Кинетическая энергия системы. - раздел Механика, Раздел Теоретическая механика Кинетической Энергией Системы Называется Скалярная Величина Т, Равная Арифмет...
Кинетической энергией системы называется скалярная величина Т, равная арифметической сумме кинетических энергий всех точек системы.
 (20)
(20)
Кинетическая энергия является характеристикой и поступательного и вращательного движения системы. Кинетическая энергия является скалярной величиной и при том положительной. Она зависит от направлений движений и не характеризует изменений этих направлений. На изменение кинетической энергии влияет действие внешних и внутренних сил.
Если система состоит из нескольких тел, то ее
 .
.
Поступательное движение. В этом случае все точки тела движутся с одинаковыми скоростями, равными скорости движения центра масс. Следовательно, для любой точки Vк = Vс и формула (19) дает
 или
или
 , (21)
, (21)
где М – масса тела,
Vс – скорость центра масс.
Вращательное движение.
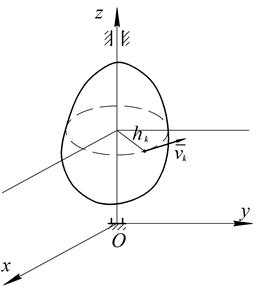
Рис. 4.8
 ,
,
где hк – расстояние точки от оси вращения,
 - угловая скорость.
- угловая скорость.
Подставляя в (17), получим:

 .
.
 (22)
(22)
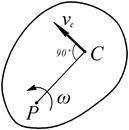
Плоскопараллельное движение.
При этом движении скорости всех точек в каждый момент времени распределены так, как если бы тело вращалось вокруг оси, перпендикулярной к плоскости движения и проходящей через мгновенный центр скоростей Р. Следовательно по формуле (21)
 (23)
(23)
 IР – момент инерции относительно названной оси,
IР – момент инерции относительно названной оси,
- угловая скорость тела.
Величина IР – будет переменной, так как положение центра Р при движении тела все время меняется. Введем вместо IР постоянный момент инерции Iс, относительно оси, проходящей через центр масс С тела. По теореме Гюйгенса  . Подставим IР в (19/).
. Подставим IР в (19/).
Рис. 4.9 Учитывая, что точка Р – мгновенный центр скоростей и следовательно  , где Vс – скорость центра масс С. Окончательно:
, где Vс – скорость центра масс С. Окончательно:
 (24)
(24)
Следовательно, при плоскопараллельном движении кинетическая энергия тела равна энергии поступательного движения со скоростью центра масс, сложенной с кинетической энергией вращательного движения вокруг центра масс.
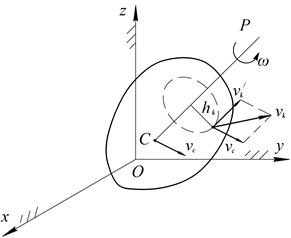 Общий случай движения.
Общий случай движения.
Если за полюс взять центр масс С тела, то движение тела в общем случае будут слагаться из поступательного движения со скоростью Vс и из вращения вокруг мгновенной оси СР, проходящей через этот полюс. Тогда скорость в любой точке  ,
,
 , hк – расстояние точки от оси СР, - абсолютная угловая скорость.
, hк – расстояние точки от оси СР, - абсолютная угловая скорость.

Рис. 4.10 и учитывая, что

 - масса тела,
- масса тела,
 - момент инерции относительно мгновенной оси,
- момент инерции относительно мгновенной оси,
 , так как она представляет количество движения, получаемое телом при его вращении вокруг оси ОР, проходящей через центр масс тела.
, так как она представляет количество движения, получаемое телом при его вращении вокруг оси ОР, проходящей через центр масс тела.
Окончательно получаем:
 (25)
(25)
Кинетическая энергия равна кинетической энергии поступательного движения со скоростью центра масс, сложенной с кинетической энергией вращательного движения вокруг оси, проходящей через центр масс.
Все темы данного раздела:
Аксиомы статики.
Данные аксиомы сформулированы на основе наблюдения и изучения окружающих нас явлений реального мира. Некоторые основные законы механики Галилея – Ньютона являются одновременно и акс
Система сходящихся сил
2.1.1 Равновесие твёрдого тела, к которому приложена система сходящихся сил.
Сходящимися называются силы, линии, действия которых пересекаются в одной точке.
Теорема. Систе
Произвольная плоская система сил
2.2.1 Равновесие твёрдого тела при наличии плоской системы сил. Случай
параллельных сил.
Равнодействующая двух параллельных сил, направленных в одну сторону,
равна по мод
Системы сходящихся сил.
Равнодействующую пространственной системы сил можно определить, построив пространственный многоу
Произвольная пространственная система сил.
3.2.1. Момент силы относительно точки. Момент силы относительно оси. Теория пар в пространстве.
В случае плоской системы сил момент силы относительно точки определён как алгебраическая вел
ЦЕНТР ТЯЖЕСТИ.
Сила тяжести – равнодействующая сил притяжения к Земле, она распределена
по всему объёму тела. Силы притяжения, приложенные к частицам твёрдого
тела, образуют систему сил,
КИНЕМАТИКА.
1. ВВЕДЕНИЕ
Кинематикой называется раздел механики, в котором изучается движение материальных точек и тел в пространстве с геометрической точ
Поступательное движение тела.
Поступательным движением твердого тела называется такое движение, при котором любая прямая, пров
Вращательное движение твердого тела.
Вращательным называется такое движение твердого тела, при котором точки тела движутся в плоскостях, перпендикулярных неподвижной прямой, называемой осью вращения тела, и описывает окружности, центр
Уравнения равномерного вращения тела
Вращение тела с постоянной угловой скоростью называется равномерным
Проинтегр
Уравнения равнопеременного вращения тела
Вращение тела, при котором угловое ускорение постоянно, называется равнопеременным вращением.
Если величина
Сложение скоростей.
Рассмотрим точку М, совершающую сложное движение. Пусть эта точка, двигаясь вдоль своей относительной траектории АВ, совершает за промежуток времени
Сложение ускорений. Теорема Кориолиса.
Найдем зависимость между абсолютным , относительным
Мгновенный центр скоростей (МЦС)
МЦС называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
Теорема. Если угловая скорость плоской фигуры не равна нулю, то МЦС существует.
До
Определение скорости точки плоской фигуры с помощью МЦС
Выберем за полюс точку Р. Тогда скорость произвольной точки А
, т.к.
Ускорения точек при плоском движении.
Покажем, что ускорение любой точки М тела при плоском или параллельном движении (так же как и скорость) складывается из ускорений, которые она получает в поступательном и во вращательном дви
Мгновенный центр ускорений (МЦУ)
МЦУ называется точка плоской фигуры, ускорение которой равно нулю.
Если в данный момент времени задано ускорение какой-то точки А –
Частные случаи определения МЦУ.
1. Известна точка, ускорение которой равно нулю. Эта точка и является МЦУ.
Например, к
Основные способы вычисления углового ускорения при плоском движении.
1. Если известен закон изменения угла поворота или угловой скорости от времени, то угловое ускорение
Сложение поступательных движений.
Пусть твердое тело движется поступательно со скоростью
Сложение вращений вокруг двух параллельных осей.
Рассмотрим случай, когда относительное движение тела являет
Пара вращений.
Рассмотрим частный случай, когда вращения вокруг параллельных осей направлены в разные стороны, но по модулю
Сложение вращений вокруг пересекающихся осей.
Рассмотрим случай сложения вращения вокруг двух пересекающихся осей. Когда аб
Сложение поступательного и вращательного движений.
6.5.1. Скорость поступательного движения перпендикулярно к оси вращения (┴
Законы динамики.
В основе динамики лежат законы, установленные путем обобщения результатов целого ряда опытов и наблюдений. Систематически эти законы впервые изложены И. Ньютоном в его классическом сочинении «Матем
Задачи динамики для свободной и несвободной материальной точки.
Для свободной материальной точки задачами динамики являются:
1. Зная закон движения, определить действующую на нее силу (первая задача динамики)
2. Зная действующую силу, определи
Прямолинейное движение точки.
Из кинематики известно, что при прямолинейном движении скорость и ускорение точки все время направлены вдоль одной и той же прямой. Так как направление ускорения совпадает с направлением действия с
Криволинейное движение точки.
Рассмотрим свободную материальную точку, движущуюся под действием сил
Количество движения и кинетическая энергия точки.
Это основные динамические характеристики движения. Количеством движения точки называется векторная величина
Импульс силы.
Для характеристики действия, оказываемого на тело силой за некоторый промежуток времени, вводим понятия об импульсе силы.
Элементарным импульсом силы называется векторная величина
Теорема об изменении количества движения точки.
Так как масса точки постоянна, а ее ускорение , то уравнение (3) (
Работа силы. Мощность.
Для характеристики действия, оказываемое силой на тело при некотором его перемещении, вводится
Теорема об изменении кинетической энергии точки.
Рассмотрим точку массой m, перемещающуюся под действием приложенных к ней сил из положения М0, где она имела скорость V0 в положение М1,
Теорема об изменении момента количества движения
(теорема моментов).
Иногда при изучении движения точки вместо изменения самого вектора (m
Прямолинейные колебания точки
4.1. Свободные колебания без учёта сил сопротивления.
Рассмотрим точку М, движущуюся под действием одной только восстанавливающей силы F, направленной к непо
Свободные колебания при сопротивлении, пропорциональном скорости (затухающие колебания)
Рассмотрим, как влияет на свободные колебания сопротивления среды, считая, что сила сопротивления пропорциональна первой степени скорости:
Вынужденные колебания. Резонанс.
Рассмотрим случай колебаний, когда на точку, кроме восстанавливающей силы F, действует ещё периодически изменяющаяся со временем сила
Механическая система.
Механической системой материальных точек или тел называется такая их совокупность, в которой положение или движение каждой точки зависит от положения и движения всех остальных. Мате
Масса системы. Центр масс.
Движение системы, кроме действующих сил, зависит от ее суммарной массы и распределения масс. Масса системы равна арифметической сумме масс всех точек или тел, обр
Дифференциальные уравнения движения системы.
Рассмотрим систему, состоящую из «n» материальных точек. Выделим какую-нибудь точку системы с массой mк. Обозначим равнодействующие всех приложенных к точке
Теорема о движении центра масс.
Сложим почленно левые и правые части уравнения (3).
(4)
Преобразуем ле
Закон сохранения движения центра масс.
Из теоремы о движении центра масс можно получить важные следствия.
1). Пусть сумма внешних сил, действующая на систему, равна нулю
Количество движения системы.
Количеством движения системы будем называть векторную величину , равную геометр
Теорема об изменении количества движения.
Рассмотрим систему, состоящую из «n» материальных точек, составим для этой системы дифференциальные уравнения движения (2) и сложим их почленно
Закон сохранения количества движения.
Из теоремы об изменении количества движения системы можно получить важные следствия.
1). Пусть сумма всех внешних сил действующих на систему равна нулю:
Момент инерции тела относительно оси.
Положение центра масс характеризует распределение масс системы не полностью.
Главный момент количества движения системы.
Главным моментом количества движения (или кинематическим моментом) системы относительно данного центра О называется величина К0, равная геометрической сумме моментов количе
Теорема об изменении главного момента количества движения системы (теорема моментов).
Теорема моментов, доказанная для одной материальной точки, будет справедлива для каждой из точек системы. Следовательно, если рассмотреть точку системы с массой mк, имеющую скорос
Закон сохранения главного момента количества движения.
Из теоремы моментов можно получить следующие важные следствия.
1). Пусть сумма моментов относительно центра О всех внешних сил, действующих на систему, равна нулю:
Некоторые случаи вычисления работы.
Рассмотрим следующие случаи.
1). Работа сил тяжести, действующих на систему.
Работа силы тяжести, действующая на частицу веса Рк будет равна
Теорема об изменении кинетической энергии системы.
Показанная в п. 3.5. теорема справедлива для любой точки системы. Следовательно, если рассмотреть какую-нибудь точку системы с массой mк имеющую скорость Vк, то
Потенциальное силовое поле и силовая функция.
Работа на перемещениесилы F приложенной в точке
Потенциальная энергия
Для потенциальных сил можно вывести понятие о потенциальной энергии, как о величине, «характеризующей запас работы», которым обладает материальная точка в данном пункте силового пол
Закон сохранения механической энергии
Допустим, что все действующие на систему внешние и внутренние силы потенциальны.
Тогда для каждой из точек системы работа приложенных сил равна:







Новости и инфо для студентов