рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Теоретическая механика
Реферат Курсовая Конспект
Теоретическая механика
Теоретическая механика - раздел Механика, Раздел I ...
РАЗДЕЛ I
Теоретическая механика
Введение
Любое явление в окружающем нас макромире связано с движением, следовательно, не может не иметь того или иного отношения к механике.
Механика — это наука о механическом движении и взаимодействии материальных тел. Теоретическая механика — раздел механики, в котором изучаются законы движения тел и общие свойства этих движений.
Механическое движение — это изменение с течением времени взаимного положения в пространстве материальных тел или взаимного положения частей данного тела. Покой есть частный случай механического движения, причем понятия покоя и механического движения являются относительными. Так, человек, сидящий в вагоне равномерно и прямолинейно движущегося поезда, может считать себя находящимся в покое по отношению к вагону, однако по отношению к Земле он будет находиться в движении.
Механика является одной из самых древних наук. Термин «механика» (в пер. «искусство построения машин») введен выдающимся философом древности Аристотелем.
Техническая механика — комплексная дисциплина, в которой излагаются основные положения о взаимодействии твердых тел, прочности материалов и методах расчета конструктивных элементов зданий и сооружений на внешние воздействия, так как с древних времен строители и архитекторы старались возводить прочные и надежные здания. Она включает три раздела: «Теоретическая механика», «Сопротивление материалов», «Детали машин». «Теоретическая механика» — раздел, в котором излагаются основные законы движения твердых тел и их взаимодействия. В разделе «Сопротивление материалов» изучаются основы прочности материалов и методы расчетов элементов конструкций на прочность, жесткость и устойчивость под действием внешних сил. В заключительном разделе «Технической механики» «Детали машин» рассматриваются основы конструирования и расчета деталей и сборочных единиц общего назначения.
Дисциплина «Техническая механика» является общепрофессиональной, обеспечивающей базовые знания при усвоении специальных дисциплин.
СТАТИКА
Основные понятия статики
Для удобства изучения теоретическую механику подразделяют на статику, кинематику и динамику.
Статикой называется раздел механики, посвященный изучению условий равновесия абсолютно твердых тел под действием сил. Состояние покоя или равномерного прямолинейного поступательного движения тела по отношению к другим материальным телам называется равновесием. Абсолютным механическим равновесием считаться такое состояние, когда тело находиться в покое или движется прямолинейно и равномерно, причем все точки тела движутся одинаково. В статике изучается только абсолютное равновесие тел. Тело, по отношению к которому рассматривается равновесие других тел, называется телом отсчета.
В статике рассматриваются решения двух основных задач:
1) приведение системы сил, действующих на абсолютно твердое тело, к простейшему виду;
2) определение условий равновесия абсолютно твердого тела под действием произвольной системы сил.
Тело называют абсолютно твердыми (или абсолютно жесткими), если расстояние между любыми его точками не меняется при действии на него других тел. Абсолютно твердых тел в природе не существуют, все реальные тела под действием различных внешних факторов изменяют свою форму м размеры, т.е. деформируются. Абсолютно твердое тело представляет собой неизменяемую систему материальных точек. Под материальной точкой в теоретической механике понимают твердое тело, размерами можно пренебречь, но обладающая массой.
Рассматривая какое – нибудь тело, нельзя представить его изолированно, вне влияния на него других тел. Проявлением этого взаимного влияния тел является силы. Сила — это мера механического взаимодействия материальных тел между собой. Взаимодействие характеризуется величиной и направлением, т.е. сила есть величина векторная, характеризующаяся точкой приложения (А), направлением (линией действия), величиной (модулем) (рис. 1.1).
Силу измеряют в ньютонах(Н): Ньютон есть сила, сообщающая телу массой 1 кг ускорение 1 м/с² в направлении действия силы.
 мега(М)………
мега(М)………  деци(д)…………...
деци(д)…………...
кило(К)………... санти(с)………….
санти(с)…………. ,
,
гекто(г)………...10² мили (м)………… ,
,
дека(да)…………10; микро(мк)………..
Например, килоньютон (кН) = кН.
Рис. 1.1
Силы, действующие на тело (или систему тел), делятся на внешние и внутренние. Внешние силы бывают активные и реактивные. Активные силы вызывают перемещение тела, реактивные стремятся противодействовать перемещению тела под действием внешних сил.
Внутренние силы возникают в теле под действием внешних сил.
Совокупность сил, действующих на какое-либо тело, называют системой сил. Система сил, линии действия которых лежат в разных плоскостях, называют пространственной. Если же линии действия рассматриваемых сил лежат в одной плоскости, система называется плоской. Система сил с пересекающимися в одной точке линиями действия называется сходящейся. Сходящаяся система может быть как пространственной, так и плоской.
Две системы сил эквивалентны, если взятые порознь они оказывают одинаковое механическое действие на тело. Из этого следует, что две системы сил, эквивалентные третьей, эквивалентные между собой. Любую сложную систему сил всегда можно заменить более простой эквивалентной ей системой сил. Одну силу, эквивалентную данной системе сил, называют равнодействующей этой системы. Силу, равную по модулю равнодействующей и направленную по той же линии действия, но в противоположную сторону, называют уравновешивающей силой. Если к системе сил добавлена уравновешивающая сила, то полученная новая система находиться в равновесии и соответственно равна нулю.
Аксиомы статики
Аксиома I(аксиома инерции, или первый закон Ньютона). Всякое тело сохраняет свое состояние покоя или прямолинейного равномерного движения до тех… Способность материального тела сохранять движение при отсутствии действующих… В соответствии с этой аксиомой состоянием равновесия считается такое состояние, когда тело находиться в покое или…Связи и реакции связей
Все тела делятся на свободные и связанные. Свободным называется тело, которое не испытывает никаких препятствий для… При взаимодействии между телом и его связями возникают силы, противодействующие возможным движениям тела. Эти силы…Плоская система сходящихся сил
Определение равнодействующей геометрическим способом
Уметь определять равнодействующую, решать задачи на равновесие в геометрической форме. Система сил, линии действия которых лежат в одной плоскости и все… Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3; …; Fn), n — число сил, входящих в…Равнодействующая сходящихся сил
рис.1.12Определение равнодействующей аналитическим способом
Знать аналитический способ определения равнодействующей силы, условия плоской сходящихся системы сил в аналитической форме.
Уметь определять проекции силы на две взаимно перпендикулярные оси, решать задачи на равновесие в аналитической форме.
Проекция силы на ось
Определение равнодействующей системы сил аналитическим способом
Условия равновесия плоской системы сходящихся сил в аналитической форме
FΣ = 0. Условия равновесия в аналитической форме можно сформулировать следующим образом:Методика решения задач
Первый этап: Отбрасываем внешние связи системы тел, равновесие которой рассматривается, и заменяем их действие реакциями. Необходимость этого… Второй этап: Расчленяем систему тел на отдельные элементы. Это дает нам… Третий этап: Составляем условия равновесия для каждого отдельного элемента, из которых находим искомые неизвестные…Пара сил и момент силы относительно точки
Уметь определять моменты пар сил и момент силы относительно точки, определять момент результирующей пары сил. Две равные и параллельные силы, направленные в противоположные стороны и не… Действие пары сил на твердое тело, как показывает опыт, состоит в том, что она стремиться вращать это тело. Рассмотрим…Эквивалентность пар
Эффект действия пары сил на твердое тело не зависит от ее положения в плоскости. Таким образом, пару сил можно переносить в плоскости ее действия в… Рассмотрим еще одно свойство пары сил, которое является основой для сложения… Не нарушая состояния тела, можно как угодно изменять модули сил и плечо пары, только бы момент пары оставался…Опоры и опорные реакции балок
Шарнирно-подвижная опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. Если пренебречь трением на… Шарнирно-неподвижная опора допускает только поворот вокруг оси шарнира и не… Жесткая заделка (защемление) не допускает ни линейных перемещений, ни поворотов защемленного конца балки. Жесткую…Тема 1.6 Плоская система произвольно расположенных сил
Иметь представление о главном векторе, главном моменте, равнодействующей плоской системы произвольно расположенных сил.
Знать теорему Пуансо о проведении силы к точке, приведение произвольной плоской системы сил к точке, три формы уравнений равновесия.
Уметь заменять произвольную плоскую систему сил одной силой и одной парой.
Приведение силы к точке.
Возьмем силу , приложенную в точке С. Требуется перенести эту силу параллельно самой себе в некоторую точку О. Приложим в точке О две силы и , противоположно направленные, равные по… Таким образом, при приведении силы к точке, не лежащей на линии действия силы, получается эквивалентная система,…Приведение плоской системы сил к данной точке
рис.1.24 . Сходящиеся в точке силы можно заменить одной силой равной геометрической сумме составляющих,Влияние точки приведения
При изменении положения точки приведения величина главного вектора не измениться. Величина главного момента при переносе точки приведения измениться, т.к.… Для того чтобы оказываемое ею на тело действие не изменилось, нужно к нему приложить пару с моментом, равным моменту…Теорема о моменте равнодействующей (теорема Вариньона)
Было показано, что можно выбрать центр приведения (рис. 1.25, точка С),…Условие равновесия произвольно плоской системы сил
где - проекция векторов на оси координат. 2) Поскольку точка приведения выбрана произвольно, ясно, что при равновесии сумма моментов сил системы относительно…Балочные системы. Определение реакций опор и моментов защемления
Знать три формы уравнений равновесия и уметь их использовать для определения реакций в опорах балочных систем. Уметь выполнять проверку правильности решения. Очень часто в машинах и конструкциях встречаются тела удлиненной формы, называемыми балками (или балочными системами).…Виды нагрузок
Часто нагрузка распределена по значительной площадке или линии (давление воды на плотину, давление снега на крышу и т.п.), тогда нагрузку считают… Взадачах статики для абсолютно твердых тел распределенную нагрузку можно… Рис. 1.26Тема 1.7 Пространственная система сил
Знать момент силы относительно оси, свойства момента, аналитический способ определения равнодействующей, условия равновесия пространственной системы сил.
Уметь выполнять разложение силы на три взаимно перпендикулярные оси, определять момент силы относительно оси.
Пространственная система сил – система сил, линии действия которых не лежит на одной плоскости.
Момент силы относительно точки
Запишем момент этой силы относительно точки 0:, будет положительным, если при наблюдении со стороны положительного конца оси z сила Fxy будет… Таким образом, момент силы относительно оси будет равен моменту проекции этой…Вектор в пространстве
где Fx = F cos αx; Fн = F cos αy; Fя = F cos αzПроизвольная пространственная система сил
Приведение произвольной пространственной системы сил к центру О
Силы необходимо параллельно перемещать, при этом образуется система пар сил. Момент каждой из этих пар равен произведению модуля силы на расстояние… В центре приведения возникает пучок сил, который может быть заменен суммарной… Моменты пар сил можно сложить, получив суммарный момент системы Мгл (главный момент).Уравнение равновесия пространственной системы сил
При равновесии Fгл = 0; Мгл = 0. Получаем шесть уравнений равновесия:
Шесть уравнений равновесия пространственной системы сил соответствуют шести независимым возможным перемещениям тела в пространстве: трем перемещениям вдоль координатных осей и трем вращениям вокруг этих осей.
Тема 1.8 Центр тяжести
Иметь представление о системе параллельных сил и центре системы параллельных сил, о силе тяжести и центре тяжести.
Знать методы для определения центра тяжести тела и формулы для определения положения центра тяжести плоских фигур.
Уметь определять положение центра тяжести простых геометрических фигур, составленных из стандартных профилей.
КИНЕМАТИКА
Тема 2.1 Основные понятия кинематики. Кинематика точки
Иметь представление о пространстве, времени, траектории, пути, скорости и ускорении.
Знать способы задания движения точки (естественный и координатный).
Знать обозначения, единицы измерения, взаимосвязь кинематических параметров движения, формулы для определения скорости и ускорений (без вывода).
Уметь определять параметры движения точки; строить и читать кинематические графики
Кинематика – часть теоретической механики, в которой изучается движение материальных тел без учета их масс и действующих на них сил. Кинематика рассматривает движение как перемещение в пространстве. Причины, вызывающие движение, не рассматриваются. Кинематика устанавливает способы задания движения и определяет методы определения кинематических параметров движения.
Когда в механике говорят о движении тела, то подразумевают под этим изменение с течением времени его положения в пространстве по отношению к другим телам. Обычно тело, по отношению к которому изучают движение, связывают с какой – нибудь системой координат. Эту систему координат вместе с выбранным способом измерения называют системой отсчета.Если координаты всех точек тела в выбранной системе отсчета остаются все время неизменными, то тело находится в покое. Если рассматривается движение тела по отношению к условно неподвижной системе отсчета, то движение называют абсолютным; движение тела по отношению к подвижной системе отсчета называют относительным.
Положение тел в пространстве меняется с течением времени, причем время не засвистит от выбранной системы отсчета, т.е является независимой переменной. Все остальные переменные величины (расстояние, скорость, ускорение) являются функциями времени. За единицу времени в системе СИ принята секунда (с), а за единицу длины – метр (м).
Время отсчитывается от некоторого, заранее выбранного начального момента (t=0). Число единиц времени, прошедших от начального момента до данного мгновения, называют моментом времени t. Промежуток времени Δt=  определяется числом единиц времени, прошедших от более раннего момента времени
определяется числом единиц времени, прошедших от более раннего момента времени  до более позднего
до более позднего . Промежуток скорости:
. Промежуток скорости:  ;
;
Некоторые определения теории механизмов и машин
Механизмом называется совокупность связанных между собой тел, совершающих определенные движения. Механизмы служат для передачи или преобразования… Машина есть механизм или сочетание механизмов, осуществляющих определенные… 1) для преобразования энергии (энергетические машины);Три способа задания движения точки. Основные кинематические параметры
Знание законов движения тела означает знание законов движения каждой его точки, поэтому изучение кинематики начнем с изучения движения геометрической точки.
Траекторией точки называется множество (геометрическое место) положений движущейся точки в рассматриваемой системе отсчета. В зависимости от формы траектории движение точки бывает двух видов: прямолинейное и криволинейное.
Естественный способ заключается в том, что движение точки задается ее траекторией, началом отсчета и уравнением движения по этой траектории (законом движения). В общем виде уравнение движения записывается следующим образом:
s=f(t)
где s — расстояние точки от начального положения, являющееся функцией времени; t — время движения точки от начального момента.
Зная траекторию точки и уравнение движения по этой траектории, можно определить положение точки в любой момент времени, подставив время в равенство s=f(t).
При своем движении точка проходит некоторый путь, также являющийся функцией времени. Следует подчеркнуть, что путь, пройденный точкой, совпадает с расстоянием от начала отсчета лишь тогда, когда точка все время движется в одном направлении и начало ее движения совпадает с началом отсчета.
Координатный способ заключается чается в том, что движение точки задается движением ее проекций вдоль осей координат (рис. 2.2). Уравнения плоского движения точки в координатной форме записываются следующим образом: 
 рис. 2.2
рис. 2.2
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью.
Скорость – вектор, в любой момент направленный по касательной к траектории в сторону направления движения. u=st=const (предполагается, что начала отсчета пути и времени совпадают). Единица скорости = метр в секунду = м/с.
Скорость есть величина векторная. При прямолинейном равномерном движении скорость постоянна и по модулю, и по направлению, а вектор ее совпадает с траекторией (рис. 2.3, а).
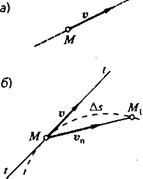 При криволинейном движении скорость точки меняется по направлению (рис. 2.3, б). Для того чтобы установить направление вектора скорости, разобьем траекторию на бесконечно малые участки пути Δs, которые можно считать прямолинейными в силу их малости. Тогда на каждом участке условная скорость vn такого прямолинейного движения будет направлена вдоль хорды. В пределе при Δs, стремящемся к нулю, хорда совпадает с касательной, следовательно, скорость в каждый момент времени направлена по касательной к траектории в сторону движения (см. рис. 2.3, б).
При криволинейном движении скорость точки меняется по направлению (рис. 2.3, б). Для того чтобы установить направление вектора скорости, разобьем траекторию на бесконечно малые участки пути Δs, которые можно считать прямолинейными в силу их малости. Тогда на каждом участке условная скорость vn такого прямолинейного движения будет направлена вдоль хорды. В пределе при Δs, стремящемся к нулю, хорда совпадает с касательной, следовательно, скорость в каждый момент времени направлена по касательной к траектории в сторону движения (см. рис. 2.3, б).
При неравномерном движении точки модуль ее скорости меняется. Представим себе точку, движение которой задано естественным способом уравнением s=f(t). Если за небольшой промежуток времени Δt точка прошла
путь Δs, то ее средняя скорость  .
.
рис.2.3
Ускорение точки
направлению, называется ускорением точки (рис.2.4). Скорость точки при перемещении из точки М1 в точку М2 меняется по величине и… Среднее значение ускорения за этот промежуток времени:Ускорение точки при криволинейном движении
Вектор приращения (изменения) скорости обозначим Δv, тогда . Для нахождения вектора Av перенесем вектор и, в точку М и построим… аср = Δv/Δt.Виды движений точки в зависимости от ускорений
Равномерное движение
v = const. Для прямолинейного равномерного движения (рис. 2.9, а) Полное ускорение движения точки равно нулю: а = 0.Неравномерное движение
Уравнение неравномерного движения в общем виде представляет собой уравнение третьей S = f(t3) и выше степени. Анализируя формулы касательного и номинального ускорений, можно установить… 1) : движение неравномерное (υconst)криволинейное (ρ);Кинематические графики
Кинематические графики – это изменения пути, скорости и ускорений в зависимости от времени.
Равномерное движение (рис.2.11)
 t ,c
t ,c
рис.2.10
Равнопеременное движение (рис.2.11)
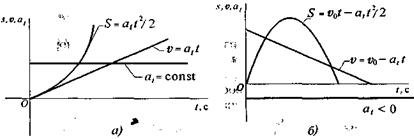
рис.2.11
Тема 2.2 Простейшие движения твердого тела
Знать формулы для определения параметров поступательного и вращательного движений тела. Уметь определять кинематические параметры тела при поступательном и… Поступательным называют такое движение твердого тела, при котором всякая прямая линия на теле при движении остается…Вращательное движение
Вращательное движение в технике встречается весьма часто. В подавляющем большинстве механизмов и машин имеются звенья, которые совершают… Если через ось вращения провести плоскость Р, жестко связанную с телом, то…Частные случаи вращательного движения
ω = const. Уравнение (закон) равномерного вращения в данном случае имеет вид: φ = φ0 + φt,Скорости и ускорения точек вращающегося тела
расстоянии г а от оси вращения (рис. 11.6, 11.7). Рис.2.16Сравнение формул кинематики для поступательного и вращательного движений
 |
Преобразование вращательного движения
Передачи характеризуются передаточным отношением или передаточным числом. Передаточным отношеньем i называется отношение угловой скорости ведущего… Передаточным числом и двух сопряженных звеньев называется отношение большей углевой скорости к меньшей. Передаточное…Сложное движение точки. Сложное движение твердого тела
Иметь представление о системах координат, об абсолютном, относительном и переносном движениях.
Знать разложение сложного движения на относительное и переносное, теорему сложения скоростей.
Знать разложение плоскопараллельного движения на поступательное и вращательное, способы определения мгновенного центра скоростей.
Основные определения
Для рассмотрения сложного движения точки выбирают две системы отсчета: подвижную и неподвижную. Движение точки (тела) относительно неподвижной системы отсчета называют… Подвижную систему отсчета обычно связывают с движущимся телом. Движение подвижной системы отсчета относительно…Плоскопараллельное движение твердого тела
Плоскопараллельное движение можно изучать, рассматривая любое плоское сечение тела, параллельное неподвижной плоскости, называемой основной (рис.… Все точки тела, расположенные на прямой, перпендикулярной к основной… Плоскопараллельное движение…Метод определения мгновенного центра скоростей
Задача сводится к определению положения мгновенного центра вращений (скоростей) (рис.2.21). Мгновенным центром скоростей (МЦС) является точка на плоскости, абсолютная… Вокруг этой точки тело совершает поворот со скоростью ω.ДИНАМИКА
Тема 3.1 Основные понятия и аксиомы динамики. Понятие о трении
Иметь представление о массе тела и ускорении свободного падения, о связи между силовыми и кинематическими параметрами движения, о двух основных задачах динамики.
Знать аксиомы динамики и математическое выражение основного закона динамики.
Знать зависимости для определения силы трения.
Содержание и задачи динамики
Динамика — раздел теоретической механики, в котором; устанавливается связь между движением тел и действующими на них силами.
В динамике решают два типа задач:
— определяют параметры движения по заданным силам;
— определяют силы, действующие на тело, по заданным кинематическим параметрам движения.
При поступательном движении все точки тела движутся одинаково, поэтому тело можно принять за материальную точку.
Если размеры тела малы по сравнению с траекторией, его тоже можно рассматривать как материальную точку, при этом точка совпадает с центром тяжести тела.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
Поэтому динамику делят на динамику точки и динамику материальной системы.
Аксиомы динамики
Законы динамики обобщают результаты многочисленных опытов и наблюдений. Законы динамики, которые принято рассматривать как аксиомы, были сформулированы Ньютоном, но первый и четвертый законы были известны Галилею. Механику, основанную на этих законах, называют классической механикой.
Первая аксиома (принцип инерции)
Всякая изолированная материальная точка находится в состоянии покоя или равномерного и прямолинейного движения, пока приложенные силы не выведут ее из этого состояния.
Это состояние называют состоянием инерции. Вывести точку из этого состояния, т.е. сообщить ей некоторое ускорение, может внешняя сила.
Всякое тело (точка) обладает инертностью. Мерой инертности является масса тела.
Массой называют количество вещества в объеме тела, в классической механике ее считают величиной постоянной. Единица измерения массы — килограмм (кг).
Вторая аксиома (второй закон Ньютона — основной закон динамики)
Зависимость между силой, действующей на материальную точку, и сообщаемым ею ускорением следующая:
F=ma
где т — масса точки, кг; а — ускорение точки, м/с2.
Ускорение, сообщенное материальной точке силой, пропорционально величине силы и совпадает с направлением силы.
Основной закон динамики в дифференциальной форме:
На все тела на Земле действует сила тяжести, она сообщает телу ускорение свободного падения, направленное к центру Земли:
G = mg,
где g — 9,81 м/с² , ускорение свободного падения.
 Третья аксиома (третий закон Ньютона) Силы взаимодействия двух тел равны по величине и направленыпо одной прямой в разные стороны (рис. 13.1):
Третья аксиома (третий закон Ньютона) Силы взаимодействия двух тел равны по величине и направленыпо одной прямой в разные стороны (рис. 13.1):
 .Откуда
.Откуда
 .При взаимодействии ускорения обратно пропорциональны массам. Рис.3.1
.При взаимодействии ускорения обратно пропорциональны массам. Рис.3.1
Четвертая аксиома (закон независимости действия сил) Каждая сила системы сил действует так, как она действовала бы одна.
Ускорение, сообщаемое точке системой сил, равно геометрической сумме ускорений, сообщенных точке каждой силой в отдельности (рис. 3.2):
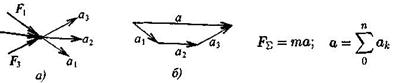
рис.3.2
Тема 3.2 Понятие трения
Трение — это явление сопротивления относительному перемещению, возникающее между двумя телами в зонах соприкасания поверхностей по касательной к… Трение чрезвычайно распространено в природе и имеет большое значение. На… Трение классифицируется по наличию и характеру движения.Трение скольжения
Причина – механическое зацепление выступление выступов. Сила трения есть сила сопротивления относительному перемещению двух тел при… Возьмем тело, лежащее на горизонтальной шероховатой плоскости (рис. 3.3). Сила тяжести G уравновешивается нормальной…Тема 3.3 Движение материальной точки. Метод кинетостатики
Иметь представление о свободных и несвободных материальных точках, о силах инерции, об использовании силы инерции для решения технических задач.
Знать формулы для расчета силы инерции при поступательном и вращательном движениях, знать принцип Даламбера и уметь определять параметры движения с использованием законов динамики и метода кинетостатики.
Свободная и несвободная точки
Материальные точки, движение которых ограничено связями, называются несвободными. Для несвободных точек необходимо определять реакции связей. Эти точки движутся… Несвободные материальные точки освобождаются от связей: связи заменяются их реакциями. Далее несвободные точки можно…Принцип кинетостатики (принцип Даламбера)
Реально силы инерции приложены к телам, связанным с разгоняющимся телом (к связям). Даламбер предложил условно прикладывать силу инерции к активно разгоняющемуся… Принцип Даламбера.Тема 3.4 Работа и мощность
Иметь представление о работе силы при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения силы трения, формулы для расчета работы и мощности при поступательном и вращательном движениях.
Уметь рассчитывать работу и мощность с учетом потерь на трение и сил инерции.
Работа
 Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы».
Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы».
Работа служит мерой действия силы, работа — скалярная величина.
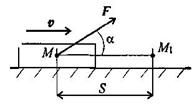
Работа постоянной силы на прямолинейном пути
W = FScosα рис.3.8 Единицы измерения работы: 1 Дж (джоуль)= 1 Н*м; 1 кДж (килоджоуль) = 103 Дж. Рассмотрим частные случаи.Работа постоянной силы на криволинейном пути
Вектор силы можно разложить на две составляющие: F = Ft + Fn.Тема 3.5 Работа и мощность. Коэффициент полезного действия
Иметь представление о мощности при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения мощности при поступательном и вращательном движениях КПД.
Уметь рассчитать мощность с учетом потерь на трение и сил инерции.
Мощность
Мощность — работа, выполненная в единицу времени: . Единица измерения мощности: ватты, киловатты, Мощность при поступательном движении (рис.3.15) , Учитывая, что ,получимКоэффициент полезного действия
Энергия есть общая мера различных форм движения и взаимодействия материи. При передаче или преобразовании энергии, а так же при совершении работы… Относительное количество энергии, используемой в машине по прямому назначению, характеризуется коэффициентом полезного…Тема 3.6 Общие теоремы динамики
Иметь представление о понятиях «импульс» силы», «количества движения», «кинетическая энергия»; о системе материальных точек, о внутренних и внешних силах системы.
Знать основные теоремы динамики, основные уравнения динамики при поступательном и вращательном движениях твердого тела, формулы для расчета моментов инерции некоторых одинаковых элементов твердых тел.
Уметь определять параметры движения с помощью теорем динамики.
Закон изменения количества движения
Вектор количества движения по направлению совпадает со скоростью. Количество… Единица измерения количества движения вМеждународной системе единиц (СИ)Потенциальная и кинитецеская энергия
где G — сила тяжести точки (или тела); Н — высота центра тяжести от нулевого… Кинетическая энергия определяется способностью движущегося тела (или точки) совершать работу. Для материальной точки…Закон изменения кинетической энергии
Рассмотрим случай, когда направление движения совпадает с направлением силы(см. рис. 3.17). Пусть точка под действием силы переместится из положения… где t — время движения. Перемещение точки приложения силы . Работа силы , учитывая, что ее направление совпадает с перемещением, такова:Основы динамики системы материальных точек
Любое материальное тело в механике рассматривается как механическая система, образуемая совокупностью материальных точек. Из определения механической системы следует, что движение каждой из точек,… Силы, действующие на точки системы, делятся на внешние и внутренние. Силы взаимодействия между точками этой системы…Основное уравнение динамики при поступательном движении тела
Для определения движения тела (системы материальных точек) можно использовать второй закон динамики
Fz = mac
где т — суммарная масса тела; ас— ускорение центра масс тела.
Вполе земного притяжения центр масс совпадает с центром тяжести.
Основное уравнение динамики вращающегося тела
Рассматривая твердое тело как механическую систему, разобьем ее на множество материальных точек с массами Δтк. Каждая точка движется по… Используем для каждой точки принцип Даламбера и приложим силы инерции: — касательнуюМоменты инерции некоторых тел
Момент инерции полого тонкостенного цилиндра (рис. 17.5) Jz = mr2. Момент инерции прямого тонкого стержня любого поперечного сечения рис. 3.19 … (относительно zz, рис.3.20.a);РАЗДЕЛ II
Сопротивление материалов
Знать основные понятия, гипотезы и допущения в сопротивлении материалов. «Сопротивление материалов» - это раздел «Технической механики», в котором… Любые создаваемые конструкции должны быть не только прочными и надежными, но не дорогими, простыми в изготовлении и…Тема 4.1 Основные положения. Гипотезы и допущения
Сопротивление материалов есть наука о прочности и деформируемости материалов и элементов машин и сооружений. Прочностью называется способность материала конструкций и их элементов… Выносливость – способность длительное время выдерживать переменные нагрузки.Внешние силы
Силовые нагрузки делят на объемные и поверхностные силы. Объемные или массовые силы — силы, приложение ко всем внутренним точкам тела, к ним… Поверхностная нагрузка, действующая на небольшой площади, условно заменяется… Нагрузка, приложенная на значительной площади, называется распределенной. Мерой такой нагрузки служит ее…Деформации линейные и угловые. Упругость материалов
Для случая малых деформаций произвольное изменение формы и размеров тела можно разложить на изменение линейных и угловых размеров тела. Изменение… Способность деформироваться от внешних воздействий присуща всем твердым телам… Важную роль играет процесс поведения деформаций твердого тела при его нагружениb и последующей разгрузке. Способность…Расчетная схема сооружений. Опорные связи
Для создания общего подхода по изучению поведения конструктивных элементов все разнообразие реальных сооружений можно разбить на несколько групп: массивные тела, имеющие все три размера одного порядка (гидротехнические плотины, грунтовые основания), двухмерные, имеющие два размера одного порядка (пластинки, оболочки) и третий, значительно меньший, чем первые два; и одномерного элемента, имеющего два размера ничтожно малой величины по сравнению с третьим размером — длиной (брус).
 В сопротивлении материалов объектом изучения служит в основном элемент третьей группы — одномерный элемент, брус. Брус представляет собой тело, образованное движением плоской фигуры по некоторой кривой (или прямой), совпадающей с центром тяжести этой фигуры. Для такого элемента кривая, по которой двигалась плоская фигура, является осью бруса, а сама плоская фигура — его поперечным сечением. На практике поперечное сечение принимается в виде простых фигур: квадрата, прямоугольника, круга, или в виде сложных: двутавра и т. д. По длине брус может иметь постоянное, переменное или ступенчатое поперечное сечение. Расчетная схема бруса изображается в виде его осевой линии, проходящей через центры тяжести поперечных сечений. Брус соединяется с другими элементами и основанием условными опорными связями. Непосредственно к осевой линии прикладываются внешние нагрузки и опорные реакции.
В сопротивлении материалов объектом изучения служит в основном элемент третьей группы — одномерный элемент, брус. Брус представляет собой тело, образованное движением плоской фигуры по некоторой кривой (или прямой), совпадающей с центром тяжести этой фигуры. Для такого элемента кривая, по которой двигалась плоская фигура, является осью бруса, а сама плоская фигура — его поперечным сечением. На практике поперечное сечение принимается в виде простых фигур: квадрата, прямоугольника, круга, или в виде сложных: двутавра и т. д. По длине брус может иметь постоянное, переменное или ступенчатое поперечное сечение. Расчетная схема бруса изображается в виде его осевой линии, проходящей через центры тяжести поперечных сечений. Брус соединяется с другими элементами и основанием условными опорными связями. Непосредственно к осевой линии прикладываются внешние нагрузки и опорные реакции.
В качестве опорных связей используются следующие виды: шарнирно-подвижная, шарнирно-неподвижная и жесткая опора (заделка).
В дальнейшем изложении будут употребляться термины балка, стержень, которые являются тем же брусом, но отличаются
рис.4.1 рис.4.2 специфическими условиями деформирования. Балка работает на изгиб, а стержень — на растяжение-сжатие.
Таким образом, в сопротивлении материалов, а также и в строительной механике исследуются не действительные сооружения, а их расчетные схемы. Замена реального сооружения его расчетной схемой является ответственной и сложной проблемой, от правильного решения которой зависит достоверность результатов последующих расчетов. На примере покажем, как реальная балка, изображенная (на рис. 4.1 а – верхний рис.) заменяется ее расчетной схемой (рис. 4.1,б- верхний рис.).
Следует обратить внимание на ограничение применения правил теоретической механики. В сопротивлении материалов нельзя переносить момент пары сил в другую точку или точку приложения сосредоточенной силы по линии ее действия, так как перенос нагрузки в новое положение вызывает изменение в распределении внутренних сил в конструкции. Например, при загружении фермы силой F в верхнем узле С (рис. 4.2,а) в стержне CD не возникает никаких сил. Если же силу F перенести по линии ее действия и приложить к нижнему узлу D (рис. 4.2,6), то в стержне CD появится растягивающая сила, равная F.
Также нельзя систему сил заменять ее равнодействующей при определении перемещений конструкции. Например, в балке, нагруженной двумя силами F в опорных сечениях В и С, не возникает никаких перемещений ее оси (рис. 4.1, а- нижний рис.). Если же эти две силы заменить равнодействующей 2 F, приложенной посередине пролета балки (рис. 4.1,6- нижний рис.), то балка изогнется. Правила теоретической механики всегда остаются справедливыми при составлении условий равновесия.
Допущения и ограничения, принятые в сопротивлении материалов
1.1 Допущение о непрерывном (сплошном) строении материала.По этому допущению принимается, что весь объем любого элемента конструкции заполнен… 2. Допущение о ненапряженном состоянии тела.Согласно этому допущению, в… 3. Допущение об однородности материала. Согласно этому допущению принимается, что материал во всех точках любого…Виды нагрузок и основных деформаций
Силы, воспринимаемые элементами конструкций, являются либо массовыми, или объемными (силы тяжести, силы инерции), либо поверхностными силами… В теоретической механике мы установили, что поверхностные нагрузки бывают… В зависимости от характера действия нагрузки подразделяют на статические и динамические.Формы элементов конструкции
1. Брус — любое тело, у которого длина значительно больше других размеров. В зависимости от форм продольной оси и поперечных сечений различают несколько… — прямой брус постоянного поперечного сечения (рис. 4.4, а);Метод сечений. Напряжение
Уметь определять виды нагружений и внутренние силовые факторы в поперечных сечениях. Для расчетов деталей машин и сооружений на прочность необходимо знать… В теоретической механике мы имели дело с неизменяемыми системами; в сопротивлении материалов рассматриваются…Тема 4.2.
Растяжение и сжатие.
Внутренние силовые факторы, напряжения. Построение эпюр
Иметь представление о продольных силах, о нормальных напряжениях в поперечных сечениях.
Знать правила построения эпюр продольных сил и нормальных напряжений, закон распределения нормальных напряжений в поперечном сечении бруса.
Уметь строить эпюры продольных сил и нормальных напряжений
Растяжение и сжатие
Продольные силы меняются по длине бруса. При расчетах после определения величин продольных сил по сечениям строится график — эпюра продольных… Условно назначают знак продольной силы.Центральное растяжение прямого бруса. Напряжения
Явление центрального растяжения (сжатия) возникает только тогда, когда все внешние нагрузки действуют, по оси, проходящей через центры тяжести… В тех случаях, когда направление силы N неизвестно, следует ее принимать…Напряжения при растяжении и сжатии
Напряжения в поперечных сечениях могут рассматриваться как силы, приходящиеся на единицу площади. Таким образом, направление и знак напряжения в сечении совпадают с… Исходя из гипотезы плоских сечений, можно предположить, что напряжения при растяжении и сжатии в пределах каждого…Продольные и поперечные деформации. Закон Гука
Знать закон Гука, зависимости и формулы для расчета напряжений и перемещений. Уметь проводить расчеты на прочность и жесткость статически определимых… Деформации при растяжении и сжатииЗакон Гука при растяжении и сжатии
Закон Гука при растяжении и сжатии справедлив лишь в определенных пределах нагружения и формулируется так: нормальное напряжение прямо… Математически закон Гука можно записать в виде равенства: σ = Еε.Формулы для расчета перемещений поперечных сечений бруса при растяжении и сжатии.
Закон Гука σ=Еε. Откуда . Относительное удлинение .Выводы
1. Абсолютное удлинение бруса прямо пропорционально величине продольной силы в сечении, длине бруса и обратно пропорционально площади поперечного сечения и модулю упругости.
2. Связь между продольной и поперечной деформациями зависит от свойств материала, связь определяется коэффициентом Пуассона, называемом коэффициентом поперечной деформации.
 Коэффициент Пуассона: у стали μ от 0,25 до 0,3; у пробки μ = 0; у резины μ — 0,5.
Коэффициент Пуассона: у стали μ от 0,25 до 0,3; у пробки μ = 0; у резины μ — 0,5.
2. Поперечные деформации меньше продольных и редко влияют на работоспособность
детали; при необходимости поперечная деформация рассчитывается через продольную.
 , где Δ а – поперечное сужение, мм;
, где Δ а – поперечное сужение, мм;  - начальный поперечный размер, мм. рис.4.14
- начальный поперечный размер, мм. рис.4.14
3. Закон Гука выполняется в зоне упругих деформаций, которая определяется при испытаниях на растяжение по диаграмме растяжения (рис. 4.14).
4. При работе пластические деформации не должны возникать, упругие деформации малы по сравнению с геометрическими размерами тела. Основные расчеты в сопротивлении материалов проводятся в зоне упругих деформации, где действует закон Гука.
На диаграмме (рис. 4.1.4) закон Гука действует от точки 0 до точки 1.
5. Определение деформации бруса под нагрузкой и сравнение её с допускаемой (не нарушающей работоспособности бруса) называют расчетом на жесткость.
Механические испытаниймеханические характеристики.
Предельные и допускаемые напряжения
Иметь представление о предельных и допускаемых напряжениях и коэффициенте запаса прочности.
Знать диаграммы растяжения и сжатия пластичных и хрупких материалов, порядок расчетов на прочность.
При выборе материалов для элементов конструкции и расчетов на прочность необходимо знать механические характеристики. Необходимые сведения получают экспериментально при испытаниях на растяжение, сжатие, срез, кручение и изгиб.
Механические испытания. Статические испытания на растяжение и сжатие
На рис. 4.15 представлена схема испытаний (— начальный диаметр поперечного сечения; — начальная длина). На рис. 4.16 изображена схема образца до (рис. 4.16, а) и после (рис. 4.16,… Образец закрепляется в зажимах разрывной машины и растягивается до разрыва. Машина снабжена прибором для…Механические характеристики
В процессе этого испытания специальное устройство испытательной машины автоматически вычерчивает диаграмму, выражающую зависимость между… Диаграмма растяжения низкоуглеродистой стали представлена на рис. 19.6. Эта… Точка А соответствует пределу пропорциональности.– Конец работы –
Используемые теги: Теоретическая, Механика0.048
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Теоретическая механика
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.134 сек.
Новости и инфо для студентов