Краткие теоретические сведения
Передачей называют механизм, передающий движение от одного элемента к другому (с вала на вал), или преобразующий один вид движения в другой.
В металлорежущих станках для передачи вращательного движения применяют ременные, цепные, зубчатые и другие передачи; для сообщения узлам станков поступательного движения – кинематическую пару «винт-гайка», реечную передачу и другие механизмы. Требования ЕСКД предусматривают условные обозначения элементов в кинематических схемах (ГОСТ 2.770-68), наиболее часто встречающиеся из которых приведены в табл. 1.1.
Таблица 1.1
Условные обозначения элементов в кинематических схемах
| Наименование | Обозначение | |
| Вал, валик, ось, стержень, шатун и т.п. | 
| |
| Неподвижное звено (стойка). Для указания неподвижности любого звена часть его контура покрывают штриховкой. | 
| |
| Неподвижное соединение детали с валом, стержнем | 
| |
| Подшипники на валу (без уточнения типа): радиальные упорные |


| |
| Муфты: общее обозначение без уточнения типа сцепляемая (управляемая) упругая фрикционная конусная кулачковая (зубчатая) односторонняя кулачковая (зубчатая) двухсторонняя |




| |
| Звено рычажных механизмов двухэлементное: ползун кулиса |


| |
| Храповые зубчатые механизмы: с наружным зацеплением односторонние с наружным зацеплением двусторонние |  
| |
| Шкив ступенчатый, закрепленный на валу | 
| |
| Передача ременная (без уточнения типа ремня) | 
| |
| Передачи зубчатые (цилиндрические): внешнее зацепление (общее обозначение без уточнения типа зубьев) внутреннее зацепление | 

| |
| Передачи зубчатые с пересекающимися валами и конические (общее обозначение без уточнения типа зубьев) | 
| |
| Окончание табл. 1.1. | ||
| Передачи зубчатые со скрещивающимися валами: червячные с цилиндрическим червяком | 
| |
| Передачи зубчатые реечные (общее обозначение без уточнения типа зубьев) | 
| |
| Кинематическая пара «винт-гайка»: гайка на винте, передающем движение: неразъемная разъемная |
| |
| Вал с концевой частью под съемную рукоятку | 
| |
| Электродвигатель | 
|
В механизмах станков используются следующие виды соединений деталей (зубчатых колес, полумуфт и др.) с валом:
неподвижное (рис. 1.1, а) – зубчатое колесо жестко связано с валом;
свободное при вращении (рис. 1.1, б) – зубчатое колесо и вал вращаются независимо друг от друга, и колесо не может перемещаться вдоль вала;
| 
|
| а | б |
Рис. 1.1. Виды соединений зубчатых колес с валами:
а – неподвижное соединение; б – свободное при вращении
подвижное без вращения – зубчатое колесо вращается вместе с валом (рис. 1.2) и может перемещаться по шлицам или по шпонке вдоль вала. Например, за счет перемещения блока зубчатых колес (тройного блока из шестерен z1, z2, z3) возможны следующие три варианта передачи вращения от вала I к валу II: блок будет смещен влево – в зацеплении будут находиться зубчатые колеса z1-z4; если блок находится в центральном положении – z2-z5; если блок смещен вправо, тогда шестерня z3 будет вращать шестерню z6;
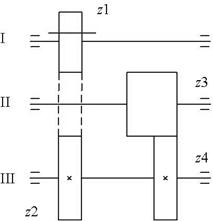
при помощи вытяжной шпонки (рис. 1.3), которая может соединить с валом I только одну шестерню из трех (z1, z2, z3), остальные две вращаются на валу I свободно. На валу II шестерни закреплены неподвижно.

| 
|
| Рис 1.2. Схема механизма передачи вращения от вала I на вал II с помощью подвижного блока из трех зубчатых колес (вдоль вала I по шпонке) | Рис. 1.3. Схема механизма передачи вращения на вал II с помощью блока из трех зубчатых колес, соединяемых с валом I вытяжной шпонкой |
Изменяя положение шпонки, можно обеспечить три различных частоты вращения вала II, используя следующие варианты зацепления зубчатых колес: z1-z4, z2-z5 или z3-z6.
При составлении кинематических схем необходимо соблюдать следующие правила:
– шестерни, входящие в зацепление при переключении зубчатых передач, должны на схеме касаться друг друга своими диаметрами (см. рис. 1.2);
– на плоской развертке пространственной кинематической схемы зацепления между шестернями, насаженными на валы и расположенными в разных параллельных плоскостях, обозначаются пунктирными линиями. Например, в реверсивном механизме (рис. 1.5) передача вращения с вала I на вал III, который в действительности не располагается в плоскости схемы, осуществляется непосредственно через зубчатые колеса z1-z2 при левом фиксированном положении колеса z1.
В механизмах металлорежущих станков для реверсирования вращения валов, т. е. изменения направления вращения, используются реверсивные механизмы различной конструкции. Принцип работы их, чаще всего, основан на изменении количества последовательно зацепленных шестерен в кинематической цепи. Первая и последняя шестерни такого механизма будут вращаться в одну сторону только при нечетном количестве последовательно зацепленных колес, а в разные стороны – только при четном (рис. 1.4).
 Нечетное Четное Нечетное Четное
| 
|
| Рис. 1.4. Кинематическая схема реверсивного механизма с «паразитной» шестерней («трензель») | Рис. 1.5. Кинематическая схема реверсивного механизма с широкой шестерней на промежуточном валу |
Этот принцип реализуется и в реверсивном механизме, схема которого приведена на рис. 1.5: при левом фиксированном положении шестерни z1 на валу I – вращение вала I на вал II передается через две шестерни (четное количество). При правом фиксированном положении шестерни z1 – вращение вала I на вал II передается через три шестерни (нечетное количество – z1-z3-z4).
Линейная скорость точки на делительной окружности шестерен, находящихся в зацеплении равна V = πD1n1 = πD2n2 = πmz1n1 = πmz2n2, так как диаметр делительной окружности зубчатого колеса равен произведению его модуля m на число зубьев z ( ). Отсюда:
). Отсюда:
| n2/n1 = D1/D2 = z1/z2, | (1.1) |
Отношение частоты вращения ведомого вала n2 к частоте вращения ведущего вала n1 называется передаточным отношением i, которое определяется по формуле:
для ременной передачи –
 ; ;
| (1.2) |
зубчатой –
 ; ;
| (1.3) |
червячной –
 , ,
| (1.4) |
где i – передаточное отношение;
D1, D2 – диаметры ведущего и ведомого шкива ременной передачи соответственно;
z1, z2 – число зубьев ведущего и ведомого колеса соответственно;
k – число заходов червяка;
zч.к – число зубьев червячного колеса.
Для преобразования вращательного движения в поступательное, служат реечная и винтовая («винт-гайка») передачи и другие механизмы.
Перемещение рейки или реечного зубчатого колеса при неподвижной рейке за один оборот реечного колеса (ход реечного колеса по рейке) рассчитывается по следующей формуле, мм:
| So = πd = πmzр.ш, | (1.5) |
где m – модуль реечной (зубчатой) передачи, мм;
| ;
| (1.6) |
zр.ш – число зубьев реечной шестерни;
d – диаметр делительной окружности реечной шестерни, мм.
Перемещение гайки за один оборот винта (ход винтовой передачи), мм:
 , ,
| (1.7) |
где tх.в – шаг ходового винта, мм;
k – число заходов винта.
Приводом станка называют комплекс механизмов, передающих движение от источника (электродвигателя, приводного вала) к рабочим органам станка.
Совокупность всех передач передающих вращение от источника на исполнительный механизм называется кинематической цепью. Общее передаточное отношение кинематической цепи iоб равно произведению передаточных отношений отдельных ее звеньев (передач):
| iоб = i1i2 … in, | (1.8) |
где i1, i2, …, in – передаточные отношения отдельных звеньев (передач), входящих в состав кинематической цепи.
Частота вращения шпинделя (полый вал, на котором с помощью приспособления крепится деталь на токарных или инструмент на сверлильно-расточных и фрезерных станках) определяется по формуле:
 , ,
| (1.9) |
где nшп – частота вращения шпинделя, об/мин;
nэд – частота вращения вала электродвигателя, об/мин.
Скорость перемещения гайки по ходовому винту для винтовой передачи (подача за минуту или минутная подача), мм/мин:
 , ,
| (1.10) |
где nх.в – частота вращения ходового винта, об/мин.
Скорость перемещения рейки (реечной шестерни по рейке), мм/мин:
 , ,
| (1.11) |
где nр.ш – частота вращения реечной шестерни, об/мин.