Методом сечения Полученное выражение можно обобщить
Методом сечения Полученное выражение можно обобщить - Лекция, раздел Механика, Теоретическая механика Поперечная Сила В Рассматриваемом Сечении Равна Алгебраической Сумме Всех Сил...
Поперечная сила в рассматриваемом сечении равна алгебраической сумме всех сил, действующих на балку до рассматриваемого сечения:
Q = ΣFi
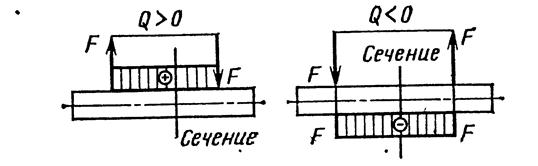
Поскольку речь идет об алгебраической сумме, в которой необходимо учитывать знак действующих сил, необходимо сформулировать правило знаков при определении значений поперечной силы в сечении; внешние силы активные и реактивные, лежащие по левую сторону от сечения, считаются положительными, если они направлены вверх, отрицательными — вниз, а по правую сторону — наоборот (рис. 104).
Рис. 104. Правила знаков поперечной силы Q
Перейдем к рассмотрению второго уравнения равновесия. Определим сумму моментов относительно рассматриваемого сечения I
(ΣМ)I =MI + F1l1 - F2l2 = 0
откуда
MI = - F1l1 + F2l2
Это выражение также обобщим. Изгибающий момент в рассматриваемом сечении равен алгебраической сумме моментов относительно этого сечения всех внешних сил и моментов, действующих на балку до рассматриваемого сечения:
М = Σ Mi
Сформулируем правило знаков при определении зна-чения изгибающего момента: момент, изгибающий балку выпуклостью вниз, считается положительным, а вверх — отрицательным (рис. 105). Для лучшего запоминания Рис 105. Правило знаков изгибающего
правила знаков изгибающего момента М
момента следует отметить, что его значение откладывается в сторону сжатого волокна (см. рис. 105): при изгибе выпуклостью вниз сжатое волокно наверху балки, т. е. в плюс, а при изгибе выпуклостью вверх, сжатое волокно внизу — момент откладывается вниз — минус.
Напомним, что существует три вида опор балок:
1) шарнирно-подвижная опора (рис. 106);
2) шарнирно-неподвижная опора (рис. 107);
3) жесткая заделка или защемление (рис. 108).
В опорах возникают силовые факторы, называемые реакциями опор. Два первых вида шарнирных опор допускают свободное проворачивание балки, и поэтому в них не возникает опорных моментов. Только жесткая заделка, не допускающая поворота балки в опоре, создает реактивный опорный момент.
Подвижная шарнирная опора допускает свободное осевое перемещение балки на катках, поэтому в ней возникает только одна опорная реакция.
В неподвижной шарнирной опоре возникает реакция под углом α к горизонтальной оси, эта реакция может быть разложена на две реакции в горизонтальном и вертикаль-
Рис. 109. Консольная балка под Рис. 110. Расчетная схема кон- нагрузкой сольной балки
ном направлениях. Угол α определяет отношение величин горизонтальной и вертикальной составляющих реакций опор:
Жесткая заделка, или защемление, дает три реакции: Rx, Ry , M.
Рассмотрим, например, балку, нагруженную силой F, защемленную с одной стороны, и свободную с другой (рис. 109). Такую балку называют консольной. Ось у направим вертикально, а ось х — горизонтально.
Действующую под углом α силу F разложим по осям х и у на F cos α и F sin а (см. рис. 109). В защемлении возникают три неизвестные реакции: две силы R„ и RKи момент М. Приложим к балке неизвестные опорные реакции и получим расчетную схему (рис. 110). Балка находится в равновесии, и поэтому должны быть справедливы три уравнения равновесия
ΣМ = 0, ΣFy = 0 , ΣFx = 0 .
Подставим в эти уравнения силы и моменты, действующие на консоль:
ΣFy = Ry — F sin α = 0 ,
ΣFx = Rx – F cosα = 0
ΣМ = М — Fl sin α = 0.
Момент взят относительно точки А для простоты, чтобы исключить моменты от неизвестных опорных реакций Rx и Ry . Определим
Рис. 111. Действие силы на двухопорную балку
Ry= F sin α ; Rx = F cos α ; М = F l sin α.
Из рассмотрения этого примера следует, что если действующие силы будут перпендикулярны оси балки, т. е. угол α = 90°, то горизонтальных составляющих опорных реакций не будет: cos α = 0 , Rx = 0.
Теперь можно перейти к рассмотрению способов построения графиков изменения внутренних силовых факторов при изгибе Q и М по длине балки или эпюр Q и М.
Предварительно рассмотрим несколько простейших примеров. Некоторые из них приведены в приложении III.
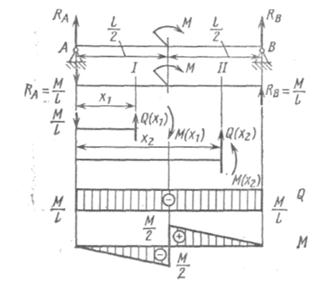
Пример 1. Построить эпюры Q и М при изгибе балки на двух опорах или двухопорной балки под действием сосредоточенной силы F (рис. 111).
Решение. Определим опорные реакции Ra и Rbиз уравнений равновесия балки
ΣМА = F a — RB (а + b) = 0,
ΣF = RA — F + RB = 0
Из первого уравнения найдем RB
а из второго уравнения определим RA
Разобьем балку на два участка и запишем выражение поперечных сил и изгибающих моментов для каждого из участков с учетом выведенных выше соотношений и принятых правил знаков:
для участка I на расстоянии х1от опоры А
Где 0 ≤ x1 ≤ a
При x1 = 0 М (0) = 0,
При х1 = а
Рис. 112. Действие изгибающего
момента на двухопорную балку
для участка II на расстоянии х2от опоры А
Где 0 ≤ x1 ≤ a + b
при x2 = a
при x2 = a + b M(a + b) = 0
Таким образом, на каждом участке балки Q постоянно, причем для участка
I — положительно, а для II — отрицательно, а момент имеет линейную зависимость от х и на участке I возрастает от 0 до,а на участке II убывает от этой величины до нуля. С учетом этого построим эпюры Q и М (см. рис. 111). Следует отметить, что там, где действует сила, на эпюре поперечных сил наблюдается скачок, равный по величине действующей силе. Так, на эпюре Q имеется три скачка там, где действуют силы Ra , F и Rb .
Если сила имеет знак плюс, скачок наблюдается вверх, если минус — вниз, в случае действия силы F.
Определим связь между нормальным напряжением при изгибе балки σ и изгибающим моментом М. Рассмотрим условия чистого изгиба балки (рис. 114), когда Q = 0 и в сечении действует только изгибающий момент. Опыт показывает, что соотно-шение для σ при чистом изгибе можно использовать для опреде-ления нормальных напряжений при поперечном изгибе.
Рассмотрим положение двух плоскостей I , II , лежащих друг от друга на малом расстоянии dx (см. рис. 114). При изгибе так же, как и при растяжении и кручении,
Рис 114. Деформация бруса при справедлива гипотеза плоских
чистом изгибе сечений. Сечения I и II, плоские до изгиба, остались плоскими и после изгиба (I' и II'). Только при этом повернулись на некоторый малый угол dφ, оставаясь перпендикулярными к наружным
поверхностям балки. При этом верхние волокна балки растянулись, их длина а'b' стала больше прежней ab, а нижние волокна балки тп сжались и приняли положение т'п'.
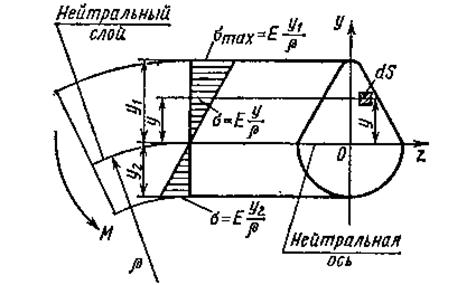
Логично предположить, что между верхними и нижними волокнами имеется линия раздела 1—2, называемая нейтральным слоем, который при изгибе не будет менять своей длины. При чистом изгибе он примет форму дуги окружности радиуса р. Рассмотрим деформацию произвольного волокна cd балки на расстоянии у от нейтрального слоя 1—2 (рис. 115). Проведем из точки 2 прямую 2е, параллельную 1с, тогда ed будет равна удлинению волокна cd. Ввиду малости угла dφ определим дуги ed и 1 — 2: ed = y dφ ; 1 — 2 — ρ dφ , откуда следует
если учесть, что dx — длина волокна cd до деформации (см. рис. 114), то станет ясно, что ed /dx является деформацией волокна cd:
Полученная зависимость показывает что деформация волокна прямо пропорциональна её расстоя-нию y от нейтрального слоя. Максимальные деформации балка испытывает в
точках поперечного сечения
Рис. 115 Деформация волокон бруса при
изгибе
максимально удаленных от нейтрального слоя. Для определения напряжений воспользуемся законом Гука
σ = Е ε
откуда следует после подстановки соотношение
Нормальное напряжение в поперечном сечении при изгибе балки прямо пропорционально расстоянию от нейтральной оси балки. Пользуясь этой зависимостью, можно построить эпюру распределения нормальных напряжений по сечению балки (рис. 116). В нейтральном слое не возникает ни нормальных напряжений, ни деформаций. Линия пересечения нейтрального слоя с поперечным сечением балки называется нейтральной осью.
Определим положение нейтральной оси. Для этого вспомним, что в поперечном сечении сумма всех сил на ось х равна нулю, так как при изгибе балки продольных сил нет.
Рис. 116. Эпюра нормальных напряжений при изгибе
Продольная элементарная сила, действующая на элементарную площадку dS,
Просуммировав по всей площади, получим
С учетом того, что постоянная величина , следует равенство
Ранее при рассмотрении геометрических характеристик сечений было показано, что это равенство не что иное, как равенство нулю статического момента площади сечения относительно оси z : S = 0, что свидетельствует о том, что нейтральная ось проходит через центр тяжести сечения 0 (см. рис. 116).
Для количественного определения напряжений необходимо найти радиус кривизны нейтрального слоя деформированной балки r. Запишем очевидное равенство действующего в сечении изгибающего момента М моменту от нормальных сил. Элементарная нормальная сила на расстоянии у от нейтральной оси, действующая на элементарную площадку dS,
dN = s dS,
а элементарный момент относительно нейтральной оси
dM = s y dS.
Суммируя элементарные моменты по площади сечения и подставляя выражение , найдем
Отсюда определим кривизну изогнутой оси бруса
Где — момент инерции поперечного сечения относительно оси z.
Подставим выражение кривизны в формулу для s и окончательно после элементарных преобразований получим
Поскольку нас больше всего интересует максимальное напряжение, то из эпюры изгибающих моментов необходимо найти максимальный изгибающий момент Mmax и для поперечного сечения, соответствующего Мmах, найти максимальные нормальные напряжения по формуле
Где — момент сопротивления изгибу.
Формулы для определения момента сопротивления основных сечений изгибу приведены в табл. Эти формулы встречаются в расчетной практике. Числовые значения моментов сопротивления для стандартных профилей проката указаны в соответствующих ГОСТах на прокат.
Момент сопротивления изгибу измеряется в м3. Если материал балки пластичный, например, сталь, то условие прочности определяется по максимальному напряжению
В случае хрупкого материала (чугун) требуется проверка прочности по напряжениям, как растяжения, так и сжатия:
С учетом условий прочности решаются три основные задачи:
1) задача проверки прочности — по заданным нагрузкам и геометрическим размерам поперечного сечения определяют максимальное напряжение в сечении, называемом опасным
и оно сопоставляется c допускаемым [s ] ;
2) проектная задача, когда по заданным нагрузкам и допускаемым напряжени-ям определяют поперечное сечение балки, исходя из момента сопротивления изгибу:
3) задача определения допускаемой нагрузки
[ М] = W [s ],
где [М] — допускаемая нагрузка, определяемая по опасному сечению балки.
Рис. 117.Эпюра изгибающих моментов М и перерезывающих сил
Таблица 1. Формулы для определения момента сопротивления изгибу
основных сечений
Сечение
Формула
момента сопротивления
изгибу W
ЛЕКЦИЯ 31
Тема 2.6. Понятие о касательных напряжениях
при изгибе. Линейные и угловые перемещения
при изгибе, их определение
Иметь представление о касательных напряжениях при изгибе, об упругой линии балки, о деформациях при изгибе и методах определения линейных и угловых перемещений.
Знать один из методов определения линейных и угловых перемещений.
Задачи теоретической механики
Теоретическая механика — наука о механическом движении материальных твердых тел и их взаимодействии. Механическое движение понимается как перемещение тела в пространстве и во времени по от
Третья аксиома
Не нарушая механического состояния тела, можно добавить или убрать уравновешенную систему сил (принцип отбрасывания системы сил, эквивалентной нулю) (рис. 1.3).
Р,=Р2 Р,=Р.
Связи и реакции связей
Все законы и теоремы статики справедливы для свободного твердого тела.
Все тела делятся на свободные и связанные.
Свободные тела — тела, перемещение которых не ограничено.
Жесткий стержень
На схемах стержни изображают толсто сплошной линией (рис. 1.9).
Стержень може
Неподвижный шарнир
Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но
Плоская система сходящихся сил
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся (рис. 2.1).
Равнодействующая сходящихся сил
Равнодействующую двух пересекающихся сил можно определить с помощью параллелограмма или треугольника сил (4-я аксиома) (вис. 2.2).
Условие равновесия плоской системы сходящихся сил
При равновесии системы сил равнодействующая должна быть равна нулю, следовательно, при геометрическом построении конец последнего вектора должен совпасть с началом первого.
Если
Решение задач на равновесие геометрическим способом
Геометрическим способом удобно пользоваться, если в системе три силы. При решении задач на равновесие тело считать абсолютно твердым (отвердевшим).
Порядок решения задач:
Решение
1. Усилия, возникающие в стержнях крепления, по величине равны силам, с которыми стержни поддерживают груз (5-я аксиома статики) (рис. 2.5а).
Определяем возможные направления реакций связе
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым
перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).
Сил аналитическим способом
Величина равнодействующей равна векторной (геометрической) сумме векторов системы сил. Определяем равнодействующую геометрическим способом. Выберем систему координат, определим проекции всех зада
Пара сил, момент пары сил
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны.
Рассмотрим систему сил (Р; Б"), образующих пару.
Момент силы относительно точки.
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается моментом.
Момент силы отн
Теорема Пуансо о параллельном переносе сил
Силу можно перенести параллельно линии ее действия, при этом нужно добавить пару сил с моментом, равным произведению модуля силы на расстояние, на которое перенесена сила.
Расположенных сил
Линии действия произвольной системы сил не пересекаются в одной точке, поэтому для оценки состояния тела такую систему следует упростить. Для этого все силы системы переносят в одну произвольно вы
Влияние точки приведения
Точка приведения выбрана произвольно. При изменении положения точки приведения величина главного вектора не изменится.
Величина главного момента при переносе точки приведения изменится,
Плоской системы сил
1. При равновесии главный вектор системы равен нулю .
Аналитическое определение главного вектора приводит к выводу:
Виды нагрузок
По способу приложения нагрузки делятся на сосредоточенные и распределенные. Если реально передача нагрузки происходит на пренебрежимо малой площадке (в точке), нагрузку называют сосредоточенной
Момент силы относительно оси
Момент силы относительно оси равен моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с плоскостью (рис. 7.1 а).
MOO
Вектор в пространстве
В пространстве вектор силы проецируется на три взаимно перпендикулярные оси координат. Проекции вектора образуют ребра прямоугольного параллелепипеда, вектор силы совпадает с диагональю (рис. 7.2
Пространственная сходящаяся система сил
Пространственная сходящаяся система сил — система сил, не лежащих в одной плоскости, линии действия которых пересекаются в одной точке.
Равнодействующую пространственной системы си
Центр тяжести однородных плоских тел
(плоских фигур)
Очень часто приходится определять центр тяжести различных плоских тел и геометрических плоских фигур сложной формы. Для плоских тел можно записать: V =
Определение координат центра тяжести плоских фигур
Примечание. Центр тяжести симметричной фигуры находится на оси симметрии.
Центр тяжести стержня находится на середине высоты. Положения центров тяжести простых геометрических фигур могут
Кинематика точки
Иметь представление о пространстве, времени, траектории, пути, скорости и ускорении .Знать способы задания движения точки (естественный и координатный).
Знать обозначения, едини
Пройденный путь
Путь измеряется вдоль траектории в направлении движения. Обозначение — S,
единицы измерения — метры.
Уравнение движения точки :
Уравнение, определяющ
Скорость движения
Векторная величина, характеризующая в данный момент быстроту и направление движения по траектории, называется скоростью.
Скорость — вектор, в любой момент направленный по к
Ускорение точки
Векторная величина, характеризующая быстроту изменения скорости по величине и направлению, называется ускорением точки.
Скорость точки при перемещении из точки М1
Равномерное движение
Равномерное движение — это движение с постоянной скоростью:
v = const.
Для прямолинейного равномерного движения (рис. 10.1 а)
Равнопеременное движение
Равнопеременное движение — это движение с постоянным касательным ускорением:
at = const.
Для прямолинейного равнопеременного движения
Поступательное движение
Поступательным называют такое движение твердого тела, при котором всякая прямая линия на теле при движении остается параллельной своему начальному положению (рис. 11.1, 11.2).
При
Вращательное движение
При вращательном движении все точки тела описывают окружности вокруг общей неподвижной оси.
Неподвижная ось, вокруг которой вращаются все точки тела, называется осью вращения.
Частные случаи вращательного движения
Равномерное вращение (угловая скорость постоянна):
ω =const
Уравнение (закон) равномерного вращения в данном случае имеет вид:
Скорости и ускорения точек вращающегося тела
Тело вращается вокруг точки О. Определим параметры движения точки A , расположенной на расстоянии RA от оси вращения (рис. 11.6, 11.7).
Путь
Решение
1. Участок 1 — неравномерное ускоренное движение, ω = φ’ ; ε = ω’
2. Участок 2 — скорость постоянна — движение равномерное,
. ω = const
3.
Основные определения
Сложным движением считают движение, которое можно разложить на несколько простых. Простыми движениями считают поступательное и вращательное.
Для рассмотрения сложного движения точ
Плоскопараллельное движение твердого тела
Плоскопараллельным, или плоским, называется такое движение твердого тела, при котором все точки тела перемещаются параллельно некоторой неподвижной в рассматриваемой системе отсчета
Поступательное и вращательное
Плоскопараллельное движение раскладывают на два движения: поступательное вместе с некоторым полюсом и вращательное относительно этого полюса.
Разложение используют для опред
Центра скоростей
Скорость любой точки тела можно определять с помощью мгновенного центра скоростей. При этом сложное движение представляют в виде цепи вращений вокруг разных центров.
Задача
Аксиомы динамики
Законы динамики обобщают результаты многочисленных опытов и наблюдений. Законы динамики, которые принято рассматривать как аксиомы, были сформулированы Ньютоном, но первый и четвертый законы были и
Понятие о трении. Виды трения
Трение — сопротивление, возникающее при движении одного шероховатого тела по поверхности другого. При скольжении тел возникает трение скольжения, при качении — трение качения. Природа сопро
Трение качения
Сопротивление при качении связано с взаимной деформацией грунта и колеса и значительно меньше трения скольжения.
Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и
Свободная и несвободная точки
Материальная точка, движение которой в пространстве не ограничено какими-нибудь связями, называется свободной. Задачи решаются с помощью основного закона динамики.
Материальные то
Сила инерции
Инертность — способность сохранять свое состояние неизменным, это внутреннее свойство всех материальных тел.
Сила инерции — сила, возникающая при разгоне или торможении тел
Решение
Активные силы: движущая сила, сила трения, сила тяжести. Реакция в опоре R. Прикладываем силу инерции в обратную от ускорения сторону. По принципу Даламбера, система сил, действующих на платформу
Работа равнодействующей силы
Под действием системы сил точка массой т перемещается из положения М1 в положение M 2 (рис. 15.7).
В случае движения под действием системы сил пользуютс
Мощность
Для характеристики работоспособности и быстроты совершения работы введено понятие мощности.
Мощность — работа, выполненная в единицу времени:
Мощность при вращении
Рис. 16.2
Тело движется по дуге радиуса из точки М1 в точку М2
М1М2 = φr
Работа силы
Коэффициент полезного действия
Каждая машина и механизм, совершая работу, тратит часть энергии на преодоление вредных сопротивлений.
Таким образом, машина (механизм) кроме полезной работы совершает еще и дополнитель
Теорема об изменении количества движения
Количеством движения материальной точки называется векторная величина, равная произведению массы точки на ее скорость mv.
Вектор количества движения совпадает по
Теорема об изменении кинетической энергии
Энергией называется способность тела совершать механическую работу.
Существуют две формы механической энергии: потенциальная энергия, или энергия положения, и кинетическая энергия,
Основы динамики системы материальных точек
Совокупность материальных точек, связанных между собой силами взаимодействия, называется механической системой.
Любое материальное тело в механике рассматривается как механическая
Напряжения
Метод сечений позволяет определить величину внутреннего силового фактора в сечении, но не дает возможности установить закон распределения внутренних сил по сечению. Для оценки прочности н
Внутренние силовые факторы, напряжения. Построение эпюр
Иметь представление о продольных силах, о нормальных напряжениях в поперечных сечениях.
Знать правила построения эпюр продольных сил и нормальных напряжений, закон распределения
Продольных сил
Рассмотрим брус, нагруженный внешними силами вдоль оси. Брус закреплен в стене (закрепление «заделка») (рис. 20.2а).
Делим брус на участки нагружения.
Участком нагружения с
Геометрические характеристики плоских сечений
Иметь представление о физическом смысле и порядке определения осевых, центробежных и полярных моментов инерции, о главных центральных осях и главных центральных моментах инерции.
Статический момент площади сечения
Рассмотрим произвольное сечение (рис. 25.1).
Если разбить сечение на бесконечно малые площадки dA и умножить каждую площадку на расстояние до оси координат и проинтегрировать получе
Центробежный момент инерции
Центробежным моментом инерции сечения называется взятая ковсей площади сумма произведений элементарных площадок на обе координаты:
Осевые моменты инерции
Осевым моментом инерции сечения относительно некоторой реи, лежащей в этой же плоскости, называется взятая по всей площади сумма произведений элементарных площадок на квадрат их расстояния
Полярный момент инерции сечения
Полярным моментом инерции сечения относительно некоторой точки (полюса) называется взятая по всей площади сумма произведений элементарных площадок на квадрат их расстояния до этой точки:
Полярный момент инерции круга
Для круга вначале вычисляют полярный момент инерции, затем — осевые. Представим круг в виде совокупности бесконечно тонких колец (рис. 25.3).
Деформации при кручении
Кручение круглого бруса происходит при нагружении его парами сил с моментами в плоскостях, перпендикулярных продольной оси. При этом образующие бруса искривляются и разворачиваются на угол γ,
Гипотезы при кручении
1. Выполняется гипотеза плоских сечений: поперечное сечение бруса, плоское и перпен-
дикулярное продольной оси, после деформацииостается плоским и перпендикулярным
продольной оси.
Внутренние силовые факторы при кручении
Кручением называется нагружение, при котором в поперечном сечении бруса возникает только один внутренний силовой фактор — крутящий момент.
Внешними нагрузками также являются две про
Эпюры крутящих моментов
Крутящие моменты могут меняться вдоль оси бруса. После определения величин моментов по сечениям строим график-эпюру крутящих моментов вдоль оси бруса.
Напряжения при кручении
Проводим на поверхности бруса сетку из продольных и поперечных линий и рассмотрим рисунок, образовавшийся на поверхности после
Рис. 27.1а
деформации (рис. 27.1а). Поп
Максимальные напряжения при кручении
Из формулы для определения напряжений и эпюры распределения касательных напряжений при кручении видно, что максимальные напряжения возникают на поверхности.
Определим максимальное напряж
Виды расчетов на прочность
Существует два вида расчета на прочность
1. Проектировочный расчет — определяется диаметр бруса (вала) в опасном сечении:
Расчет на жесткость
При расчете на жесткость определяется деформация и сравнивается с допускаемой. Рассмотрим деформацию круглого бруса над действием внешней пары сил с моментом т (рис. 27.4).
Основные определения
Изгибом называется такой вид нагружения, при котором в поперечном сечении бруса возникает внутренний силовой фактор —изгибающий момент. Брус , работающий на
Внутренние силовые факторы при изгибе
Пример 1.Рассмотрим балку, на которую действует пара сил с моментом т и внешняя сила F (рис. 29.3а). Для определения внутренних силовых факторов пользуемся методом с
Изгибающих моментов
Поперечная сила в сечении считается положительной, если она стремится развернуть се
Дифференциальные зависимости при прямом поперечном изгибе
Построение эпюр поперечных сил и изгибающих моментов существенно упрощается при использовании дифференциальных зависимостей между изгибающим моментом, поперечной силой и интенсивностью равномерн
Напряжения
Рассмотрим изгиб балки, защемленной справа и нагруженной сосредоточенной силой F (рис. 33.1).
Напряженное состояние в точке
Напряженное состояние в точке характеризуется нормальными и касательными напряжениями, возникающими на всех площадках (сечениях), проходящих через данную точку. Обычно достаточно определить напр
Понятие о сложном деформированном состоянии
Совокупность деформаций, возникающих по различным направлениям и в различных плоскостях, проходящих через точку, определяют деформированное состояние в этой точке.
Сложное деформи
Расчет круглого бруса на изгиб с кручением
В случае расчета круглого бруса при действии изгиба и кручения (рис. 34.3) необходимо учитывать нормальные и касательные напряжения, т. к. максимальные значения напряжений в обоих случаях возника
Понятие об устойчивом и неустойчивом равновесии
Относительно короткие и массивные стержни рассчитывают на сжатие, т.к. они выходят из строя в результате разрушения или остаточных деформаций. Длинные стержни небольшого поперечного сечения под дей
Расчет на устойчивость
Расчет на устойчивость заключается в определении допускаемой сжимающей силы и в сравнении с ней силы действующей:
Расчет по формуле Эйлера
Задачу определения критической силы математически решил
Л. Эйлер в 1744 г.
Для шарнирно закрепленного с обеих сторон стержня (рис. 36.2) формула Эйлера имеет вид
Критические напряжения.
Критическое напряжение — напряжение сжатия, соответствующее критической силе.
Напряжение от сжимающей силы определяется по формуле
Пределы применимости формулы Эйлера
Формула Эйлера выполняется только в пределах упругих деформаций.
Таким образом, критическое напряжение должно быть меньше
предела упругости материала.
Пред
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail

 вило знаков при определении зна-чения изгибающего момента: момент, изгибающий балку выпуклостью вниз, считается положительным, а вверх — отрицательным (рис. 105). Для лучшего запоминания Рис 105. Правило знаков изгибающего
вило знаков при определении зна-чения изгибающего момента: момент, изгибающий балку выпуклостью вниз, считается положительным, а вверх — отрицательным (рис. 105). Для лучшего запоминания Рис 105. Правило знаков изгибающего 




 Разобьем балку на два участка и запишем выражение поперечных сил и изгибающих моментов для каждого из участков с учетом выведенных выше соотношений и принятых правил знаков:
Разобьем балку на два участка и запишем выражение поперечных сил и изгибающих моментов для каждого из участков с учетом выведенных выше соотношений и принятых правил знаков:




 , а на участке II убывает от этой величины до нуля. С учетом этого построим эпюры Q и М (см. рис. 111). Следует отметить, что там, где действует сила, на эпюре поперечных сил наблюдается скачок, равный по величине действующей силе. Так, на эпюре Q имеется три скачка там, где действуют силы Ra , F и Rb .
, а на участке II убывает от этой величины до нуля. С учетом этого построим эпюры Q и М (см. рис. 111). Следует отметить, что там, где действует сила, на эпюре поперечных сил наблюдается скачок, равный по величине действующей силе. Так, на эпюре Q имеется три скачка там, где действуют силы Ra , F и Rb . Если сила имеет знак плюс, скачок наблюдается вверх, если минус — вниз, в случае действия силы F.
Если сила имеет знак плюс, скачок наблюдается вверх, если минус — вниз, в случае действия силы F. аружным
аружным
 если учесть, что dx — длина волокна cd до деформации (см. рис. 114), то станет ясно, что ed /dx является деформацией волокна cd:
если учесть, что dx — длина волокна cd до деформации (см. рис. 114), то станет ясно, что ed /dx является деформацией волокна cd:


 , следует равенство
, следует равенство 
 , найдем
, найдем

 — момент инерции поперечного сечения относительно оси z.
— момент инерции поперечного сечения относительно оси z.
 — момент сопротивления изгибу.
— момент сопротивления изгибу.















Новости и инфо для студентов