рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Раздел Теоретическая механика
Реферат Курсовая Конспект
Раздел Теоретическая механика
Раздел Теоретическая механика - раздел Механика, В.в.гараников ...
В.В.ГАРАНИКОВ
ТЕХНИЧЕСКАЯ МЕХАНИКА
Раздел «Теоретическая механика»
Тверь, 2011г.
ПРЕДИСЛОВИЕ
Учебная дисциплина «Техническая механика» состоит из трех разделов: «Теоретическая механика», «Сопротивление материалов», «Детали машин».
Согласно учебных планов для ряда специальностей раздел «Детали машин» изучается отдельно.
Автором ставилась задача в сжатой и доступной форме изложить основные положения только одного раздела учебной дисциплины, а именно «Теоретической механики». Теоретическая механика – это наука, в которой изучаются общие законы механического движения твердых тел и механического взаимодействия материальных тел.
Объем представленного материала соответствует программе дисциплины «Техническая механика», рекомендованной для данного направления подготовки бакалавров Министерством образования и науки Российской Федерации и учебному плану.
Дисциплина «Техническая механика» является общепрофессиональной, обеспечивающей базовые знания при усвоении специальных дисциплин, изучаемых в дальнейшем.
РАЗДЕЛ ПЕРВЫЙ
СТАТИКА ТВЕРДОГО ТЕЛА
ОСНОВНЫЕ ПОНЯТИЯ СТАТИКИ
Введение
Теоретическая механика – это наука, в которой изучаются общие законы механического движения и механического взаимодействия материальных тел. Механического движением называется изменение с течением времени взаимного положения материальных точек в пространстве. Механическим взаимодействием называется такое взаимодействие материальных тел, которое изменяет характер их механического движения.
Курс теоретической механики делится на три раздела: статику, кинематику и динамику.
Статика – это раздел механики, в котором изучаются методы преобразования систем сил в эквивалентные системы и устанавливаются условия равновесия сил, приложенных к твердому телу.
Кинематика – раздел механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, вне связи с силами, определяющими это движение.
Динамика – раздел механики, в котором изучается движение материальных тел в пространстве в зависимости от действующих на них сил.
Материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать, называют материальной точкой. Материальная точка обладает массой и способностью взаимодействовать с другими телами. В теоретической механике рассматривают тела, расстояние между точками которых остаются неизменными. Такие тела называются абсолютно твердыми. Принимаем эту модель в качестве объекта исследования, пренебрегая возможными изменениями формы и размеров тела под действием нагрузок: считая, что
1) деформации малы – ими можно пренебречь
2) условие равновесия сил, приложенных к абсолютно твердому телу, являются необходимыми условиями равновесия любого тела.
Важнейшими понятиями в теоретической механике является понятие силы. Сила – это мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия. Сила обозначается вектором.

Рис. 1.1
Сила определяется тремя элементами: числовым значением, направлением, точкой приложения. Силу измеряют в ньютонах.
Совокупность нескольких сил, действующих на данное тело, называют системой сил

Если, не нарушая состояния тела, одну систему сил  можно заменить другой системой
можно заменить другой системой  и наоборот, то такие системы сил называются эквивалентными
и наоборот, то такие системы сил называются эквивалентными
 .
.
В том случае, когда система сил  эквивалентна одной силе
эквивалентна одной силе  , то есть
, то есть , то последняя называется равнодействующей этой системы сил.
, то последняя называется равнодействующей этой системы сил.
Если абсолютно твердое тело останется в состоянии покоя при действии на него системы сил , то последняя называется уравновешенной системой сил или системой сил эквивалентной нулю.
Часто в этом случае говорят, что тело находится в равновесии.
Силы, действующие на материальную систему, делятся на две группы: внешние и внутренние.
Внешними называются силы, действующие на материальные точки данной системы со стороны материальных точек (тел), не принадлежащих этой системе.
Внутренними называются силы взаимодействия между материальными точками рассматриваемой системы (силы межмолекулярного сцепления).
Различаются:
– сосредоточенные силы. Передаются через небольшую площадь или можно сказать в точке;

Рис. 1.2
– распределённые – передаются через определённую площадь
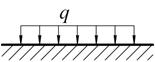
Рис.1.3
Аксиомы статики.
Данные аксиомы сформулированы на основе наблюдения и изучения окружающих нас явлений реального мира. Некоторые основные законы механики Галилея –… 1. Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется…ПЛОСКАЯ СИСТЕМА СИЛ
Система сходящихся сил
Сходящимися называются силы, линии, действия которых пересекаются в одной точке. Теорема. Система сходящихся сил эквивалентна общей силе, равнодействующей,…Произвольная плоская система сил
параллельных сил. Равнодействующая двух параллельных сил, направленных в одну сторону, равна по модулю сумме модулей слагаемых сил и направлена в туже сторону. Линия действия равнодействующей делит…ПРОСТРАНСТВЕННАЯ СИСТЕМА СИЛ.
Системы сходящихся сил.
В отличии от соответственно плоской задачи, силовой многоугольник не является плоским, то есть он представляет ломаную пространственную линию.… проекций слагаемых сил на соответствующей оси.Произвольная пространственная система сил.
В случае плоской системы сил момент силы относительно точки определён как алгебраическая величина: . При пространственном расположении сил этого… Таким образом вектор направлен перпендикулярно плоскости, содержащий линию действия силы и точку О, так что сила с…ЦЕНТР ТЯЖЕСТИ.
по всему объёму тела. Силы притяжения, приложенные к частицам твёрдого тела, образуют систему сил, линии, действия которых сходятся в центре Земли. Поскольку радиус Земли значительно больше размеров любогоРАЗДЕЛ ВТОРОЙ
КИНЕМАТИКА.
Кинематикой называется раздел механики, в котором изучается движение… Мы будем изучать простейшую форму движения – механическое движение, то есть происходящее во времени изменение…ДВИЖЕНИЕ ТОЧКИ.
Способ задания движения.
Задать движение точки по отношению к избранной системе отсчета – это значит указать способ, при помощи которого можно определить положение точки в любой момент времени.
Существуют три способа задания движения:
1. Векторный способ.
 Положение точки в пространстве однозначно определенном заданием радиуса – вектора
Положение точки в пространстве однозначно определенном заданием радиуса – вектора  , проведенного из некоторого неподвижного центра О в данную точку М.
, проведенного из некоторого неподвижного центра О в данную точку М.
Для определения движения точки нужно знать, как изменяется с течением времени , то есть должна быть известна функция
Рис. 2.1
 . (1)
. (1)
Годографом какого-либо вектора называют кривую, которую вычерчивает конец этого вектора при изменении его аргумента (предполагается, что начало вектора, находится в одной и той же точке).
Таким образом, годографом радиус – вектора является траектория точки.
2. Координатный способ.
 Положение точки М в системе координат ОХУ определяется координатами х, y, z.
Положение точки М в системе координат ОХУ определяется координатами х, y, z.
При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты х, y, z движущейся точки, являются функциями времени
Рис. 2.2
 (2)
(2)
Эти уравнения называются уравнениями движения точки в декартовых координатах.
Пусть движение точки М в плоскости задано уравнениями:

Из первого уравнения выразим время  и подставим во второе:
и подставим во второе:  – полученная зависимость есть уравнение траектории точки.
– полученная зависимость есть уравнение траектории точки.
3. Естественный способ задания движения.
Этот способ применяется в том случае, если траектория точки заранее известна.
Выберем на траектории неподвижную точку О, которую назовем началом отсчета дуговой координаты.  Положение точки М на траектории будем определять дуговой координатой S, отложенной на траектории от начала отсчета О. Расстояния, отложенные в одну сторону от точки О, будем считать положительными, в другую – отрицательными, то есть установим
Положение точки М на траектории будем определять дуговой координатой S, отложенной на траектории от начала отсчета О. Расстояния, отложенные в одну сторону от точки О, будем считать положительными, в другую – отрицательными, то есть установим
Рис. 2.3 направление отсчета дуговой координаты. При движении
точки М расстояние S от этой точки до неподвижной
точки О изменяется с течением времени:
 – уравнение движения т. М (3)
– уравнение движения т. М (3)
2.2. Скорость точки.
1. Векторный способ задания движения.
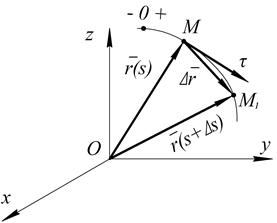
Пусть в момент времени  положение точки М определяется
положение точки М определяется  , а в момент
, а в момент  .
.

Рис. 2.4
Вектор  будем называть вектором перемещения точки за время
будем называть вектором перемещения точки за время  . Отношение
. Отношение  к ,называется средней скоростью за промежуток времени
к ,называется средней скоростью за промежуток времени
 (4)
(4)
Скоростью точки в данный момент времени называется предел отношения вектора перемещения точки к промежутку времени, за которое произошло это перемещение, при стремлении этого промежутка времени к нулю
 (5)
(5)

Скорость точки – это вектор, направленный по касательной к траектории в сторону движения.
2. Координатный способ задания движения.
Пусть движение точки задано

Тогда для радиуса – вектора точки М можно записать
 , (*)
, (*)
где  – единицы орты осей х, y, z.
– единицы орты осей х, y, z.
Согласно (5)  .
.
Дифференцируем (*)
 . (**)
. (**)
С другой стороны для вектора  справедливо соотношение
справедливо соотношение
 , (***)
, (***)
где  – проекции на оси х, y, z.
– проекции на оси х, y, z.
Сравнивая (**) и (***), получим
 (6)
(6)
Модуль скорости точки
 (7)
(7)
Направление скорости определяется направляющими косинусами:
3. Естественный способ задания движения.
Пусть в момент времени t положение точки М определяется координатой S, в момент  –
– 
Согласно (5)
 (*)
(*)
Вычислим модуль и определим направление  :
:


Вектор  направлен так же, как
направлен так же, как  .
.
Рис. 2.5
При направлении этого вектора стремится к направлению касательной к траектории в точке М.
Обозначим единичный орт касательной через 
 ,
,
Таким образом  , следовательно
, следовательно  , так как
, так как  .
.
Равенство (*) примет вид:
 (8)
(8)
Модуль  , направление совпадает с
, направление совпадает с  .
.
2.3. Ускорение точки.
1. При векторном способе задания движения.
Предположим, что в момент времени скорость точки  , а в момент
, а в момент  .
.
Предел приращения скорости к приращению времени за которое произошло это приращение, при условии, что , называется ускорением точки в данный момент времени.
 (9)
(9)
2. При координатном способе задания движения.
Вектор скорости точки
 .
.
С учетом (9)
 (*)
(*)
Но для вектора ускорения точки имеем
 (**)
(**)
Сравнивая (*) и (**), получим 
 (10)
(10)

Модуль ускорения точки
 . (11)
. (11)
Направление вектора ускорения определяется направляющими косинусами:
3. При естественном способе задания движения.
Пусть известна траектория точки.
Возьмем две близкие на траектории точки М и М1 –  .
.
Вектор  перенесем в точку М и проведем плоскость через . Эта плоскость, называется соприкасающейся плоскостью.
перенесем в точку М и проведем плоскость через . Эта плоскость, называется соприкасающейся плоскостью.
Плоскость перпендикулярная соприкасающейся, называется нормальной плоскостью. Плоскость перпендикулярная нормальной и соприкасающейся плоскостям называется спрямляющей плоскостью.
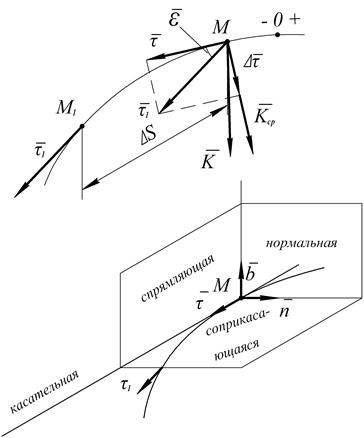
Рис.2.6
Три взаимно перпендикулярные плоскости:
нормальная, соприкасающая и спрямляющая образуют естественный трехгранник.
Линия пересечения нормальной и соприкасающейся плоскостей называется главной нормалью. Орт главной нормали –  . Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью траектории. Ось бинормали
. Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью траектории. Ось бинормали  .
.
Три взаимно перпендикулярные оси: касательная, направленная в сторону возрастания дуговой координаты; главная нормаль, направленная в сторону вогнутости траектории; бинормаль, направленная по отношению к  также, как ось z по отношению к осям х, y, называются естественными осями.
также, как ось z по отношению к осям х, y, называются естественными осями.
Угол между касательными в двух ближайших точках траектории называется углом смежности  .
.
Кривизной кривой в точке М называется предел отношения угла смежности к абсолютному значению длины дуги ММ, между ближайшими точками траектории
 (12)
(12)

Радиусом кривизны в точке М называется величина, обратная кривизне:
 . (13)
. (13)
Получим формулу для вычисления ускорения точки М. Согласно выражению (8) имеем:
 .
.
Продифференцируем по времени обе части этого равенства
 (*)
(*)
Вычислим  .
. 
Так как направление по главной нормали, то  .
.
Подставим в (*)
 ,
,
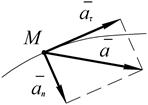
Ускорение точки лежит в соприкасающейся плоскости и определяется как векторная сумма касательного и нормального ускорений точки:
 . (14)
. (14)
Проекция ускорения на касательную определяется формулой:
 . (15)
. (15)
Касательное ускорение характеризует изменение скорости по величине. Оно равно нулю, когда величина скорости остается неизменной. Кроме того, оно обращается в нуль в те моменты времени, когда скорость достигает экстремальных значений.
Величина нормального ускорения определяется формулой:
 , (16)
, (16)
где  – радиус кривизны.
– радиус кривизны.
Нормальное ускорение характеризует изменение скорости по направлению. Оно равно нулю при прямолинейном движении точки, а также в точках перегиба траектории, так как в обоих случаях радиус кривизны обращается в бесконечность. Кроме того,  в точках где V=0.
в точках где V=0.
 Модуль ускорения вычисляется по формуле:
Модуль ускорения вычисляется по формуле:
 . (16)
. (16)
Рис. 2.7
Направление ускорения: 
Некоторые частные случаи движения точки.
1. Прямолинейное движение
 .
.
Так как при прямолинейном движении скорость изменяется только численно, то делаем вывод, что касательное ускорение характеризует изменение скорости по численной величине.
2. Равномерное криволинейное движение
Равномерным называется такое движение, в котором численная величина скорости остается все время постоянной ( ):
):
Так как ускорение при равномерном движении появляется в результате изменения направления скорости, то нормальное ускорение характеризует изменение скорости по направлению. Получим закон движения.
Отсюда:  .
.
Проинтегрируем: 
Подставим пределы интегрирования: 
В результате получим закон равномерного криволинейного движения:

3. Равномерное прямолинейное движение


следовательно, 
4. Равнопеременное криволинейное движение
Равнопеременным называется такое криволинейное движение, при котором касательное ускорение остается величиной постоянной:

 , проинтегрируем
, проинтегрируем

но  проинтегрируем
проинтегрируем

 – закон равнопеременного криволинейного движения.
– закон равнопеременного криволинейного движения.
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА.
Поступательное движение тела.
Возьмем две точки А и В, положение которых определяется радиусами векторами . Проведем вектор (*) При этом длина , так как тело абсолютно твердое, то есть траектория точки В получается из траектории точки А…Вращательное движение твердого тела.
АВ – ось вращения, Р – неподвижная плоскость, Q – подвижная плоскость,Уравнения равномерного вращения тела
ПроинтегрируемУравнения равнопеременного вращения тела
Если величина увеличивается, то вращение называется равноускоренным, если уменьшается – равнозамедленным. Разделим переменные:СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ.
Основные понятия.
Сложное движение называется движение точки относительно двух систем отсчета, одна из которых неподвижна, другая произвольно перемещается относительно неподвижной системы координат.
Движение тоски М относительно неподвижной системы координат (О, х1, у1, z1) называется абсолютным. Скорость и ускорение в этом движении называются абсолютной скоростью и абсолютным ускорением, обозначаются  .
.
Движение точки М относительно подвижной
Рис. 2.13 системы координат (О, х, у,
z), называется относительным. Скорость и ускорение в этом движении называются относительной скоростью и относительным ускорением, обозначаются  .
.
Подвижная система координат и все, что с ней неразрывно связано, называется переносной средой.
Движение точки М вместе с подвижной системой координат относительно неподвижной называется переносным движением. Скорость (ускорение) той точки переносной среды, с которой в данный момент времени совпадает наша точка, называются переносной скоростью (ускорением), обозначаются  .
.
Примером может служить движение человека по эскалатору. Движение эскалатора есть переносное движение, движение человека вниз или вверх по эскалатору есть относительное, а движение по отношению к неподвижным стенам – абсолютное.
Движение точки М по отношению к неподвижной системе отсчета, которое названо абсолютным, является сложным, состоящим из относительного и переносного движения точки. Основная задача изучения сложного движения состоит в установлении зависимостей между скоростями и ускорениями относительного, переносного и абсолютного движения точки.
Сложение скоростей.
Рис. 2.14 Сама кривая АВ, двигаясь вместе с подвижными осями (О, х, y, z) (на рисунке не показаны), перейдет за тот же…Сложение ускорений. Теорема Кориолиса.
Рис. 2.16 При определении рассматривается приращение вектора на абсолютном элементарном перемещении , при вычислении –…ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Введение
 |
Движение твердого тела называется плоским или плоскопараллельным, если все точки тела перемещаются в плоскостях, параллельных некоторой неподвижной плоскости.
Рис. 2.19
Рассмотрим произвольное плоское движение твердого тела. Пусть все точки тела перемещаются в плоскостях, параллельных плоскостях Оху.

Рис. 2.20
Из определения плоского движения и из свойств твердого тела (углы между прямыми, фиксированными в твердом теле, сохраняются неизменными) следует, что любая прямая АВ, проведенная в теле перпендикулярна плоскости Оху, будет перемещаться поступательно, то есть траектории, скорости, ускорения всех точек этой прямой будут одинаковы.
Таким образом, для определения движения тела необходимо знать движение лишь одной точки на каждой прямой, проведенной перпендикулярно плоскости Оху. Взяв точки в одной плоскости, параллельно плоскости Оху, мы можем утверждать, что плоское движение твердого тела вполне определяется движением плоской фигуры, полученной от пересечения тела любой плоскостью, параллельной плоскости Оху.
 |
Итак, задание движения тела сводится к заданию движения одного его сечения. Поэтому будем изображать только плоскую фигуру – сечение тела и изучать движение точек этого сечения в его плоскости.
Рис. 2.21
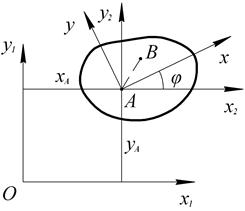
Свяжем жестко с плоской фигурой систему координат А,х,у. Тогда положение системы А,х,у, а вместе с ней и плоской фигуры относительно О,х1,у 1 будет определено заданием координат хА,уА точки А и углом  между осями Ах2 и Ах (оси Ах2 и Ау2 соответственно параллельно осям Ох1 и Оу1 и перемещаются при движении плоской фигуры поступательно).
между осями Ах2 и Ах (оси Ах2 и Ау2 соответственно параллельно осям Ох1 и Оу1 и перемещаются при движении плоской фигуры поступательно).
Таким образом,  определяют положение плоской фигуры в любой момент времени, то есть уравнения движения плоской фигуры.
определяют положение плоской фигуры в любой момент времени, то есть уравнения движения плоской фигуры.
5.2. Скорости точек тела при плоском движении.
Теорема.Скорость любой точки плоской фигуры равна геометрической сумме скорости точки, принятой за полюс и скорости данной точки при вращении плоской фигуры вокруг полюса.
Доказательство:
Рассмотрим плоскую фигуру. Точку А примем за полюс. Вычислим скорость точки В.
 |
Рис. 2.22
Радиус-вектор  – определяет положение точки В относительно 0х1у1.
– определяет положение точки В относительно 0х1у1.
Радиус-вектор  – определяет положение точки А относительно 0х1у1.
– определяет положение точки А относительно 0х1у1.
Радиус-вектор  – определяет положение точки В относительно 0х2у2.
– определяет положение точки В относительно 0х2у2.
Очевидно  .
.
Продифференцируем по времени обе части записанного уравнения:
 (*)
(*)
Заметим, что
 скорость точки В относительно подвижной системы координат Ах2у2.
скорость точки В относительно подвижной системы координат Ах2у2.
Введем обозначение  .
.
Движение тела относительно Ах2у2 представляет собой вращение тела вокруг оси Аz2, перпендикулярно плоскости чертежа. Таким образом,  – это скорость точки В при вращении тела вокруг оси, проходящей через полюс А, то есть с учетом формулы Эйлера.
– это скорость точки В при вращении тела вокруг оси, проходящей через полюс А, то есть с учетом формулы Эйлера.

и равенство (*) примет вид
 (27)
(27)
Модуль скорости  определяется следующим образом:
определяется следующим образом:

При этом вектор перпендикулярен АВ ( ).
).
Теорема. Проекции скоростей двух точек на прямую, их соединяющую, равны.
 |
Доказательство:
Рис. 2.23
Пусть скорость точки А известна –  . Согласно предыдущей теореме для скорости точки В имеем
. Согласно предыдущей теореме для скорости точки В имеем  .
.
Спроектируем обе части этого равенства на ось х
 ,
,  , так как
, так как  , то есть
, то есть  .
.
Мгновенный центр скоростей (МЦС)
Теорема. Если угловая скорость плоской фигуры не равна нулю, то МЦС существует. Доказательство: Пусть скорость точки А не равна нулю, > 0.Определение скорости точки плоской фигуры с помощью МЦС
, т.к. Таким образом, скорости точек тела при его плоском движении распределяются так…Ускорения точек при плоском движении.
Рис. 2.30Мгновенный центр ускорений (МЦУ)
Если в данный момент времени задано ускорение какой-то точки А – , причем и известны, то положение МЦУ определяется следующим образом: Проведем из точки А полупрямую АN под углом к ускорению , отсчитывая этот… На полупрямой отложим отрезок .Частные случаи определения МЦУ.
Например, качение без скольжения колеса по прямолинейному рельсу с постоянной скоростью центра С. Так как , то , то есть точка С – есть МЦУ. Ускорение любой точки, например ВОсновные способы вычисления углового ускорения при плоском движении.
1. Если известен закон изменения угла поворота или угловой скорости от времени, то угловое ускорение определены путем дифференцирования, то есть … . 2. Второй способ применяется в том случае, когда расстояние от точки, ускорение которой известно, до МЦС остается…СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА.
Сложение поступательных движений.
Пусть твердое тело движется поступательно со скоростью относительно системы отсчета 0хуz, которая в свою очередь, движется поступательно со…Сложение вращений вокруг двух параллельных осей.
Рассмотрим случай, когда относительное движение тела является вращением с угловой скоростью вокруг оси , укрепленный на кривошипе вокруг оси с… Если и параллельны, то движение тела будет плоско-параллельным по отношению к… Исследуем отдельно случаи, когда вращения направлены в одну и в разные стороны.Пара вращений.
, то есть . Тогда мгновенный центр скоростей будет, находится в бесконечности и все точки тела в данный момент, будут иметь…Сложение вращений вокруг пересекающихся осей.
Рассмотрим случай сложения вращения вокруг двух пересекающихся осей. Когда абсолютное движение тела является результатом относительного и… Следовательно, результирующие движения тела является движением вокруг… Рис. 2.45 промежутка времени представляет собой элементарный поворот с угловой скоростью вокруг мгновенной оси,…Сложение поступательного и вращательного движений.
Пусть сложное движение тела слагается из вращательного движения вокруг оси Аа с угловой скоростью и поступательного движения со скоростью… Можно видеть, что движение представляет собою (по отношению к плоскости,… Рис. 2.46 всякое плоскопараллельное, будет действительно слагаться из поступательного со скоростью , т.е со скоростью…РАЗДЕЛ ТРЕТИЙ
ДИНАМИКА ТОЧКИ.
Введение в динамику. Законы динамики.
Основные понятия и определения.
Динамикой называется раздел механики, в котором изучаются законы движения материальных тел под действием сил.
Движение тел с чисто геометрической точки зрения было изучено в кинематике. В динамике, в отличие от кинематики, при изучении движения тел принимают во внимание и действующие силы, и инертность самих материальных тел. Понятие о силе, как о величине, характеризующей меру механического взаимодействия материальных тел, было введено в статике. Но при этом в статике, мы считали все силы постоянными. Между тем на движение тела действуют обычно переменные модули и направления, которые при движении тела изменяются. Переменные силы могут определенным образом зависеть от времени, от положения тела и от его скорости.
Инертность – представляет свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил. Если, например, при действии одинаковых сил изменение скорости первого тела происходит медленнее, чем второго, то говорят, что первое тело является более инертным. Степень инертности данного тела зависит от количества заключенного в нем вещества (материи).
Величина, зависящая от количества вещества данного тела и определяющая меру его инертности, называется массой тела. В механике масса «m» рассматривается как величина скалярная, положительная и постоянная для каждого данного тела.
В общем случае движение тела зависит не только от его суммарной массы и приложенных сил; характер движения может еще зависеть от геометрических размеров тела и от взаимного расположения его частиц (то есть распределение масс). Чтобы при первоначальном изучении динамики иметь возможность отвлечься от учета влияния размеров тел и распределения масс, вводят понятие о материальной точке.
Материальной точкой называется материальное тело (тело, имеющее массу), размерами которого при изучении движения можно пренебречь.
Изучение движения одной материальной точки должно предшествовать изучению движения системы точек. Поэтому курс динамики обычно разделяют на динамику точки и динамику системы материальных точек.
Законы динамики.
Первый закон (закон инерции), открытый Галилеем (1633) гласит: изолированная от внешних воздействий материальная точка сохраняет свое… Закон инерции отражает одно из основных свойств материи – пребывать неизменно в движении. Из него следует, что если ,…Задачи динамики для свободной и несвободной материальной точки.
1. Зная закон движения, определить действующую на нее силу (первая задача динамики) 2. Зная действующую силу, определить закон движения точки (вторая или… Решаются обе задачи с помощью уравнения (1) или (3).Дифференциальные уравнения движения точки и их интегрирование.
Прямолинейное движение точки.
Рассмотрим материальную точку, движущуюся прямолинейно под действием приложенной к ней силы . Положение точки на траектории определяется ее координатой х. Основная задача… Рис. 3.1 , найти закон движения точки, тоКриволинейное движение точки.
Рассмотрим свободную материальную точку, движущуюся под действием сил . Проведем неподвижные координатные оси О х у z. Проектируя обе части… (11) Рис. 3.2Общие теоремы динамики точки.
Количество движения и кинетическая энергия точки.
Кинематической энергией (или живой силой) точки называется скалярная величина – . Единицы измерения: а) в системе СиИмпульс силы.
Элементарным импульсом силы называется векторная величина , равная произведению вектора силы на элементарный промежуток времени . (13) Направлен элементарный импульс по линии действия силы. Импульс любой силы за конечный промежуток времени вычисляется…Теорема об изменении количества движения точки.
(16) Уравнение (16) выражает одновременно теорему об изменении количества движения… Пусть точка массы m, движущая под действием силы имеет в момент t=0 скорость V0, а в момент t1 – скорость V1. Умножим…Работа силы. Мощность.
характеризует то действие силы, которым определяется изменения модуля скорости движущей точки. Введем понятие об элементарной работе силы на… ,где (19) Рис. 3.4Теорема об изменении кинетической энергии точки.
Основной закон динамики . Проектируем обе части равенства на касательную к траектории точки М, направленную в сторону движения получим:Теорема об изменении момента количества движения
Иногда при изучении движения точки вместо изменения самого вектора (m) оказывается необходимым рассматривать изменение его момента. Момент вектора… Рис. 3.6Прямолинейные колебания точки
Рассмотрим точку М, движущуюся под действием одной только восстанавливающей силы F, направленной к неподвижному центру и пропорциональной расстоянию… Проекции силы на ось Ox будет равна Сила, как видим, стремится вернуть точку в равновесное положение О, гдеСвободные колебания при сопротивлении, пропорциональном скорости (затухающие колебания)
(«–» указывает, что R против v). Пусть на точку при её движении действует восстанавливающая сила и сила сопротивления. Тогда. Дифференциальное уравнение будетВынужденные колебания. Резонанс.
(43) Эта сила называется возмущающей силой, колебания, происходящие при действии… Возмущающая сила может изменяться и по другому закону. Мы ограничимся, когда возмущающая сила изменяется по…РАЗДЕЛ ЧЕТВЕРТЫЙ.
ДИНАМИКА СИСТЕМЫ И ТВЕРДОГО ТЕЛА.
Введение в динамику системы.
Механическая система.
Механической системой материальных точек или тел называется такая их совокупность, в которой положение или движение каждой точки зависит от… Совокупность тел, между которыми нет никаких сил взаимодействия (например,… Внешними называют силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы.…Масса системы. Центр масс.
Движение системы, кроме действующих сил, зависит от ее суммарной массы и распределения масс. Масса системы равна арифметической сумме масс всех… . В однородном поле тяжести, для которого , вес любой частицы тела будет пропорционален ее массе. Поэтому о…Теорема о движении центра масс системы.
Дифференциальные уравнения движения системы.
Рассмотрим систему, состоящую из «n» материальных точек. Выделим какую-нибудь точку системы с массой mк. Обозначим равнодействующие всех приложенных… (2) Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:Теорема о движении центра масс.
(4) Преобразуем левую часть. Из формулы (1/) имеемЗакон сохранения движения центра масс.
1). Пусть сумма внешних сил, действующая на систему, равна нулю . Тогда из уравнения (6) следует, что или .Теорема об изменении количества движения системы.
Количество движения системы.
Количеством движения системы будем называть векторную величину , равную геометрической сумме (главному вектору) количества движения всех точек… (7) Рис. 4.3Теорема об изменении количества движения.
. Последняя сумма по свойству внутренних сил равна нулю. Кроме того, .Закон сохранения количества движения.
1). Пусть сумма всех внешних сил действующих на систему равна нулю: , тогда из уравнения (8) следует, что при этом .Теорема об изменении момента количества движения системы.
Момент инерции тела относительно оси.
Если расстояние h от оси z увеличить на одну и ту же величину, то положение… Рис. 4.5 инерции. Моментом инерции тела (системы) относительно данной оси Оz (осевым моментом инерции) называется…Главный момент количества движения системы.
(13) Аналогично определяются моменты количества движения системы относительно осей… (14)Теорема об изменении главного момента количества движения системы (теорема моментов).
, где - равнодействующие всех внешних и внутренних сил, действующих на данную… Составляя, такие уравнения для всех точек системы и складывая их почленно, получим:Закон сохранения главного момента количества движения.
1). Пусть сумма моментов относительно центра О всех внешних сил, действующих на систему, равна нулю: Тогда из уравнения (18) следует, что при этом К0=const. Таким образом, если сумма моментов относительно данного центра…Теорема об изменении кинетической энергии системы.
Кинетическая энергия системы.
(20) Кинетическая энергия является характеристикой и поступательного и… Если система состоит из нескольких тел, то ееНекоторые случаи вычисления работы.
1). Работа сил тяжести, действующих на систему. Работа силы тяжести, действующая на частицу веса Рк будет равна , где -… ,Теорема об изменении кинетической энергии системы.
, где и – элементарная работа действующих на точку внешних и внутренних сил.…Потенциальное силовое поле и силовая функция.
(33) Вычислить данный интеграл, не зная происходящего движения (то есть… Так как, сила определяющая её проекции на оси координат то силовое поле задаётся уравнениями:Потенциальная энергия
Для потенциальных сил можно вывести понятие о потенциальной энергии, как о величине, «характеризующей запас работы», которым обладает материальная… Потенциальной энергией материальной точки в данном положении М называется…Закон сохранения механической энергии
Тогда для каждой из точек системы работа приложенных сил равна: Следовательно, для всех внешних и внутренних сил:ОГЛАВЛЕНИЕ
| Стр. | |
| Предисловие ….………………………………………………………………………… | |
| РАЗДЕЛ ПЕРВЫЙ | |
| СТАТИКА ТВЕРДОГО ТЕЛА | |
| 1. Введение ..…………………………………………………………………………….. | |
| 1.1. Основные понятия статики ..………………………………………………………. | |
| 1.2. Аксиомы статики …………………………………………………………………… | |
| 1.3. Несвободное твердое тело …………………………………………………………. | |
| 2. Плоская система сил .………………………………………………………….…… | |
| 2.1. Система сходящихся сил…………………………………………………………… | |
| 2.1.1 Равновесие твёрдого тела, к которому приложена система сходящихся сил.… | |
| 2.1.2. Теорема о трех не параллельных силах…………………………………………. | |
| 2.1.3. Момент силы относительно точки……………………………………………… | |
| 2.1.4. Теорема Вариньона……………………………………………………………….. | |
| 2.2. Произвольная плоская система сил ..……………………………………………… | |
| 2.2.1 Равновесие твёрдого тела при наличии плоской системы сил. Случай параллельных сил………………………………………………………………………... | |
| 2.2.2. Теорема о параллельном переносе силы ………………………………………. | |
| 2.2.3. Приведение плоской системы сил к данному центру………………………….. | |
| 2.2.4.Условия равновесия произвольной плоской системы сил …………………….. | |
| 3. Пространственная система сил................................................................................. | |
| 3.1. Системы сходящихся сил .......................................................................................... | |
| 3.2. Произвольная пространственная система сил…………………………………… | |
| 3.2.1. Момент силы относительно точки. Момент силы относительно оси. Теория пар в пространстве……………………………………………………………………… | |
| 3.2.2. Зависимость между моментом силы относительно центра и относительно оси… | |
| 3.3.3. Главные векторы сил и моментов…………………………………………………... | |
| 3.2.4. Приведение пространственной системы сил к заданному центру ..……………… | |
| 3.2.5. Вычисление главного вектора и главного момента пространственной системы сил …………………………………………………………………………………………… | |
| 3.2.6. Условия и уравнения равновесия пространственной системы сил .……………… | |
| 4. Центр тяжести ………………………………………………………………………… | |
| РАЗДЕЛ ВТОРОЙ | |
| КИНЕМАТИКА | |
| 1.Введение .………………………………………………………………………………… | |
| 2. Движение точки………………………………………………………………………… | |
| 2.1. Способ задания движения ..…………………………………………………………… | |
| 2.2. Скорость точки ..…………. …………………………………………………………… | |
| 2.3. Ускорение точки .…………………….………………………………………………… | |
| 3. Простейшие движения твердого тела ..……………………………………………… | |
| 3.1. Поступательное движение тела .……………………………………………………… | |
| 3.2. Вращательное движение твердого тела ……………………………………………… | |
| 3.2.1.Скорость и ускорение точки твердого тела, вращающегося вокруг неподвижной оси … ………………………………………………………………… | |
| 4.Сложное движение точки………………………………………………………………. | |
| 4.1.Основные понятия ..…………………………………………………………………… | |
| 4.2.Сложение скоростей …………………………………………………………………… | |
| 4.3. Сложение ускорений. Теорема Кориолиса…………………………………………… | |
| 5. Плоское движение твердого тела .…………………………………………………… | |
| 5.1. Введение………………………………………………………………………………… | |
| 5.2. Скорости точек тела при плоском движении ...……………………………………… | |
| 5.3. Мгновенный центр скоростей (МЦС) ...……………………………………………… | |
| 5.4. Ускорения точек при плоском движении…………………………………………….. | |
| 5.5. Мгновенный центр ускорений (МЦУ) ..……………………………………………… | |
| 6. Сложное движение твердого тела .…………………………………………………… | |
| 6.1. Сложение поступательных движений………………………………………………… | |
| 6.2. Сложение вращений вокруг двух параллельных осей……………………………..... | |
| 6.3. Пара вращений………………………………………………………………………… | |
| 6.4. Сложение вращений вокруг пересекающихся осей………………………………… | |
| 6.5. Сложение поступательного и вращательного движений…………………………… | |
6.5.1. Скорость поступательного движения перпендикулярно к оси вращения (┴ ) )
| |
6.5.2. Винтовое движение ( ) ………………………………………………………… ) …………………………………………………………
| |
| 6.5.3. Скорость поступательного движения образует произвольный угол с осью вращения ……..……………………………………………………………………… | |
| РАЗДЕЛ ТРЕТИЙ | |
| ДИНАМИКА ТОЧКИ. | |
| 1. Введение в динамику. Законы динамики…………………………………………… | |
| 1.1. Основные понятия и определения…………………………………………………… | |
| 1.2. Законы динамики……………………………………………………………………… | |
| 1.3. Задачи динамики для свободной и несвободной материальной точки .…………… | |
| 2. Дифференциальные уравнения движения точки и их интегрирование………… | |
| 2.1. Прямолинейное движение точки……………………………………………………… | |
| 2.2. Криволинейное движение точки……………………………………………………… | |
| 3. Общие теоремы динамики точки ..…………………………………………………… | |
| 3.1. Количество движения и кинетическая энергия точки .……………………………… | |
| 3.2. Импульс силы ..………………………………………………………………………… | |
| 3.3. Теорема об изменении количества движения точки………………………………… | |
| 3.4. Работа силы. Мощность .……………………………………………………………… | |
| 3.5. Теорема об изменении кинетической энергии точки ..……………………………… | |
| 3.6. Теорема об изменении момента количества движения (теорема моментов)……… | |
| 4. Прямолинейные колебания точки…………………………………………………… | |
| 4.1. Свободные колебания без учёта сил сопротивления………………………………… | |
| 4.2. Свободные колебания при сопротивлении, пропорциональном скорости (затухающие колебания) …………………………………………………………………… | |
| 4.3. Вынужденные колебания. Резонанс .………………………………………………… | |
| РАЗДЕЛ ЧЕТВЕРТЫЙ. | |
| ДИНАМИКА СИСТЕМЫ И ТВЕРДОГО ТЕЛА. | |
| 1. Введение в динамику системы ..……………………………………………………… | |
| 1.1. Механическая система ………………………………………………………………… | |
| 1.2. Масса системы. Центр масс…………………………………………………………… | |
| 2. Теорема о движении центра масс системы………………………………………… | |
| 2.1. Дифференциальные уравнения движения системы .………………………………… | |
| 2.2. Теорема о движении центра масс .…………………………………………………… | |
| 2.3. Закон сохранения движения центра масс .…………………………………………… | |
| 3. Теорема об изменении количества движения системы…………………………… | |
| 3.1. Количество движения системы ..……………………………………………………… | |
| 3.2. Теорема об изменении количества движения ..……………………………………… | |
| 3.3. Закон сохранения количества движения……………………………………………… | |
| 4. Теорема об изменении момента количества движения системы............................. | |
| 4.1. Момент инерции тела относительно оси …..………………………………………… | |
| 4.2. Главный момент количества движения системы .…………………………………… | |
| 4.4. Закон сохранения главного момента количества движения .………………………… | |
| 5. Теорема об изменении кинетической энергии системы.............................................. | |
| 5.1. Кинетическая энергия системы .……………………………………………………….. | |
| 5.2. Некоторые случаи вычисления работы ..……………………………………………… | |
| 5.3. Теорема об изменении кинетической энергии системы……………………………… | |
| 5.4. Потенциальное силовое поле и силовая функция…………………………………….. | |
| 5.5. Потенциальная энергия…………………………………………………………………. | |
| 5.6. Закон сохранения механической энергии ..…………………………………………… | |
| Библиографический список ………………………………………………….. |
– Конец работы –
Используемые теги: раздел, Теоретическая, Механика0.068
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Раздел Теоретическая механика
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.162 сек.
Новости и инфо для студентов