И вывод расчетной формулы
Прибор для выполнения работы (рис. 3.3) состоит из махового колеса 1, шкива 3, укрепленных на одной оси 2. На шкив наматывается нить, к концу которой прикрепляется груз 4. При падении груза с высоты h, отсчитываемой по линейке 5 до приемного столика 6, вся система приводится во вращательное движение.
Груз массой m, поднятый на высоту h от приемного столика, обладает потенциальной энергией mgh. Освобожденный без толчка груз начинает двигаться с ускорением, а маховое колесо приводится во вращение. В момент, когда груз коснется приемного столика, вся потенциальная энергия перейдет в кинетическую энергию поступательного движения падающего груза:

и в кинетическую энергию вращательного движения колеса и шкива:
 .
.
Частью энергии, затрачиваемой на преодоление трения в подшипнках, в данной работе пренебрегают.
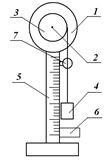
Рис. 3.3.
Момент инерции системы можно определить из закона сохранения энергии: полная механическая энергия замкнутой системы тел, взаимодействующих консервативными силами, не изменяется. В рассматриваемом случае
 , (3.1)
, (3.1)
где u – скорость груза в момент касания пола;
w – угловая скорость колеса.
В уравнение (3.1) подставим значение  (при падении без начальной скорости пройденный путь
(при падении без начальной скорости пройденный путь  , отсюда
, отсюда  ) и значение
) и значение  . В результате получим:
. В результате получим:
 ,
,
отсюда
 . (3.2)
. (3.2)
Здесь момент инерции колеса определяется через массу падающего груза m, высоту h, с которой падает груз, и время падения груза, но от них не зависит. При выполнении лабораторной работы убедитесь в этом, изменяя массу падающего груза и высоту падения.