорости идет речь в этом случае?
а) о мгновенной;
б) о средней;
в) о мгновенной и средней;
г) среди приведенных ответов правильного нет.
72. Автомобиль прошёл расстояние от одного города до другого города со скоростью 60 км/ч. О какой скорости идет речь в этом случае?
а) о мгновенной;
б) о средней;
в) о мгновенной и средней;
г) среди приведенных ответов правильного нет.
73. Скорость шарика в момент удара о преграду равна 20 м/с. О какой скорости идет речь в этом случае?
а) о мгновенной;
б) о средней;
в) о мгновенной и средней;
г) среди приведенных ответов правильного нет.
74. Скорость удара молотка по гвоздю равна 5 м/с. О какой скорости идет речь в этом случае?
а) о мгновенной;
б) о средней;
в) о мгновенной и средней;
г) среди приведенных ответов правильного нет.
75. На рисунке 1 представлен график зависимости ускорения автомобиля от времени. Как движется автомобиль в этом случае?
| а) с постоянной скоростью; б) равноускоренно; в) равнозамедленно; г) ускоренно с равномерно возрастающим ускорением. | 
|
76. На рисунке 1 представлен график зависимости ускорения автомобиля от времени. Как движется автомобиль в этом случае?
| а) с постоянной скоростью; б) равноускоренно; в) равнозамедленно; г) ускоренно с равномерно возрастающим ускорением. | 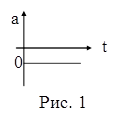
|
77. На рисунке 1 представлен график зависимости ускорения автомобиля от времени. Как движется автомобиль в этом случае?
| а) с постоянной скоростью; б) равноускоренно; в) равнозамедленно; г) ускоренно с равномерно возрастающим ускорением. | 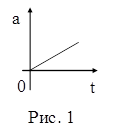
|
78. На рисунке 1 представлен график зависимости ускорения автомобиля от времени. Как движется автомобиль в этом случае?
| а) с постоянной скоростью; б) равноускоренно; в) равнозамедленно; г) ускоренно с равномерно убывающим ускорением. | 
|
79. Зависимости пути и скорости движения автомобиля могут быть представлены в виде некоторых функций времени. Какие из приведенных зависимостей описывают равнопеременное движение?
а) v = 3 + 2t;
б) s = 3 + 2t;
в) s = 3t2;
г) s = 2t – t2;
д) s = 2 – 3t + 5t2.
80. Скорость автомобиля изменяется согласно уравнению v = 5 + 4t. Уравнение зависмости пути от времени в этом случае будет иметь вид:
а) s = 5t + 2t2;
б) s = s0 + 2t2;
в) s = 2t2;
г) s = s0 + 5t + 2t2.
81. Известно, что в некоторых случаях зависимость пути, пройденного автомобилем при равноускоренном и прямолинейном движении за некоторый промежуток времени, можно определить по формуле  . При какой скорости или при каком ускорении путь, пройденный автомобилем за первую секунду своего движения, не будет равен половине его ускорения?
. При какой скорости или при каком ускорении путь, пройденный автомобилем за первую секунду своего движения, не будет равен половине его ускорения?
а) a ≠ const;
б) a = const;
в) v0 ≠ const;
г) v0 = 0;
д) v0 ≠ 0.
82. Известно, что в некоторых случаях зависимость пути, пройденного автомобилем при равноускоренном и прямолинейном движении за некоторый промежуток времени, можно определить по формуле . В каком случае путь, пройденный автомобилем за первую секунду своего движении, будет равен половине его ускорения?
а) a ≠ const;
б) a = const;
в) v0 ≠ const;
г) v0 = 0;
д) v0 ≠ 0.
83. Вращательное движение твердого тела вокруг неподвижной оси вращения – это движение, при котором:
а) все точки твердого тела описывают окружности в плоскостях, перпендикулярных к оси вращения, центры которых лежат на этой оси;
б) какие-либо две его точки остаются неподвижными в процессе движения, все остальные точки твердого тела описывают окружности в плоскостях, перпендикулярных к оси вращения, центры которых лежат на этой оси;
в) какие-либо две его точки остаются неподвижными в процессе движения;
г) все точки твердого тела описывают окружности в произвольных плоскостях.
84. Угол поворота – это:
а) угол, отсчитанный между двумя последовательными положениями радиуса R;
б) угол между проведенными через ось вращения неподвижной полуплоскостью (плоскостью отсчета) и полуплоскостью, жестко связанной с телом и вращающейся вместе с ним;
в) псевдовектор – вектор, численно равный углу между двумя положениями радиуса R, направленный вдоль оси вращения и связанный с направлением вращения правилом векторного произведения;
г) псевдовектор, численно равный углу, отсчитанному между двумя последовательными положениями радиус-вектора , и связанный с направлением вращения правилом правого винта.
85. Угловая скорость ( ) – это:
) – это:
а) векторная физическая величина, показывающая, как изменяется угол поворота в единицу времени;
б) векторная физическая величина, численно равная первой производной от угла поворота по времени;
в) скалярная физическая величина, численно равная первой производной от угла поворота по времени;
г) векторная физическая величина, направленная вдоль оси вращения в сторону, определяемую правилом левого винта (правилом векторного умножения).
86. Угловое ускорение ( ) – это:
) – это:
а) скалярная физическая величина, характеризующая изменение угловой скорости в единицу времени;
б) векторная физическая величина, характеризующая изменение угловой скорости в единицу времени;
в) скалярная физическая величина, численно равная первой производной от угловой скорости по времени или второй производной от угла поворота по времени;
г) векторная физическая величина, численно равная первой производной от угловой скорости по времени или второй производной от угла поворота по времени.
87. Направление вектора углового ускорения:
а) всегда совпадает с направлением вектора угловой скорости;
б) совпадает с направлением вектора угловой скорости в случае ускоренного вращения;
в) противоположно – в случае замедленного вращения.
88. Период вращения (T) – это:
а) время, в течение которого тело совершает один полный оборот;
б) время, в течение которого тело совершает несколько полных оборотов;
в) время, в течение которого тело совершает 2π полных оборотов.
89. Частота вращения (ν) – это:
а) число оборотов, совершаемых за 1 с;
б) число оборотов, совершаемых за время равное 2π;
в) число оборотов, совершаемых в единицу времени.
90. Круговая (циклическая) частота (ω) – это:
а) число оборотов, совершаемых за 1 с;
б) число оборотов, совершаемых за время равное 2π;
в) число оборотов, совершаемых в единицу времени.
91. Между периодом, частотой и круговой частотой существует связь. Какая из приведенных формул отображает связь между периодом и частотой вращения?
а)  ;
;
б)  ;
;
в)  .
.
92. Между периодом, частотой и круговой частотой существует связь. Какая из приведенных формул отображает связь между периодом и круговой частотой вращения?
а) ;
б) ;
в) .
93. Между периодом, частотой и круговой частотой существует связь. Какая из приведенных формул отображает связь между частотой и круговой частотой вращения?
а) ;
б) ;
в) .
94. Между линейными и угловыми скоростями и ускорениями существует связь. Какая из приведенных формул отображает связь между линейной скоростью и угловой скоростью?
а)  ;
;
б)  ;
;
в)  ;
;
г)  ;
;
д)  .
.
95. Между линейными и угловыми скоростями и ускорениями существует связь. Какая из приведенных формул отображает связь между нормальным ускорением и угловым ускорением?
а) ;
б) ;
в) ;
г) ;
д) .
96. Между линейными и угловыми скоростями и ускорениями существует связь. Какая из приведенных формул отображает связь между тангенциальным ускорением и угловым ускорением?
а) ;
б) ;
в) ;
г) ;
д) .
97. Между линейными и угловыми скоростями и ускорениями существует связь. Какая из приведенных формул отображает связь между полным линейным ускорением и угловой скоростью и угловым ускорением?
а) ;
б) ;
в) ;
г) ;
д) .
98. Точка М движется по спирали с постоянной по величине линейной скоростью в направлении, указанном стрелкой (рис. 1). При этом величина нормального ускорения:
| а) уменьшается; б) увеличивается; в) не изменяется. | 
|
99. Диск радиуса R вращается вокруг вертикальной оси равноускоренно по часовой стрелке (рис. 1). Направление вектора углового ускорения – это:
| а) 1; б) 4; в) 3; г) 2. | 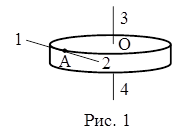
|
100. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). С какой линейной скоростью движется нижняя точка колеса, соприкасающаяся с поверхностью дороги, если она не проскальзывает, относительно Земли?
| а) 60 км/ч; б) 120 км/ч; в) 0. | 
|
101. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). С какой линейной скоростью движется верхняя точка колеса относительно Земли?
| а) 60 км/ч; б) 120 км/ч; в) 0. | 
|
102. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). С какой линейной скоростью движется любая точка колеса относительно оси?
| а) 60 км/ч; б) 120 км/ч; в) 0. |
|
103. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). С какой линейной скоростью движется точка N колеса относительно Земли?
| а) » 60 км/ч; б) » 85 км/ч; в) » 120 км/ч; г) 0. | 
|
104. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). С какой линейной скоростью движется точка N колеса относительно Земли?
| а) » 60 км/ч; б) » 85 км/ч; в) » 120 км/ч; г) 0. | 
|
105. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). Направление вращения одного из колес указано стрелкой. Укажите направление линейной скорости движения точки N колеса относительно Земли:
| а) 1; б) 2; в) 3; г) 4. | 
|
106. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). Направление вращения одного из колес указано стрелкой. Укажите направление линейной скорости движения точки N колеса относительно Земли:
| а) 1; б) 2; в) 3; г) 4. | 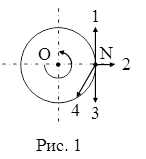
|
107. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч (рис. 1). Направление вращения одного из колес указано стрелкой. Укажите направление линейной скорости движения точки N колеса относительно Земли:
| а) 1; б) 2; в) 3; г) 4. | 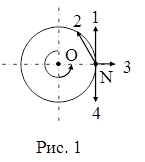
|
108. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Вектор линейной скорости некоторой точки М колеса направлен так, как показано на рисунке 1. Как направлен вектор угловой скорости этой точки?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
109. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Вектор линейной скорости некоторой точки М колеса направлен так, как показано на рисунке 1. Как направлен вектор угловой скорости этой точки?
| а) влево; б) вправо; в) к нам; г) от нас. | 
|
110. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Вектор линейной скорости некоторой точки М колеса направлен так, как показано на рисунке 1. Как направлен вектор угловой скорости этой точки?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
111. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Вектор линейной скорости некоторой точки М колеса направлен так, как показано на рисунке 1. Как направлен вектор угловой скорости этой точки?
| а) влево; б) вправо; в) к нам; г) от нас. | 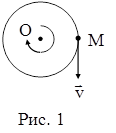
|
112. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор угловой скорости точки М?
| а) влево; б) вправо; в) к нам; г) от нас. | 
|
113. Автомобиль движется равномерно и прямолинейно с линейной скоростью 60 км/ч. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор угловой скорости точки М?
| а) влево; б) вправо; в) к нам; г) от нас. | 
|
114. Автомобиль движется равноускоренно и прямолинейно. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор угловой скорости точки М?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
115. Автомобиль движется равноускоренно и прямолинейно. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор углового ускорения точки М?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
116. Автомобиль движется равнозамедленно и прямолинейно. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор углового ускорения точки М?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
117. Автомобиль движется равноускоренно и прямолинейно. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор углового ускорения точки М?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
118. Автомобиль движется равнозамедленно и прямолинейно. Направление вращения одного из колёс автомобиля указано стрелкой (рис. 1). Как направлен вектор углового ускорения точки М?
| а) влево; б) вправо; в) к нам; г) от нас. |
|
119. На рисунке 1 представлено движущееся в плоскости тело, у которого точки А и В имеют неодинаковые линейные скорости (v1 > v2). Как движется тело?
| а) равномерно; б) ускоренно; в) поступательно; г) совершает вращательное движение относительно точки N. | 
|
120. На рисунке 1 представлено движущееся в плоскости тело, у которого точки А и В имеют неодинаковые линейные скорости (v1 < v2). Как движется тело?
| а) равномерно; б) ускоренно; в) поступательно; г) совершает вращательное движение относительно точки N. | 
|
121. На рисунке 1 представлено движущееся в плоскости тело, у которого точки А и В имеют неодинаковые линейные скорости (v1 > v2). Как направлен вектор угловой скорости?
| а) влево; б) вправо; в) от нас; г) к нам. |
|
122. На рисунке 1 представлено движущееся в плоскости тело, у которого точки А и В имеют неодинаковые линейные скорости (v1 > v2). Как направлен вектор угловой скорости?
| а) влево; б) вправо; в) от нас; г) к нам. |
|
123. Частица движется вдоль окружности радиусом 1 м в соответствии с уравнением  . Частица остановится через:
. Частица остановится через:
а) 4 с;
б) 3 с;
в) 2 с;
г) 1 с.
124. Колебательные движения (колебания) – это:
а) движения, не изменяющиеся с течением времени;
б) движения, обладающие повторяемостью во времени;
в) процессы, не изменяющиеся с течением времени;
г) процессы, обладающие повторяемостью во времени.
125. Гармоническими колебаниями называют:
а) такие колебания, при которых физическая или любая другая величина изменяется с течением времени по закону синуса или косинуса. Например, смещение материальной точки (тела) от положения равновесия изменяется с течением времени по закону  ;
;
б) такие колебания, при которых физическая или любая другая величина изменяется с течением времени по закону синуса. Например, смещение материальной точки (тела) от положения равновесия изменяется с течением времени по закону  ;
;
в) такие колебания, при которых физическая или любая другая величина изменяется с течением времени по закону косинуса. Например, смещение материальной точки от положения равновесия изменяется с течением времени по закону  ;
;
г) такие колебания, при которых физическая или любая другая величина изменяется с течением времени по закону синуса или косинуса. Например, смещение материальной точки (тела) от положения равновесия изменяется с течением времени по закону  .
.
126. Гармонические колебания материальной точки (тела) совершаются по закону , где x – это:
а) смещение – удаление материальной точки от положения равновесия в данный момент времени t;
б) смещение – удаление материальной точки от положения равновесия в произвольный момент времени t;
в) наибольшее (максимальное) удаление материальной точки от положения равновесия;
г) среди приведенных ответов правильного нет.
127. Гармонические колебания материальной точки (тела) совершаются по закону , где x0 – это:
а) смещение – удаление материальной точки от положения равновесия в данный момент времени t;
б) смещение – удаление материальной точки от положения равновесия в произвольный момент времени t;
в) амплитуда колебаний – наибольшее (максимальное) смещение (удаление) материальной точки от положения равновесия.
128. Гармонические колебания материальной точки (тела) совершаются по закону , где  – это:
– это:
а) фаза колебаний – периодически изменяющийся аргумент функции, описывающей колебательный или волновой процесс. Определяет положение материальной точки в любой момент времени t;
б) фаза колебаний – периодически изменяющийся аргумент функции, описывающей колебательный или волновой процесс. Определяет положение материальной точки в данный момент времени t;
в) фаза колебаний – определяет положение материальной точки в данный момент времени t.
129. Гармонические колебания материальной точки (тела) совершаются по закону , где  – это:
– это:
а) начальная фаза колебаний – периодически изменяющийся аргумент функции, описывающей колебательный или волновой процесс. Определяет положение материальной точки в любой момент времени t;
б) начальная фаза колебаний – периодически изменяющийся аргумент функции, описывающей колебательный или волновой процесс. Определяет положение материальной точки в момент времени t = 0;
в) фаза колебаний – определяет положение материальной точки в момент времени t = 0.
130. Гармонические колебания материальной точки (тела) совершаются по закону , где  – это:
– это:
а) круговая (циклическая) частота колебаний. Определяет число колебаний, совершаемых за любой промежуток времени t;
б) круговая (циклическая) частота колебаний. Определяет число колебаний, совершаемых за промежуток времени t = 2p;
в) круговая (циклическая) частота колебаний. Определяет число колебаний, совершаемых за промежуток времени t = 1 с.
131. Гармонические колебания материальной точки (тела) совершаются по закону , где  – это:
– это:
а) период колебаний; время, в течение которого совершается любое число колебаний;
б) период колебаний; время, в течение которого совершается любое n колебаний;
в) период колебаний; время, в течение которого совершается одно полное колебание.
132. Гармонические колебания материальной точки (тела) совершаются по закону , где  – это:
– это:
а) частота колебаний; число колебаний, совершаемых в единицу времени;
б) частота колебаний; число колебаний, совершаемых за любой промежуток времени;
в) частота колебаний; число колебаний, совершаемых за время t = 2p.
133. Скорость материальной точки (тела), совершающей гармоническое колебательное движение, – это:
а) физическая величина, которая показывает, как изменяется смещение в единицу времени, численно равная первой производной от смещения по времени:  ;
;
б) физическая величина, которая показывает, как изменяется смещение в единицу времени, численно равная первой производной от смещения по времени:  ;
;
в) физическая величина, которая показывает, как изменяется смещение в единицу времени, численно равная первой производной от смещения по времени:  ;
;
г) физическая величина, которая показывает, как изменяется смещение в единицу времени, численно равная первой производной от смещения по времени:  .
.
134. Ускорение материальной точки, совершающей гармоническое колебание – это:
а) физическая величина, которая показывает, как изменяется скорость материальной точки в единицу времени, численно равная первой производной от скорости или второй производной от смещения по времени:  ;
;
б) физическая величина, которая показывает, как изменяется скорость материальной точки в единицу времени, численно равная первой производной от скорости или второй производной от смещения по времени:  ;
;
в) физическая величина, которая показывает, как изменяется скорость материальной точки в единицу времени, численно равная первой производной от скорости или второй производной от смещения по времени:  ;
;
г) физическая величина, которая показывает, как изменяется скорость материальной точки в единицу времени, численно равная первой производной от скорости или второй производной от смещения по времени:  .
.
135. При гармонических колебаниях:
а) скорость имеет максимальное значение, когда точка проходит положение равновесия, а ускорение – в крайних положениях;
б) скорость имеет максимальное значение, когда точка находится в крайних положениях, а ускорение – в положении равновесия;
в) скорость и ускорение имеют максимальные значения, когда точка проходит положение равновесия;
г) скорость и ускорение имеют максимальные значения, когда точка находится в крайних положениях.
136. Результат сложения гармонических колебаний можно оценить аналитеским методом и методом векторных диаграмм. Метод векторных диаграмм при сложении гармонических колебаний одного направления заключается в том, что:
а) гармонические колебания изображаются графически в виде синусоид на плоскости, амплитуды которых равны амплитудам складываемых колебаний в данный момент времени t;
б) гармонические колебания изображаются графически в виде векторов на плоскости, проведенных из начала координат, модули которых равны амплитудам, а углы наклона к оси координат – начальным фазам складываемых колебаний;
в) гармонические колебания изображаются графически в виде векторов на плоскости, проведенных из начала координат, модули которых равны амплитудам, а углы наклона к оси координат – фазам складываемых колебаний в данный момент времени t;
г) гармонические колебания изображаются графически в виде векторов на плоскости, проведенных из начала координат, модули которых равны смещениям, а углы наклона к оси координат – фазам складываемых колебаний в данный момент времени t.
137. Анализ результата сложения гармонических колебаний одного направления приводит к следующему выводу:
а) если разность начальных фаз складываемых колебаний равна четному числу p, то при k = 0 колебания синфазные, усиливают друг друга;
б) если разность начальных фаз складываемых колебаний равна четному числу p, то при k = 0 колебания синфазные, ослабляют друг друга;
в) если разность начальных фаз складываемых колебаний равна нечетному числу p, то при k = 0 колебания противофазные, ослабляют друг друга;
г) если разность начальных фаз складываемых колебаний равна нечетному числу p, то при k = 0 колебания противофазные, усиливают друг друга.
138. Аналитический метод сложения гармонических колебаний заключается в том, что результирующее колебание двух гармонических колебаний одного направления получается согласно следующему закону:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
139. Биения – это:
а) колебание, полученное в результате сложения гармонических колебаний одного направления;
б) колебание, представляющее собой один из вариантов амплитудно-модулированных колебаний;
в) периодические изменения амплитуды результирующего колебания, возникающие при сложении двух гармонических колебаний с любыми амплитудами и близкими частотами;
г) периодические изменения амплитуды результирующего колебания, возникающие при сложении двух гармонических колебаний с одинаковыми амплитудами и близкими частотами.
140. Для нахождения траектории движения материальной точки (тела) при сложении взаимно перпендикулярных колебаний необходимо:
а) из уравнений движения исключить фазу колебаний;
б) из уравнений движения исключить начальную фазу колебаний;
в) из уравнений движения исключить амплитуду колебаний;
г) из уравнений движения исключить время.
141. При сложении взаимно перпендикулярных колебаний с одинаковыми частотами, различными амплитудами и фазами, отличающимися на 900, уравнение траектории имеет вид:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
142. Уравнение результирующего колебания имеет вид 
 , где
, где  – это:
– это:
а) максимальное смещение результирующего колебания, которое зависит от разности частот складываемых колебаний;
б) смещение результирующего колебания, которое зависит от разности частот складываемых колебаний;
в) амплитуда результирующего колебания, которая зависит от разности частот складываемых колебаний;
143. Уравнение результирующего колебания имеет вид  , где
, где  – это:
– это:
а) максимальное смещение результирующего колебания, которое зависит от частот складываемых колебаний;
б) смещение результирующего колебания в данный момент времени t, которое зависит от частот складываемых колебаний;
в) смещение результирующего колебания в данный момент времени t, изменяющееся по гармоническому закону.
144. В результате сложения гармонических колебаний с одинаковыми частотами, различными амплитудами с начальными фазами, равными нулю, возникает результирующее колебание, которое является:
а) ангармоническим;
б) гармоническим;
в) биением.
145. В результате сложения гармонических колебаний с одинаковыми частотами, различными амплитудами с начальными фазами возникает результирующее колебание, траектория движения которого – это:
а) окружность;
б) эллипс;
в) прямая линия.
146. В результате сложения гармонических колебаний, начальные фазы j1 и j2 которых отличаются на угол, равный 90º, возникает результирующее гармоническое колебание. При неравных амплитудах траектория движения результирующего колебания – это:
а) окружность;
б) эллипс;
в) прямая линия.
147. В результате сложения гармонических колебаний, начальные фазы j1 и j2 которых отличаются на угол, равный 90°, возникает результирующее гармоническое колебание. При x0 = y0 траектория движения результирующего колебания – это:
а) окружность;
б) эллипс;
в) прямая линия;
148. Материальная точка совершает гармоническое колебание с амплитудой А = 4 см и периодом Т = 2 с. Если смещение точки в момент времени, принятый за начальный, равно нулю, то точка колеблется в соответствии с уравнением (в СИ):
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
149. Складываются два гармонических колебания одного направления с одинаковыми периодами и равными амплитудами. При разности фаз в 270º амплитуда результирующего колебания равна:
а) x0 = 2А0;
б)  ;
;
в)  ;
;
г)  .
.
150. Точка М одновременно колеблется по гармоническому закону вдоль осей координат ох и oy с различными амплитудами, но одинаковыми частотами (рис. 1). При разности фаз в 90º траектория точки М имеет вид:

а) 4;
б) 1;
в) 3;
г) 2.
151. Период колебаний математического маятника определяется соотношением  . Изменится ли его ускорение, если его переместить из воздуха в воду?
. Изменится ли его ускорение, если его переместить из воздуха в воду?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
152. Период колебаний математического маятника определяется соотношением . Изменится ли его ускорение, если его переместить из воздуха в масло?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
153. Период колебаний математического маятника определяется соотношением . Изменится ли его частота, если его переместить из воздуха в воду?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
154. Период колебаний математического маятника определяется соотношением . Изменится ли его частота, если его переместить из воздуха в масло?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
155. Период колебаний математического маятника, выполненного в виде стального шарика, определяется соотношением . Изменится ли его период, если под ним поместить магнит?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
156. Период колебаний математического маятника, выполненного в виде стального шарика, определяется соотношением . Изменится ли его частота, если под ним поместить магнит?
а) не изменится;
б) изменится;
в) увеличится;
г) уменьшится.
157. Два математеческих маятника одинаковой длины представляют собой полые шары, один из которых заполнен водой, а другой – песком. Маятники отклоняют на одинаковые углы от положения равновесия. Будут ли одинаковыми их периоды колебаний?
а) нет;
б) да;
в) у маятника с песком период колебаний будет больше;
г) у маятника с песком период колебаний будет меньше.
158. Два математеческих маятника одинаковой длины представляют собой полые шары, один из которых заполнен водой, а другой – песком. Маятники отклоняют на одинаковые углы от положения равновесия. Будет ли одинаковым время их колебаний, если среда, в которой они совершают колебания, – вакуум?
а) нет;
б) да;
в) маятник с песком будет совершать колебания больший промежуток времени;
г) маятник с водой будет совершать колебания меньший промежуток времени.
159. Два математеческих маятника одинаковой длины представляют собой полые шары, один из которых заполнен водой, а другой – песком. Маятники откляют на одинаковые углы от положения равновесия. Будет ли одинаковым время их колебаний, если среда, в которой они совершают колебания, – воздух?
а) нет;
б) да;
в) маятник с песком будет совершать колебания больший промежуток времени;
г) маятник с водой будет совершать колебания меньший промежуток времени.
Основные понятия, определения и законы классической динамики
1. Динамика изучает:
а) движение и взаимодействия тел вне связи с причинами, обусловливающими тот или иной характер движения и взаимодействия;
б) только движение тел совместно с причинами, обусловливающими тот или иной характер движения и взаимодействия;
в) только взаимодействия тел совместно с причинами, обусловливающими тот или иной характер движения и взаимодействия;
г) движение и взаимодействия тел совместно с причинами, обусловливающими тот или иной характер движения и взаимодействия.
2. Основная задача динамики – это:
а) для данного тела по известной результирующей силе найти его ускорение;
б) для данного тела по известному ускорению найти результирующую силу, действующую на тело;
в) для данного тела по известной результирующей силе найти его ускорение и, наоборот, по известному ускорению найти результирующую силу, действующую на тело.
3. Масса m – это:
а) физическая величина, характеризующая количество вещества, инертность, гравитационные свойства и энергию материального тела;
б) физическая величина, характеризующая только количество вещества и инертность;
в) физическая величина, характеризующая только гравитационные свойства и энергию материального тела;
г) физическая величина, характеризующая только и инертность материального тела.
4. Импульс (количество движения) – это:
а) векторная физическая величина, равная произведению массы на скорость;
б) скалярная физическая величина, равная произведению массы на скорость;
в) векторная физическая величина, описывающая свойства движущихся тел;
г) скалярная физическая величина, описывающая свойства движущихся тел.
5. Вектор импульса (количества движения):
а) направлен произвольно по отношению к вектору скорости;
б) противоположен вектору скорости;
в) совпадает по направлению с вектором скорости.
6. Полный импульс системы – это:
а) скалярная физическая величина, равная произведению массы системы на скорость ее центра масс;
б) векторная физическая величина, равная произведению массы системы на скорость ее центра масс;
в) векторная физическая величина, равная произведению массы системы на её скорость;
г) скалярная физическая величина, равная произведению массы системы на её скорость.
7. Центр масс (или центр инерции) системы  – это:
– это:
а) воображаемая точка, положение которой определяется радиус-вектором, математическая форма записи которого представлена, где mi и ri – соответственно масса и радиус-вектор i-й материальной точки; n – число материальных точек в системе;
б) воображаемая точка, положение которой характеризует только распределение массы этой;
в) воображаемая точка, положение которой характеризует распределение массы этой системы;
г) воображаемая точка, положение которой характеризует распределение массы этой системы и определяется радиус-вектором.
8. Формула, с помощью которой можно определить скорость центра масс:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
9. При движении тела (материальной точки, системы) со скоростью, гораздо меньшей, чем скорость распространения света в вакууме, масса:
а) зависит от скорости;
б) остаётся величиной постоянной;
в) не остаётся величиной постоянной;
г) не зависит от скорости.
10. При движении тела или системы со скоростью, гораздо меньшей, чем скорость распространения света в вакууме, импульс:
а) зависит от скорости;
б) остаётся величиной постоянной;
в) не остаётся величиной постоянной;
г) не зависит от скорости.
11. Покой – это частный случай:
а) любого движения со скоростью, равной нулю;
б) любого прямолинейного движения со скоростью, не равной нулю;
в) любого движения со скоростью, не равной нулю;
г) равномерного прямолинейного движения со скоростью, равной нулю.
12. Инерция – это:
а) свойство тел сохранять состояние покоя или равномерного прямолинейного движения;
б) свойство тел сохранять только состояние покоя;
в) свойство тел сохранять только состояние равномерного прямолинейного движения;
г) свойство тел не сохранять состояние покоя или равномерного прямолинейного движения.
13. Первый закон Ньютона:
а) в любых системах отсчёта «всякое тело продолжает удерживаться в своём состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние»;
б) существуют такие системы отсчета, в которых «всякое тело продолжает удерживаться в своём состоянии покоя пока и поскольку оно не понуждается приложенными силами изменить это состояние»;
в) существуют такие системы отсчета, в которых «всякое тело продолжает удерживаться в своём состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние»;
г) существуют такие системы отсчета, в которых «всякое тело продолжает удерживаться в состоянии равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние».
14. Сила  в механике – это:
в механике – это:
а) скалярная физическая величина, которая отображает меру механического воздействия на данное материальное тело, других тел;
б) скалярная физическая величина, которая не отображает меру механического воздействия на данное материальное тело, других тел;
в) векторная физическая величина, которая не отображает меру механического воздействия на данное материальное тело, других тел;
г) векторная физическая величина, которая отображает меру механического воздействия на данное материальное тело, других тел.
15. В результате действия силы:
а) тело деформируется;
б) изменяется состояние движения тела (тело приобретает ускорение);
в) изменяется состояние движения тела (тело приобретает ускорение) или тело деформируется;
г) не изменяется состояние движения тела, тело только деформируется.
16. На покоящееся тело действуют две силы –  и
и  . Результирующая этих будет определяться соотношением:
. Результирующая этих будет определяться соотношением:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
17. На движущееся тело действуют две силы – и . Результирующая этих будет определяться соотношением:
а) ;
б) ;
в) ;
г) .
18. На материальную точку действуют две одинаковые по величине силы – и (рис. 1). Результирующая этих будет направлена по направлению:
| а) 1; б) 2; в) 3; г) 4. | 
|
19. На материальную точку действуют две разные по величине силы – и (рис. 1). При этом ||=2||. Результирующая этих будет направлена по направлению:
| а) 1; б) 2; в) 3; г) 4. | 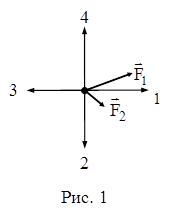
|
20. На материальную точку действуют две разные по величине силы – и (рис. 1). При этом ||=2||. Результирующая этих будет направлена по направлению:
| а) 1; б) 2; в) 3; г) 4. | 
|
21. На материальную точку действуют три силы , и  (рис. 1). При этом ||=||=2||. Результирующая этих будет направлена по направлению:
(рис. 1). При этом ||=||=2||. Результирующая этих будет направлена по направлению:
| а) 1; б) 2; в) 3; г) 4. | 
|
22. На материальную точку действуют три силы , и (рис. 1). При этом ||=||=2||. Результирующая этих будет направлена по направлению:
| а) 1; б) 2; в) 3; г) 4. | 
|
23. Закон независимости действия сил:
а) «При действии на тело нескольких сил каждая из них сообщает телу такое же ускорение, какое сообщает результирующая сила, всех сил, действующих на тело»;
б) «При действии на тело нескольких сил каждая из них сообщает телу такое же ускорение, какое она сообщила, если бы действовала одна»;
в) «При действии на тело нескольких сил каждая из них сообщает телу такое же ускорение, какое сообщает результирующая сила, нескольких выбранных, действующих на тело».
24. Второй закон Ньютона:
а) «Изменение количества движения (импульса) пропорционально приложенной движущей силе и происходит по направлению той прямой, по которой эта сила действует»;
б) «Изменение количества движения (импульса) пропорционально приложенной движущей силе и происходит в направлении, противоположном направлению действующей силы»;
в) «Сила, действующая на материальную точку, пропорциональна его массе и обратно пропорциональна ускорению»;
г) «Сила, действующая на материальную точку, пропорциональна только её массе».
25. Какая из приведенных формул является математической формой записи второго закона Ньютона в общем случае?
а)  ;
;
б)  ;
;
в)  ;
;
г)  ;
;
д)  .
.
26. Какая из приведенных формул является математической формой записи второго закона Ньютона при t, стремящемся к нулю?
а) ;
б) ;
в) ;
г) .
27. Какое из приведенных соотношений отбражает то, что при скорости v, гораздо меньшей, чем скорость распространения света в вакууме, ускорение, с которым движется тело, прямо пропорционально приложенной силе и обратно пропорционально массе тела:
а)  ;
;
б) ;
в)  .
.
28. Инерциальные системы отсчета – это:
а) системы отсчета, в которых выполняется только первый закон Ньютона;
б) системы отсчета, в которых выполняется только второй закон Ньютона (его уравнение и все следствия);
в) системы отсчета, движущиеся с постоянной скоростью прямолинейно, относительно другой, произвольно выбранной инерциальной системы отсчета;
г) системы отсчета, в которых выполняются первый и второй законы Ньютона (его уравнения и все следствия);
д) системы отсчёта, в которых тело движется с одним и тем же ускорением, а, следовательно, на него действует одна и та же результирующая сила.
29. Неинерциальные системы отсчета – это:
а) системы отсчета, движущиеся по отношению к любой инерциальной системе отсчета с ускорением;
б) системы отсчёта, в которых тело движется с одним и тем же ускорением, а, следовательно, на него действует одна и та же результирующая сила;
в) системы отсчёта, в которых даже при  ускорение тела относительно этой системы отсчёта не равно нулю.
ускорение тела относительно этой системы отсчёта не равно нулю.
30. Основной закон классической динамики, записанный в математической форме :
а) не инвариантен при переходе от одной инерциальной системы отсчета к другой инерциальной системе отсчета;
б) не изменяет своей формы при переходе от одной инерциальной системы отсчета к другой инерциальной системе отсчета;
в) инвариантен при переходе от одной инерциальной системы отсчета к другой инерциальной системе отсчёта;
г) изменяет свою форму при переходе от одной инерциальной системы отсчета к другой инерциальной системе отсчета.
31. Третий закон Ньютона:
а) «Взаимодействия двух тел друг на друга между собой равны и направлены в одну и ту же сторону»;
б) «Действию всегда есть равное и противоположное противодействие»;
в) «Взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны»;
г) «Действию всегда есть равное и противоположное противодействие, иначе, взаимодействия двух тел друг на друга между собой равны и направлены в противоположные стороны».
32. Из третьего закона Ньютона следует, что силы действия и противодействия приложены к разным телам и:
а) никогда не уравновешивают друг друга;
б) уравновешивают друг друга;
в) иногда уравновешивают друг друга.
33. Какая из приведенных формул отображает третий закон Ньютона?
а) ;
б)  ;
;
в)  ;
;
г)  .
.
34. Согласно современным представлениям и терминологии, в первом и втором законах Ньютона под телом следует понимать:
а) твердое тело;
б) материальную точку;
в) систему материальных точек.
35. Импульс силы  – мера действия силы за некоторый промежуток времени. При этом
– мера действия силы за некоторый промежуток времени. При этом  . Данное выражение справедливо в том случае, когда:
. Данное выражение справедливо в том случае, когда:
а) ;
б)  ;
;
в)  .
.
36. Импульс силы – мера действия силы за некоторый промежуток времени. При этом  . Данное выражение справедливо в том случае, когда:
. Данное выражение справедливо в том случае, когда:
а) ;
б) ;
в) ;
г)  .
.
37. Силы инерции – это силы, которые:
а) действуют на тело при ускоренном движении одной инерциальной системы отсчета относительно другой инерциальной системы отсчета;
б) возникают при ускоренном поступательном движении системы отсчета;
в) действуют на тело, движущееся во вращающейся системе отсчета.
38. Основная задача динамики вращательного движения – это:
а) нахождение линейного ускорения по известным угловым ускорениям;
б) нахождение сил, действующих на тело, по известным угловым ускорениям;
в) нахождение угловых ускорений различных тел, сообщаемых известными силами.
39. Момент силы относительно неподвижного центра вращения – это:
а) векторная физическая величина, модуль которой равен произведению модуля силы на плечо;
б) векторная физическая величина, которая определяется соотношением  ;
;
в) векторная физическая величина, численное значение которой определяется соотношением  .
.
40. Момент силы относительно оси, перпендикулярной оси вращения:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
41. Момент силы относительно оси, параллельной оси вращения:
а) ;
б) ;
в) ;
г) .
42. Момент инерции – величина:
а) характеризующая распределение масс в теле;
б) являющаяся, наряду с массой, мерой инертности тела при непоступательном движении;
в) характеризующая распределение масс в теле и являющаяся, наряду с массой, мерой инертности тела при непоступательном движении.
43. Момент инерции материальной точки относительно неподвижной оси вращения – это:
а) векторная физическая величина, равная произведению массы материальной точки на квадрат расстояния до оси или центра вращения;
б) скалярная физическая величина, равная произведению массы материальной точки на квадрат расстояния до оси или центра вращения;
в) физическая величина, равная произведению массы материальной точки на квадрат расстояния до оси или центра вращения;
г) среди приведенных ответов правильного нет.
44. Момент инерции тела относительно неподвижной оси z – физическая величина, равная сумме моментов инерции отдельных материальных точек тела относительно той же оси вращения, определяемая соотношением:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
45. Теорема Штейнера утверждает:
а) «Момент инерции тела относительно произвольной оси z равен сумме момента инерции того же тела I0 относительно оси, проходящей через центр масс, и произведения массы тела m на квадрат расстояния между осями»;
б) «Момент инерции тела относительно произвольной оси z равен сумме момента инерции того же тела I0 относительно оси, параллельной данной и проходящей через любую точку тела, и произведения массы тела m на квадрат расстояния между осями»;
в) «Момент инерции тела относительно произвольной оси z равен сумме момента инерции того же тела I0 относительно оси, параллельной данной и проходящей через центр масс, и произведения массы тела m на квадрат расстояния между осями».
46. Момент инерции однородного диска относительно оси, проходящей через центр масс (точку О), определяется соотношением  . Момент инерции этого же диска относительно оси, проходящей параллельно данной через точку А, которая находится на расстоянии равном половине радиуса, равен:
. Момент инерции этого же диска относительно оси, проходящей параллельно данной через точку А, которая находится на расстоянии равном половине радиуса, равен:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
47. Момент инерции однородного диска относительно оси, проходящей через центр масс (точку О), определяется соотношением . Момент инерции этого же диска относительно оси, проходящей параллельно данной через точку А (точка А находится на расстоянии  ), равен:
), равен:
а) ;
б) ;
в) ;
г) .
48. Момент импульса материальной точки относительно неподвижной оси вращения – это:
а) векторная физическая величина, модуль которой равен произведению модуля импульса на кратчайшее расстояние между осью вращения и направлением вектора импульса;
б) векторная физическая величина, модуль которой равен произведению модуля импульса на плечо;
в) скалярная физическая величина, модуль которой равен произведению модуля импульса на плечо.
49. Момент импульса материальной точки относительно неподвижной оси вращения определяется соотношением:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
50. Момент импульса, которым обладает тело, движущееся равномерно, относительно произвольной оси (точки):
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
51. Момент импульса материальной точки, совершающей вращательное движение с постоянной линейной скоростью, относительно неподвижной оси, проходящей через центр вращения:
а) ;
б) ;
в) ;
г) .
52. Момент импульса материальной точки, совершающей вращательное движение с постоянной линейной скоростью, относительно неподвижной оси, не проходящей через центр вращения:
а) ;
б) ;
в) ;
г) .
53. Связь момента импульса, угловой скорости и момента инерции отображается соотношением  . Направление вектора момента импульса:
. Направление вектора момента импульса:
а) не совпадает с направлением вектора угловой скорости;
б) совпадает с направлением вектора угловой скорости;
в) противоположно направлению вектора угловой скорости;
г) перпендикулярно направлению вектора угловой скорости.
54. Векторы момента сил, момента импульса и углового ускорения связаны между собой соотношениями  и
и  . Момент сил, совпадающий по направлению с моментом импульса:
. Момент сил, совпадающий по направлению с моментом импульса:
а) уменьшает момент имульса;
б) не изменяет момент импульса;
в) увеличивает момент импульса.
55. Векторы момента сил, момента импульса и углового ускорения связаны между собой соотношениями и . Момент сил, направленный навстречу моменту импульса:
а) уменьшает момент имульса;
б) не изменяет момент импульса;
в) увеличивает момент импульса.
56. Векторы момента сил, момента импульса и углового ускорения связаны между собой соотношениями и . Момент сил, совпадающий по направлению с моментом импульса:
а) уменьшает угловое ускорение;
б) не изменяет угловое ускорение;
в) увеличивает угловое ускорение.
57. Векторы момента сил, момента импульса и углового ускорения связаны между собой соотношениями и . Момент сил, направленный навстречу моменту импульса:
а) уменьшает угловое ускорение;
б) не изменяет угловое ускорение;
в) увеличивает угловое ускорение.
58. На рисунке 1 представлена круглая палочка, к которой на нерастяжимой нити привязан шарик. Шарику сообщают начальную скорость  в направлении, перпендикулярном к нити. Шарик начинает вращаться вокруг палочки, причём нить накручивается на палочку и шарик движется по закручивающейся спирали относительно точки О, совпадающей с осью палочки. В этом случае момент силы (силу тяжести не принимаем во внимание):
в направлении, перпендикулярном к нити. Шарик начинает вращаться вокруг палочки, причём нить накручивается на палочку и шарик движется по закручивающейся спирали относительно точки О, совпадающей с осью палочки. В этом случае момент силы (силу тяжести не принимаем во внимание):
| а) ;
б) ;
в) ;
г) .
| 
|
59. На рисунке 1 представлена круглая палочка, к которой на нерастяжимой нити привязан шарик. Шарику сообщают начальную скорость в направлении, перпендикулярном к нити. Шарик начинает вращаться вокруг палочки, причём нить накручивается на палочку и шарик движется по закручивающейся спирали относительно точки О, совпадающей с осью палочки. В этом случае момент импульса (силу тяжести не принимаем во внимание):
| а) ;
б) ;
в) ;
г) .
|
|
60. Основной закон динамики вращательного движения твердых (недеформирующихся) тел, для которых I = const (второй закон динамики для вращательного движения), математически можно записать следующим образом:
а)  ;
;
б)  ;
;
в)  .
.
61. Момент силы, действующий на твердое тело с закрепленной осью вращения, как векторная величина определяется:
а) векторным произведением радиус-вектора любой точки твердого тела, не лежащей на его оси, на произвольное направление силы, приложенной в этой точке;
б) векторным произведением радиус-вектора любой точки твердого тела, лежащей на его оси, на произвольное направление силы, приложенной в этой точке;
в) векторным произведением радиус-вектора любой точки твердого тела, не лежащей на его оси, на вектор касательной силы, перпендикулярный к радиус-вектору и приложенной в этой точке;
г) векторным произведением радиус-вектора любой точки твердого тела, лежащей на его оси, на модуль касательной силы в этой точке;
д) векторным произведением радиус-вектора любой точки твердого тела, не лежащей на его оси, на вектор силы, параллельный оси.
62. Максимальная величина модуля вектора момента силы, действующей на твердое тело с закрепленной осью вращения, определяется следующим образом:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
63. Результирующая внешних и внутренних сил, действующих на твердое тело с закрепленной осью вращения, определяется:
а) векторной суммой всех внешних и внутренних сил;
б) векторной суммой только внешних сил;
в) векторной суммой только внутренних сил;
г) скалярной суммой только внешних сил.
64. Вектор момента внешней касательной силы, действующей на твердое тело с закрепленной осью вращения и лежащей в одной плоскости с радиус-вектором ее приложения, направлен:
а) параллельно вектору силы;
б) под углом к плоскости векторов силы и радиуса;
в) перпендикулярно векторам силы и радиуса безотносительно к направлению;
г) вдоль оси вращения, и его направление определяется правилом правого винта.
65. Вектор момента импульса при ускоренном вращении твердого тела с закрепленной осью вращения направлен вдоль:
а) вектора касательной силы в точке его приложения;
б) радиус-вектора;
в) векторов момента силы и угловой скорости;
г) противоположно векторам момента силы и угловой скорости.
66. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр О диска перпендикулярно плоскости рисунка, то плечо силы равно:
| а) а; б) b; в) с; г) 0. | 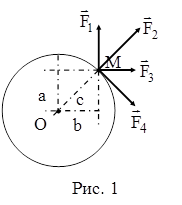
|
67. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр О диска перпендикулярно плоскости рисунка, то плечо силы равно:
| а) а; б) b; в) с; г) 0. |
|
68. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр О диска перпендикулярно плоскости рисунка, то плечо силы равно:
| а) а; б) b; в) с; г) 0. |
|
69. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр О диска перпендикулярно плоскости рисунка, то плечо силы  равно:
равно:
| а) а; б) b; в) с; г) 0. | 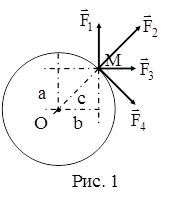
|
70. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы численно равен:
а)  ;
б) ;
б)  ;
в) ;
в)  ;
г) ;
г)  . .
| 
|
71. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы численно равен:
а)  ;
б) ;
б)  ;
в) ;
г) ;
в) ;
г)  . .
|
|
72. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы численно равен:
а)  ;
б) ;
б)  ;
в) ;
г) ;
в) ;
г)  . .
|
|
73. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы численно равен:
а)  ;
б) ;
б)  ;
в) ;
г) ;
в) ;
г)  . .
|
|
74. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы направлен:
| а) вдоль оси вращения «от нас»; б) вдоль оси вращения «к нам»; в) вдоль прямой ОМ. |
|
75. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы направлен:
| а) вдоль оси вращения «от нас»; б) вдоль оси вращения «к нам»; в) вдоль прямой ОМ; г) среди приведенных ответов правильного нет. |
|
76. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы направлен:
| а) вдоль оси вращения «от нас»; б) вдоль оси вращения «к нам»; в) вдоль прямой ОМ. |
|
77. К точке М, лежащей на внешней поверхности диска, приложены 4 силы (рис. 1). Если ось вращения проходит через центр диска (точку О) перпендикулярно плоскости рисунка, то момент силы направлен:
| а) вдоль оси вращения «от нас»; б) вдоль оси вращения «к нам»; в) вдоль прямой ОМ. |
|
78. На рисунке 1 представлены сплошной цилиндр и диск, изготовленные из стали, которые имеют одинаковые радиусы. Для их моментов инерции справедливо:
| а) Iц > Iд; б) Iц < Iд; в) Iц = Iд. | 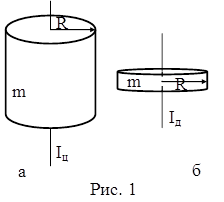
|
79. На рисунке 1 представлены сплошной цилиндр и диск, которые имеют одинаковые массы и радиусы. Для их моментов инерции справедливо соотношение:
| а) Iц > Iд; б) Iц < Iд; в) Iц = Iд. |
|
80. На рисунке 1 представлен сплошной диск, изготовленный из стали, который имеет массу m, радиус R и высоту h. Если высоту h диска увеличить в два раза, то его момент инерции:
| а) не изменится; б) уменьшится в два раза; в) увеличится в два раза. | 
|
81. Момент импульса тела относительно неподвижной оси изменяется по закону  . Укажите график (рис. 1), правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
. Укажите график (рис. 1), правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
| а) 1; б) 3; в) 2; г) 4. | 
|
82. Момент импульса тела относительно неподвижной оси изменяется по закону  (рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
(рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
| а) 1; б) 3; в) 2; г) 4. | 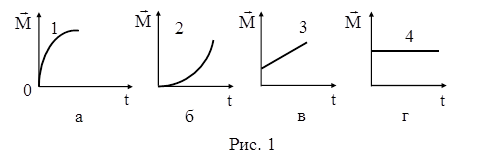
|
83. Момент импульса тела относительно неподвижной оси изменяется по закону  (рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
(рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
| а) 1; б) 3; в) 2; г) 4. |
|
84. Момент импульса тела относительно неподвижной оси изменяется по закону  (рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
(рис. 1). Укажите график, правильно отражающий зависимость величины момента сил, действующих на тело, от времени:
| а) 1; б) 3; в) 2; г) 4. | 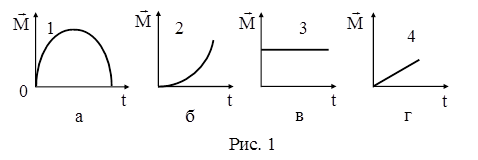
|
85. Осциллятор – это:
а) физическая система, совершающая вращательное движение;
б) физическая система, совершающая колебания;
в) система, у которой величины, описывающие ее движение, периодически меняются с течением времени;
г) система, у которой величины, описывающие ее движение, периодически меняются с течением времени только по гармоническому закону.
86. Гармонический осциллятор – это:
а) физическая система, совершающая вращательное движение;
б) система, у которой величины, описывающие ее движение, периодически меняются с течением времени;
в) механическая система, совершающая колебания около положения устойчивого равновесия, описывающие величины которой изменяются по гармоническому закону;
г) физическая система, совершающая колебания.
87. Уравнение движения гармонического осциллятора:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
88. Решение уравнения движения гармонического осциллятора:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
89. Пружинный маятник – это:
а) тело массой m, подвешенное на абсолютно упругой пружине, совершающее гармоническое колебание;
б) тело массой m, подвешенное на пружине, совершающее гармоническое колебание;
в) линейный гармонический осциллятор, совершающий прямолинейные гармонические колебания под действием упругой силы  ;
;
г) линейный гармонический осциллятор, совершающий гармонические колебания под действием упругой силы  .
.
90. Уравнение движения пружинного маятника:
а) ;
б) ;
в)  ;
;
г)  .
.
91. Решением уравнения движения пружинного маятника является выражение:
а) ;
б)  ;
;
в) ;
г) .
92. Круговая частота колебаний пружинного маятника определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
93. Частоту колебаний пружинного маятника можно определить по формуле:
а)  ;
;
б)  ;
;
в)  .
.
94. Период колебаний пружинного маятника определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
95. Период незатухающих колебаний пружинного маятника:
а) увеличивается с ростом упругости пружины и убывает с увеличением массы груза;
б) увеличивается прямо пропорционально массе груза и убывает обратно пропорционально жесткости пружины;
в) изменяется со временем по гармоническому закону;
г) в свободно падающем лифте равен нулю;
д) увеличивается с увеличением массы груза и убывает с ростом упругости пружины.
96. Физический маятник – это:
а) твердое тело, совершающее колебательное движение относительно оси, не совпадающей с центром масс;
б) твёрдое тело, совершающее под действием силы тяжести колебания относительно горизонтальной оси, не совпадающей с центром масс;
в) твердое тело, совершающее колебательное движение относительно оси, совпадающей с центром масс;
г) твёрдое тело, совершающее под действием силы тяжести колебания относительно горизонтальной оси, совпадающей с центром масс.
97. Уравнение движения физического маятника имеет вид:
а)  ;
;
б)  ;
;
в)  .
.
98. Уравнение движения физического маятника при малых углах отклонения имеет вид:
а) ;
б) ;
в) .
99. Решение уравнения движения физического маятника имеет вид:
а) ;
б) ;
в) ;
г)  .
.
100. Круговая частота колебаний физического маятника определяется по формуле:
а) ;
б)  ;
;
в) .
101. Частота колебаний физического маятника определяется соотношением:
а) ;
б) ;
в) .
102. Период колебаний физического маятника равен:
а) ;
б) ;
в) .
103. Математический маятник – это:
а) тело массой m, подвешенное на невесомой, нерастяжимой нити;
б) тело массой m, размерами которого можно пренебречь, подвешенное на любой нити;
в) тело массой m, размерами которого можно пренебречь, подвешенное на невесомой, нерастяжимой нити.
104. Круговая частота колебаний математического маятника:
а) ;
б) ;
в) .
105. Частота колебаний математического маятника равна:
а) ;
б) ;
в) .
106. Период колебаний математического маятника определяется соотношением:
а) ;
б) ;
в) .
107. На рисунке 1 представлен один из возможных вариантов физического маятника. Точка К, находящаяся на продолжении прямой ОС, называется центром качаний физического маятника. Если ось подвеса сделать проходящей через центр качаний, то период колебаний физического маятника:
а)  ;
б) ;
б)  ;
в) ;
в)  ;
г) ;
г)  . .
| 
|
108. Приведенная длина физического маятника – это:
а) величина, численно равная длине такого математического маятника, период колебаний которого не равен периоду колебаний физического маятника;
б) величина, численно равная;
в) величина, численно равная длине такого математического маятника, период колебаний которого равен периоду колебаний физического маятника.
109. Затухающие (свободные) колебания – это:
а) колебательные движения реальной колебательной системы, сопровождающиеся силами трения и сопротивления;
б) колебательные движения реальной колебательной системы, сопровождающиеся уменьшению амплитуды колебаний;
в) колебательные движения реальной колебательной системы, у которых энергия, потерянная системой, не восполняется за счет внешних сил.
110. Уравнение затухающих колебаний линейной колебательной системы имеет вид:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
111. Уравнение движения пружинного маятника  является дифференциальным уравнением второго порядка:
является дифференциальным уравнением второго порядка:
а) вынужденных колебаний;
б) свободных затухающих колебаний;
в) свободных незатухающих колебаний.
112. Решением дифференциального уравнения затухающих колебаний линейной колебательной системы является выражение вида:
а)  ;
;
б)  ;
;
в)  ;
;
г)  .
.
113. Круговая частота затухающих колебаний линейной колебательной системы определяется соотношением:
а) ;
б) ;
в) ;
г)  .
.
114. Частоту затухающих колебаний линейной колебательной системы можно определить по формуле:
а) ;
б) ;
в)  ;
;
г) .
115. Период затухающих колебаний линейной колебательной системы определяется соотношением:
а)  ;
;
б) ;
в) ;
г) .
116. Амплитуда затухающих колебаний линейной колебательной системы определяется соотношением  . При увеличении промежутка времени (t→∞) амплитуда:
. При увеличении промежутка времени (t→∞) амплитуда:
а) возрастает;
б) не изменяется;
в) стремится к нулю.
117. Декремент затухания – это:
а) величина, которая характеризует быстроту затухания в зависимости от числа колебаний;
б) отношение двух смещений, отличающихся друг от друга по времени на период;
в) величина, которая характеризует быстроту затухания в зависимости от времени t;
г) отношение двух смещений, отличающихся друг от друга по времени на t.
118. Логарифмический декремент затухания – это:
а) величина, равная квадрату декремента затухания;
б) величина, равная натуральному логарифму от декремента затухания;
в) величина, характеризующая затухание колебаний за период.
119. Вынужденные колебания – это:
а) колебания, совершаемые системами под действием постоянной внешней (вынуждающей) силы;
б) колебания, совершаемые системами под действием внешней (вынуждающей) силы, не изменяющейся по какому-либо закону;
в) колебания, совершаемые системами под действием внешней (вынуждающей) силы, изменяющейся по какому-либо закону;
г) колебания, совершаемые системами под действием внешней (вынуждающей) силы, изменяющейся по гармоническому закону;
120. Уравнение вынужденных колебаний имеет вид 
 . С точки зрения математики оно – это:
. С точки зрения математики оно – это:
а) дифференциальное уравнение первого порядка, однородное;
б) дифференциальное уравнение первого порядка, неоднородное;
в) дифференциальное уравнение второго порядка, однородное;
г) дифференциальное уравнение второго порядка, неоднородное.
121. Уравнение вынужденных колебаний имеет вид , где  – это:
– это:
а) вынуждающая сила;
б) внешняя сила;
в) сила сопотивления, пропорциональная скорости;
г) сила сопротивления, не зависящая от скорости.
122. Уравнение вынужденных колебаний имеет вид , где  – это:
– это:
а) вынуждающая сила;
б) возвращающая сила;
в) сила сопотивления, пропорциональная скорости;
г) сила сопротивления, не зависящая от скорости.
123. Уравнение вынужденных колебаний имеет вид , где  – это:
– это:
а) вынуждающая сила;
б) внешняя сила;
в) сила сопотивления, пропорциональная скорости;
г) сила сопротивления не зависящая от скорости.
124. Уравнение вынужденных колебаний имеет вид , где – сила сопротивления. Сила сопротивления (диссипативная сила) влияет на:
а) частоту вынуждающей силы;
б) период вынужденных колебаний;
в) амплитуду вынужденных колебаний;
г) период вынуждающей силы.
125. Диссипативная сила (сила сопротивления), действующая в пружинном маятнике:
а) объясняет малое значение амплитуды установившихся колебаний при частотах вынуждающей силы, малых и больших по сравнению с собственной частотой колебаний маятника;
б) своим увеличением повышает резонансную частоту, удаляя её от частоты собственных колебаний маятника в сторону больших частот;
в) своим увеличением приподнимает и заостряет резонансную кривую;
г) своим увеличением может сделать невозможным явление резонанса.
126. Как изменяется амплитуда вынужденных колебаний при частоте вынуждающей силы, гораздо меньшей собственной частоты колебательной системы, если затухание мало?
а) уменьшается;
б) возрастает;
в) стремится к нулю;
г) стремится к амплитуде (статическому смещению), которую вызвала бы постоянная сила F0.
127. Как изменяется амплитуда вынужденных колебаний при частоте вынуждающей силы, приблизительно равной собственной частоте колебательной системы, если затухание мало?
а) уменьшается;
б) возрастает;
в) стремится к нулю;
г) стремится к амплитуде (статическому смещению), которую вызвала бы постоянная сила F0.
128. Чему равна амплитуда вынужденных колебаний при частоте вынуждающей силы, равной собственной частоте колебательной системы, если затухание мало?
а) уменьшается;
б) возрастает;
в) стремится к нулю;
г) стремится к максимальному значению.
129. Решение уравнения вынужденных колебаний имеет вид
 ,
,
где  , а
, а  . При
. При  соответствует:
соответствует:
а) незатухающим колебаниям;
б) свободным затухающим колебаниям;
в) незатухающим периодическим колебаниям с любой частотой;
г) незатухающим периодическим колебаниям с частотой вынуждающей силы.
130. Решение уравнения вынужденных колебаний имеет вид
 ,
,
где  соответствует:
соответствует:
а) незатухающим колебаниям;
б) свободным затухающим колебаниям;
в) незатухающим периодическим колебаниям с любой частотой;
г) незатухающим периодическим колебаниям с частотой вынуждающей силы.
131. Если вынуждающая сила изменяется по гармоническому закону , то установившиеся вынужденные колебания – это:
а) гармонические колебания с частотой, равной собственной частоте;
б) гармонические колебания с новой частотой;
в) гармонические колебания с частотой, равной частоте вынуждающей силы.
132. Амплитуда вынужденных колебаний:
а) зависит от соотношения между циклическими частотами вынуждающей силы и свободных незатухающих колебаний;
б) не зависит от соотношения между циклическими частотами вынуждающей силы и свободных незатухающих колебаний;
в) зависит от амплитуды вынуждающей силы;
г) не зависит от амплитуды вынуждающей силы.
133. Начальная фаза (сдвиг фаз между смещением и вынуждающей силой):
а) зависит от соотношения между циклическими частотами вынуждающей силы и свободных незатухающих колебаний;
б) не зависит от соотношения между циклическими частотами вынуждающей силы и свободных незатухающих колебаний;
в) зависит от амплитуды вынуждающей силы;
г) не зависит от амплитуды вынуждающей силы.
134. Через некоторое время после начала вынужденных колебаний свободные колебания системы практически прекращаются. Система переходит в состояние установившихся вынужденных колебаний. В течение этого промежутка времени:
а) собственные колебания системы затухают тем быстрее, чем ближе их частота к частоте вынуждающей силы;
б) система совершает биения, переменная амплитуда которых стремится к амплитуде установившихся колебаний;
в) вынуждающая сила только возбуждает собственные затухающие колебания системы;
г) вынуждающая сила только заставляет систему совершать гармонические колебания с частотой этой силы.
135. Амплитуда установившихся вынужденных гармонических колебаний достигает максимального значения при:
а)  ;
;
б)  ;
;
в)  .
.
136. Резонанс – это:
а) явление резкого убывания амплитуды вынужденных колебаний при некоторой определенной для данной системы частоте ;
б) явление резкого возрастания амплитуды вынужденных колебаний при некоторой определенной для данной системы частоте ;
в) явление резкого возрастания амплитуды вынужденных колебаний при некоторой определенной для данной системы частоте ;
г) явление резкого возрастания амплитуды вынужденных колебаний при некоторой определенной для данной системы частоте .
137. При установившихся вынужденных колебаниях потери энергии колебательной системы, обусловленные диссипативными силами:
а) не связаны с работой, совершаемой вынуждающей силой;
б) не компенсируются работой, совершаемой вынуждающей силой;
в) частично компенсируются работой, совершаемой вынуждающей силой;
г) полностью компенсируются работой, совершаемой вынуждающей силой.
Энергия, работа, мощность. Законы сохранения
а) функция состояния системы; б) способность системы к совершению работы при переходе из одного состояния в… в) количественная мера и качественная характеристика движения и взаимодействия материи во всех ее превращениях.Поле тяготения. Движение в поле центральных сил
а) с небольшими массами; б) с большими массами; в) со значениями скорости движения гораздо меньшими, чем скорость распространения света в вакууме;Волновые процессы
а) процесс распространения колебаний в пространстве; б) изменения состояния среды (возмущения), распространяющиеся в этой среде и… в) изменения состояния среды (возмущения), распространяющиеся в этой среде и сопровождающиеся переносом вещества;Элементы механики жидкостей и газов
а) любое агрегатное состояние вещества; б) промежуточное состояние между твердым и газообразным состояниями; в) агрегатное состояние вещества, промежуточное состояние между твердым и газообразным состояниями.Основы релятивистской механики
а) «Никакие опыты, проводимые в любых системах отсчета с механическими приборами, не позволяют установить, покоится система отсчета или движется… б) «Никакие опыты, проводимые в инерциальных системах отсчета с механическими… в) «Никакие опыты, проводимые в инерциальных системах отсчета с механическими приборами, не позволяют установить,…ОСНОВЫ МОЛЕКУЛЯРНОЙ ФИЗИКИ И ТЕРМОДИНАМИКИ
Основные понятия молекулярной физики и термодинамики
1. Молекулярная физика – раздел физики, в котором изучаются физические свойства и строение вещества в различных агрегатных состояниях на основе рассмотрения их:
а) микроскопического строения;
б) молекулярного строения;
в) микроскопического и молекулярного строения;
г) атомного строения.
2. Кинетическая теория газов позволяет исследовать:
а) смеси газов;
б) многоатомные газы, когда необходимо не учитывать внутренние степени свободы (колебательные и вращательные);
в) плотные газы, когда необходимо учитывать корреляции между сталкивающимися молекулами или многократные столкновения;
г) ионизованные газы (плазму), когда нельзя ограничиться учётом короткодействующих сил, а приходится также учитывать медленно убывающие с расстоянием кулоновские силы;
д) разряженные газы, когда длина свободного пробега частиц сравнима с размерами системы и необходимо учитывать столкновения частиц со стенками.
3. Статистическая физика – раздел молекулярной физики, в котором изучаются свойства макроскопических тел, т.е. систем, состоящих из очень большого числа одинаковых частиц, исходя из:
а) свойств этих частиц;
б) взаимодействий между частицами;
в) свойств этих частиц и взаимодействий между ними.
4. Термодинамика – раздел физики, в котором изучаются наиболее общие свойства макроскопических физических систем:
а) находящихся в состоянии термодинамического равновесия;
б) находящихся в состоянии термодинамического равновесия, и процессы перехода этих систем из одного состояния в другое состояние;
в) в связи с их микроскопическим строением.
5. Термодинамическая система – это:
а) совокупность молекул, атомов и частиц;
б) совокупность рассматриваемых тел;
в) совокупность рассматриваемых тел, в частности молекул, атомов, частиц.
6. Интенсивные параметры состояния системы – это:
а) параметры, зависящие от массы системы;
б) параметры, не зависящие от массы системы;
в) давление, температура и концентрация.
7. Температура – физическая величина:
а) которая определяет направление теплового обмена;
б) характеризующая состояние термодинамического равновесия макроскопической системы;
в) которая в молекулярной физике не определяет распределение частиц по уровням энергии;
г) которая в молекулярной физике определяет распределение частиц по скоростям.
8. Термодинамическая температурная шкала – температурная шкала:
а) определяемая температура (абсолютная температура) в которой всегда равна нулю;
б) определяемая температура (абсолютная температура) в которой всегда отрицательна;
в) определяемая температура (абсолютная температура) в которой всегда положительна.
9. Экстенсивные параметры термодинамической системы – это такие параметры её состояния:
а) значения которых пропорциональны массе термодинамической системы;
б) значения которых не зависят от массы термодинамической системы;
в) значения которых пропорциональны объёму термодинамической системы;
г) как объем, внутренняя энергия, энтропия.
10. Внутренняя энергия системы равна:
а) сумме кинетических энергий хаотического движения молекул, потенциальных энергий их взаимодействия и внутримолекулярной энергии;
б) энергии системы без учёта кинетической энергии её в целом (при движении) и потенциальной энергии во внешнем поле;
в) энергии системы с учётом кинетической энергии её в целом (при движении) и потенциальной энергии во внешнем поле.
11. Изменение внутренней энергии при переходе системы из состояния в состояние равно:
а) разности значений внутренней энергии в этих состояниях, которая не зависит от пути перехода системы из одного состояния в другое;
б) разности значений внутренней энергии в этих состояниях, которая зависит от пути перехода системы из одного состояния в другое;
в) сумме значений внутренней энергии в этих состояниях, которая не зависит от пути перехода системы из одного состояния в другое;
г) сумме значений внутренней энергии в этих состояниях, которая зависит от пути перехода системы из одного состояния в другое.
12. Основное уравнение состояния системы определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
13. Неравновесное состояние системы – это такое её состояние, при котором:
а) какой-либо из параметров состояния системы равен нулю;
б) какой-либо из параметров состояния системы изменяется;
в) какой-либо из параметров состояния системы не изменяется.
14. Равновесное состояние системы – это такое её состояние, при котором:
а) параметры состояния системы имеют определённые значения, постоянные при неизменных внешних условиях;
б) параметры состояния системы имеют определённые значения, постоянные при изменяющихся внешних условиях;
в) параметры состояния системы имеют изменяющиеся значения при неизменных внешних условиях;
г) параметры состояния системы имеют изменяющиеся значения при изменяющихся внешних условиях.
15. Время релаксации – это время, в течение которого:
а) система приходит в неравновесное состояние;
б) система приходит в равновесное состояние;
в) состояние системы не изменяется;
г) состояние системы изменяется.
16. Процесс – это переход системы из одного состояния в другое состояние, связанный с изменением хотя бы одного из ее параметров состояния. Состояние идеального газа определяется значениями параметров: То, ро, Vo, где Т – термодинамическая температура, р – давление, V – объем газа. Определенное количество газа перевели из состояния (р0, V0) в состояние (2po, Vo). При этом его внутренняя энергия:
а) увеличилась;
б) не изменилась;
в) уменьшилась.
17. Обратимый процесс – это процесс, при котором:
а) возможно осуществить обратный переход системы из конечного в начальное состояние через те же промежуточные состояния так, чтобы не осталось никаких изменений в окружающей систему среде;
б) возможно осуществить обратный переход системы из конечного в начальное состояние через любые промежуточные состояния так, чтобы не осталось никаких изменений в окружающей систему среде;
в) возможно осуществить обратный переход системы из конечного в начальное состояние через те же промежуточные состояния при этом, по окончании процесса в окружающей среде или в самой системе происходят какие-либо изменения.
18. Необратимый процесс – это процесс, по окончании которого:
а) в окружающей среде или в самой системе происходят какие-либо изменения;
б) невозможно осуществить обратный переход системы в первоначальное состояние;
в) возможно осуществить обратный переход системы из конечного в начальное состояние через те же промежуточные состояния так, чтобы не осталось никаких изменений в окружающей систему среде.
19. Круговой процесс или цикл – это:
а) переход системы из начального в конечное состояние, а затем из конечного в начальное состояние через любые промежуточные состояния так, чтобы не осталось никаких изменений в окружающей систему среде;
б) переход системы из конечного в начальное состояние, а затем из начального в конечное состояние через любые промежуточные состояния так, чтобы не осталось никаких изменений в окружающей систему среде;
в) такая последовательность превращений, в результате которой система, выйдя из какого-либо исходного состояния, возвращается в него вновь.
20. Любой круговой процесс состоит из процессов расширения и сжатия. При этом процесс расширения сопровождается:
а) работой, совершаемой системой;
б) работой, совершаемой над системой;
в) работой, совершаемой системой и над системой внешними силами.
21. Любой круговой процесс состоит из процессов расширения и сжатия. При этом процесс сжатия сопровождается:
а) работой, совершаемой системой;
б) работой, совершаемой над системой внешними силами;
в) работой, совершаемой системой и над системой внешними силами.
22. Динамические закономерности – это закономерности, подчиняющиеся:
а) одному дифференциальному уравнению, допускающиму существование единственного решения для каждого начального условия;
б) системам уравнений (в том числе дифференциальных, интегральных и др.), допускающих существование единственного решения для каждого начального условия;
в) одному интегральному уравнению, допускающиму существование единственного решения для каждого начального условия;
г) системам уравнений (в том числе дифференциальных, интегральных и др.), допускающих существование множество решений.
23. Статистические закономерности – это:
а) количественные закономерности, устанавливаемые статистическим методом, в котором рассматриваются лишь средние значения величин, характеризующих данную систему;
б) количественные закономерности, рассматривающие конкретную молекулярную модель, обусловленные математическими методами статистики, основанные на теории вероятностей;
в) количественные закономерности, устанавливаемые статистическим методом, в котором рассматриваются любые значения величин, характеризующих данную систему;
г) количественные закономерности, рассматривающие любую молекулярную модель, обусловленные математическими методами статистики, основанные на теории вероятностей.
24. Термодинамическая вероятность – это:
а) число способов, которыми может быть реализовано любое состояние макроскопической физической системы;
б) предел, к которому стремится относительная частота появления некоторого события при достаточно большом, стремящемся к бесконечности числе повторений опыта при изменяющихся внешних условиях;
в) число способов, которыми может быть реализовано данное состояние макроскопической физической системы;
г) предел, к которому стремится относительная частота появления некоторого события при достаточно большом, стремящемся к бесконечности числе повторений опыта при неизменных внешних условиях.
25. Флуктуации – это:
а) случайные отклонения физических величин от их среднего значения;
б) любые отклонения физических величин от их среднего значения;
в) случайные отклонения физических величин от их истинного значения;
г) любые отклонения физических величин от их истинного значения.
26. Молекула – это:
а) наименьшая часть вещества, обладающая его основными физическими свойствами и состоящая из атомов, соединенных между собой химическими связями;
б) наименьшая часть вещества, обладающая его основными химическими свойствами и состоящая из атомов, соединенных между собой химическими связями;
в) наименьшая часть вещества, обладающая его основными химическими свойствами и состоящая из атомов, без учёта химических связяй.
27. Атом – это:
а) часть вещества микроскопических размеров (микрочастица), наименьшая частица химического элемента, являющаяся носителем только его физических свойств;
б) часть вещества микроскопических размеров (микрочастица), наименьшая частица химического элемента, которая не является носителем его свойств;
в) часть вещества микроскопических размеров (микрочастица), наименьшая частица химического элемента, являющаяся носителем его свойств.
28. Атомная масса – это:
а) относительное значение массы атома, выраженное в системе СИ;
б) относительное значение массы атома, выраженное в атомных единицах массы;
в) относительное значение массы атома, выраженное в системе СГС.
29. Молекулярная масса – это:
а) относительное значение массы молекулы, выраженное в атомных единицах массы;
б) относительное значение массы молекулы, выраженное в системе СИ;
в) относительное значение массы молекулы, выраженное в системе СГС.
30. Молярная масса, масса вещества, взятого в количестве одного моля, определяется соотношением:
а)  , где
, где  – масса отдельной молекулы любого вещества;
– масса отдельной молекулы любого вещества;
б) , где – масса отдельной молекулы данного вещества;
в) , где – масса отдельной молекулы выбранного вещества.
31. Моль в единицах СИ – количество вещества. В одном моле вещества содержится столько молекул (атомов, ионов или каких-либо других структурных элементов вещества), сколько атомов:
а) содержится в 0,012 кг нуклида углерода атомной массы 12 (С12);
б) содержится в любом элементе;
в) содержится в 0,016 кг нуклида кислорода атомной массы 16 (С16).
Основные представления и законы молекулярно-кинетической теории
а) не учитывается взаимодействие его частиц (средняя кинетическая энергия частиц намного больше энергии их взаимодействия); б) принято считать, что размеры молекул идеального газа малы по сравнению с… в) принято считать, что суммарный собственный объем молекул такого газа мал по сравнению с объемом сосуда;Основные положения и законы термодинамики
а) законом сохранения и превращения энергии, которым сопровождаются термодинамические процессы; б) утверждением, согласно которому термодинамическая система может совершать… в) утверждением, согласно которому термодинамическая система может совершать работу не только за счёт каких-либо…Реальные газы. Фазовые равновесия и превращения
а) свойства которого не зависят от взаимодействия частиц и их собственного объема; б) свойства которого зависят от взаимодействия частиц и их собственного… в) свойства которого зависят от взаимодействия частиц и их собственного объема, что особенно проявляется при высоких…Кинетические явления (явления переноса)
а) из неравновесного состояния в равновесное состояние; б) из равновесного состояния в неравновесное состояние; в) из неравновесного состояния в любое состояние;ЗАКЛЮЧЕНИЕ
Организация индивидуальной самостоятельной работы студентов всех форм обучения, предусмотренная настоящим сборником, полностью отвечает основным…Библиографический список
Основной
2. Полунин, В.М. Молекулярная физика и термодинамика [Текст]: конспект лекций / В.М. Полунин, Г.Т. Сычев; Курск. гос. техн. ун-т. Курск, 2002. 166… 3. Полунин, В.М. Физика. Основные понятия и законы [Текст]: учеб.-метод.… 4. Трофимова, Т.И. Курс физики [Текст]: учеб. пособие для вузов / Т.И. Трофимова. 7-е изд., стер. М.: Высш. шк.,…Дополнительный
7. Волькенштейн, В.С. Сборник задач по общему курсу физики [Текст] / В.С. Волькенштейн. Изд. доп. и перераб. СПб.: СпецЛит, 2002. 327 с. 8. Трофимова, Т.И. Сборник задач по курсу физики для втузов [Текст] / Т.И.… 9. Чертов, А.Г. Задачник по физике [Текст]: учеб. пособие для втузов / А.Г. Чертов, А.А. Воробьев. 7-е изд., перераб.…Приложение 1
Физические основы механики. Основные понятия, определения и законы
Кинематика и динамика
Механическое движение – изменение с течением времени взаимного положения тел или их частей (частиц) в пространстве. Кинематика – раздел механики, в котором изучают геометрические свойства… Физические модели (научные абстракции) классической механики:Среднее ускорение при неравномерном движении
Принцип относительности Галилея (в классической механике) – никакие опыты, проводимые в инерциальных системах отсчета с механическими приборами, не… Преобразования Галилея определяют положение произвольной материальной точки в… r = r' + r0 = r' + vot; t = t',Скорость центра масс
где – полный импульс системы. Импульс p (количество движения) – физическая величина, описывающая свойства… p =mv.В случае переменной массы
где – реактивная сила. При движении по кривой результирующая сила может быть разложена на две… ; ,В векторной форме
где m – масса материальной точки; v – скорость материальной точки; l – плечо (кратчайшее расстояние от направления импульса до оси вращения).В векторной форме
Главный или результирующий момент сил относительно неподвижной оси вращенияравен векторной сумме моментов слагаемых сил: . Моменты сил относительно осей, которые перпендикулярны и параллельны оси вращения, равны нулю.Период колебаний крутильного маятника
где Iz – момент инерции тела относительно оси колебаний. Затухающие (свободные) колебания –движения реальной колебательной системы,…Добротность колебательной системы
где Ne – число колебаний за то время, за которое амплитуда колебаний уменьшается в «е» раз. Вынужденные колебания – колебания, совершаемые системами под действием внешней… f = F0×cos w t,Волновые процессы. Акустика
Фронт волны (волновой фронт) – геометрическое место точек, до которых доходят волны за некоторый промежуток времени t. Волновая поверхность – геометрическое место точек, колеблющихся в одинаковой… Основное свойство волн, независимо от их природы, – перенос энергии без переноса вещества в пространстве.Скорость распространения стоячей волны
где L – некоторое расстояние, на котором наблюдается стоячая волна; n – число узлов; n – частота колебаний.Скорость звука в газах
где p – давление газа, не возмущенного волной; r – плотность газа, не возмущенного волной; – отношение молярной теплоемкости газа при постоянном давлении к теплоемкости газа при постоянном объеме.Энергия, работа, мощность. Законы сохранения в механике
Изменение энергии при переходе системы из одного состояния в другое равно работе, совершаемой системой в процессе перехода: DW = W1 – W2 = A. Диссипация (рассеяние) энергии механических систем –процесс перехода части их механической энергии в другие формы под…В общем случае связь между напряженностью и потенциалом поля тяготения выражается соотношением
Потенциальная энергия тяготеющих масс . Потенциальная энергия системы «тело – Земля», если тело находится на некоторой высоте h над поверхностью Земли:В векторной форме
где Wp = f (x,y,z) – потенциальная энергия системы. Признак устойчивого равновесия (положения) системы– минимум потенциальной… ; .Мгновенная мощность при вращательном движении
где M – мгновенный момент силы; ω – мгновенная угловая скорость. Закон сохранения энергии в его общефизическом смысле – энергия никогда не исчезает и не появляется вновь, она лишь…Поле тяготения. Движение в поле центральных сил
Напряженность поля тяготения – векторная физическая величина, равная по величине и направлению силе, действующей на единичную массу, помещенную в… . Ускорение, приобретаемое в поле тяготения массой m, направлено к центру большей массы:Ускорение свободного падения вблизи поверхности Земли
Ускорение силы тяжести при круговой траектории движения является центростремительным: . Потенциал поля тяготения – это скалярная физическая величина, равная потенциальной энергии единичной массы, помещенной…В векторной форме
Знак «минус» означает, что напряженность поля тяготения направлена в сторону уменьшения потенциала поля тяготения. Уравнение движения массы m в поле тяготения при скорости движения тела v0… .Основы релятивистской механики
Специальная (частная) теория относительности (СТО) изучает свойства пространства-времени, справедливые с той точностью, с какой можно пренебрегать… Общая теория относительности (ОТО)– теория тяготения, изучающая свойства… Симметрия (инвариантность) законов физики– неизменность законов физики, устанавливающих соотношение между величинами,…Ускорение в четырехмерной системе отсчета
Кинематические уравнения движения в четырехмерной системе отсчета(по известному а(t) можно найти v(t) и S(t)): , . Формулы преобразования координат при переходе из одной системы отсчета в другую (преобразования Г.А. Лоренца):Зависимость массы от скорости
 ,
,
где m – масса движущегося тела;
m0 – масса покоя.
Кинетическая масса
где m – релятивистская (полная) масса; m0 – масса покоя; mк – кинетическая масса.Импульс (вектор энергии-импульса) материальной точки
где m0 – масса тела в той системе отсчета, по отношению к которой тело покоится (масса покоя); v –скорость тела. Второй закон Ньютона (уравнение движения материальной точки) в специальной теории относительности:Кинетическая энергия тела
Полная энергия тела складывается из внутренней энергии и кинетической энергии тела как целого: , где – релятивистская масса.Приложение 2
Основы молекулярной физики и термодинамики. Основные понятия, определения и законы
Конденсированное состояние. Кинематика и динамика жидкостей
Чистые жидкости по химическому составу – однокомпонентные жидкости. Жидкие смеси (растворы) по химическому составу – двух- или многокомпонентные… Нормальные (обычные) жидкости – однородные макроскопические и изотропные жидкости. При отсутствии внешних воздействий…Основные понятия, определения и законы молекулярной физики и термодинамики
Молекулярная физика – раздел физики, в котором изучаются физические свойства и строение вещества в различных агрегатных состояниях на основе их микроскопического (молекулярного) строения.
Молекулярно-кинетическая теория строения вещества – раздел молекулярной физики, в котором изучаются свойства тел на основе представлений об их молекулярном строении.
Статистическая физика – раздел молекулярной физики, в котором изучаются свойства и движения не отдельных молекул (частиц), а совокупности частиц, характеризующихся средними величинами.
Термодинамика – наука, в которой изучаются свойства физических систем вне связи с их микроскопическим строением.
Молекула – наименьшая часть вещества, обладающая его основными химическими свойствами и состоящая из атомов, соединенных между собой химическими связями.
Атом – наименьшая частица химического элемента (микрочастица), обладающая его свойствами. Атомы в разных сочетаниях входят в состав молекул разных веществ.
Относительная атомная масса – отношение массы данного атома к 1/12 массы изотопа углерода с массовым числом 12 (12С).
Относительная молекулярная масса – отношение массы данной молекулы к 1/12 массы атома 12С.
Моль – количество вещества, в котором содержится число частиц, равное числу атомов в 0,012 кг изотопа углерода С12.
Число Авогадро – число атомов или молекул в моле любого вещества: NА = 6,02×1023 моль-1.
Молярная масса – масса вещества, взятого в количестве одного моля:
m = m0×NА.
Идеальный газ – теоретическая модель газа, в которой не учитывается взаимодействие его частиц (средняя кинетическая энергия частиц много больше энергии их взаимодействия). Размеры молекул идеального газа малы по сравнению с расстояниями между ними. Суммарный собственный объем молекул такого газа мал по сравнению с объемом сосуда. Силы взаимодействия между молекулами настолько малы, что движение молекул от столкновения до столкновения происходит по прямолинейным отрезкам. Число ежесекундных столкновений молекул велико.
Основные положения молекулярно-кинетической теории идеального газа:
1) газ состоит из мельчайших частиц – атомов или молекул, находящихся в непрерывном движении;
2) в любом, даже очень малом объёме, к которому применимы выводы молекулярно–кинетической теории, число молекул очень велико;
3) размеры молекул малы по сравнению с расстояниями между ними;
4) молекулы газа свободно движутся между двумя последовательными взаимодействиями друг с другом или со стенками сосуда, в котором он находится. Силы взаимодействия между молекулами, кроме моментов соударения, пренебрежимо малы. Соударения молекул происходят без потерь механической энергии, т.е. по закону абсолютно упругого взаимодействия;
5) при отсутствии внешних сил молекулы газа распределяются равномерно по всему объёму;
6) направления и значения скоростей молекул газа самые различные.
Основное уравнение молекулярно-кинетической теории газов:
 ,
,
где  – средняя квадратичная скорость.
– средняя квадратичная скорость.
Основное уравнение молекулярно-кинетической теории газов для давления:
 , или
, или  ,
,
где n0 – N'/V – число молекул в единице объема;
 – средняя кинетическая энергия поступательного движения молекул газа;
– средняя кинетическая энергия поступательного движения молекул газа;
k – постоянная Больцмана.
Закон Авогадро: «В одинаковых объемах при одинаковых температурах и давлениях содержатся одинаковые количества молекул».
Закон Дальтона: «Давление смеси газов равно сумме парциальных давлений, т.е. тех давлений, которые имел бы каждый из входящих в смесь газов, если бы в объеме, занятом смесью, находился он один»:
 .
.
Уравнение состояния идеальных газов для произвольной массы m (уравнение Менделева–Клапейрона):
 ,
,
где R – газовая постоянная, которая численно равна работе расширения одного моля газа при его нагревании на один градус в условиях постоянного давления;
T – абсолютная температура.
Степени свободыi – число независимых координат, необходимых для полного описания положения системы в пространстве. Все степени свободы равноправны.
Общее число степеней свободы
где – число степеней свободы поступательного движения; – число степеней свободы вращательного движения; – число степеней свободы колебательного движения;Статистический метод исследования
Вероятность термодинамическая – число способов, которыми может быть реализовано данное состояние макроскопической физической системы (предел, к… w = n/N, где N – число опытов;Средняя арифметическая скорость
Относительная скорость применяется для расчета числа молекул, движущихся со скоростями в интервале от v до v + dv: u = v/vв. Закон распределения молекул идеального газа по скоростям в стационарном состоянии (распределение Максвелла):Основы термодинамики
Математически первое начало термодинамики можно записать так: dU = dQ – dA + dM, где dU – изменение внутренней энергии системы;Полный дифференциал энтальпии (при неизменных N и x) имеет вид
Связь энтальпии с температурой, объемом и теплоемкостью (при постоянном давлении) системы: ; ; Cp = (dH/dt). Изменение энтальпии (DH) равно количеству теплоты, которое сообщают системе или отводят от нее при постоянном…Реальные газы. Фазовые равновесия и превращения
Уравнение состояния реальных газов (уравнение Ван-дер-Вааль-са) для произвольной массы газа: , где а – поправка Ван-дер-Ваальса на влияние сил межмолекулярного взаимодействия (на внутреннее давление);Внутренняя энергия одного моля реального газа
Изменение температуры реального газа при адиабатическом расширении (при этом газ охлаждается) или сжатии (при этом газ нагревается): . Эффект Джоуля–Томсона – изменение температуры реального газа при расширении через пористую перегородку. При этом, если…Кинетические явления
Кинетические явления в молекулярной физике – вязкость, теплопроводность, диффузия. Вязкость (внутреннее трение) – явление переноса, в результате которого… Сила внутреннего трения в жидкости или газе определяется по формуле Ньютона:Приложение 3
Физические величины
Основные физические постоянные (округленные значения) Физическая постоянная Обозначение Значение Ускорение … Таблица П3.2 Плотность некоторых газов (при нормальных условиях) Газ Плотность, кг/м3 Газ …Приложение 4
Правильные ответы на тестовые задания
Физические основы механики
№ задания Ответ № задания Ответ № задания Ответ № задания Ответ … Основные понятия, определения и законы классической динамики № … № задания Ответ № задания Ответ № задания Ответ № …Основы молекулярной физики и термодинамики
Основные представления и законы молекулярно-кинетической теории № задания Ответ № задания Ответ № … № задания Ответ № задания Ответ … Основные положения и законы термодинамики № задания Ответ № задания Ответ №…Физические основы механики. Молекулярная физика и термодинамика
Сборник тестовых заданий– Конец работы –
Используемые теги: Федеральное, Агентство, образованию0.051
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Федеральное агенТство по образованию
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.173 сек.
Новости и инфо для студентов