рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Биомеханическая мышечная работа
Реферат Курсовая Конспект
Биомеханическая мышечная работа
Биомеханическая мышечная работа - раздел Механика, Биомеханика Работа Любой Мышцы Человеческого Опорно-Двигательного Аппарата Основаны На Ум...
Работа любой мышцы человеческого опорно-двигательного аппарата основаны на умении и возможности мышцы сокращаться. В момент мышечного сокращения сама мышца укорачивается, а обе точки крепления к костям сближаются одна относительно другой. Подвижная точка Insertionначинает приближаться к начальной неподвижной точке крепления Origin, так осуществляется движение данной конечности.
Если применить это качество и свойство мышечной материи к области фитнеса, то открывается возможность выполнения определенной механической работы (подъем штанги, перемещение конечности с гантелей), прилагая разную степень мышечного усилия. Мышечная сила в данном случае будет определяться площадью сечения мышечных волокон, или говоря простым языком площадью разреза мышцы в поперечнике. Размер мышечного сокращения определен длиной мышечного волокна. Соединения костей и взаимодействие с мышечными группами устроено в форме механического рычага, позволяющего выполнять простейшую работу по поднятию и передвижению предметов.
Механика учит нас, что чем дальше от оси будет приложена сила, тем выше кпд, ибо благодаря большому плечу рычага, работу можно выполнить с меньшими усилиями. Так и в биомеханике – если мышца крепится дальше от опорной точки, тем более выгодно будет использована ее сила. П.Ф. Лесгафт в этом смысле квалифицировал мышцы на сильные, имеющие крепление дальше от опорной точки и быстрые или ловкие, имеющие точку крепления вблизи опоры.
Мышечное движение всегда производится в двух противоположных направлениях. По этой причине для выполнения двигательного процесса вокруг одной опорной точки необходимо наличие двух мышц на противоположных сторонах одна от другой. Направления движения в биомеханике тоже получили свои определения: сгибаниеи разгибание, приведениеи отведение, горизонтальное приведение и горизонтальное отведение, ротация медиальная и ротация латеральная.
Мышца, которая вызывает момент движения при сокращении и принимает на себя основную нагрузку, называется агонистом - Prime mover. Каждое сокращение мышцы-агониста приводит к полному расслаблению противоположной ей мышцы-антагониста. Если мы выполняем сгибание в локте, агонистом будет являться сгибатель локтя – бицепс, а антагонистом в этот момент будет разгибатель локтя – трицепс. После окончания движения обе мышцы будут уравновешивать друг друга, находясь в немного растянутом состоянии. Это явление называется мышечным тонусом. Мышцы, помогающие выполнять движение мышце-агонисту и действующие в одном с ним направлении, но испытывающие меньшую нагрузку и меньшую степень сокращения называются синергистами. Мышцы, обеспечивающие устойчивость и равновесие определенному суставу при выполнении движения, называются фиксаторами.
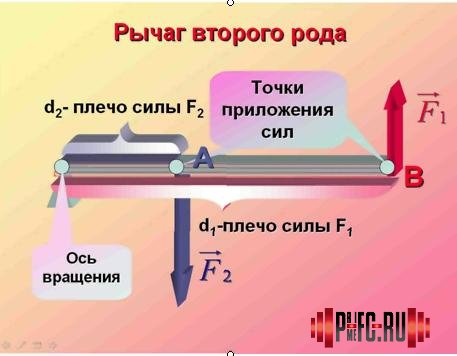
В любой момент движения, кости образуют механические рычаги, следуя за мышечными командами. Биомеханика выделяет три вида биомеханических рычагов – рычаг 1 рода, где точки приложения силы расположены с противоположных сторон от оси и рычаг 2 рода, где точки приложения силы располагаются по одну сторону от оси, но на разном от нее расстоянии. Поэтому здесь применимы два вида рычага, условно называемые «рычаг силы» и «рычаг скорости».
Рассмотрим виды рычагов более подробно:
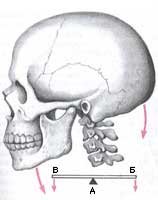
Рычаг 1 рода называется в биомеханике «рычагом равновесия». Поскольку точка опоры расположена между двумя точками приложения силы, рычаг еще называют «двуплечим». Такой рычаг нам демонстрирует соединения позвоночника и черепной коробки. Если вращающий момент силы, действующей на затылочную часть черепа равен вращающему моменту силы тяжести, действующему на переднюю часть черепа,и они имеют одинаковое плечо рычага, достигается равновесие. Нам удобно, мы не замечаем разнонаправленного действия, и мышцы не напряжены.

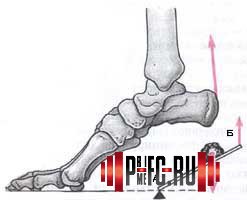
Рычаг 2 рода в биомеханике подразделяется на два вида. Название и действие этого рычага зависят от места расположения приложения нагрузки, но у рычагов обеих видов точка приложения силы точка приложения сопротивления находятся по одну сторону от точки опоры, поэтому оба рычага являются «одноплечими». Рычаг силыобразуется при условии, что длина плеча приложения силы мышц длиннее плеча приложения силы тяжести (сопротивления). В качестве наглядного примера можно продемонстрировать человеческую стопу. Осью вращения здесь являются головки плюсневых костей, пяточная кость служит точкой приложения силы, а тяжесть тела образует сопротивление в голеностопном суставе. Здесь имеет место выигрыш в силе, за счет боле длинного плеча приложения силы и проигрыш в скорости. Рычаг скорости имеет более короткое плечо приложения мышечной силы, чем плечо силы противодействия (силы тяжести). Примером может служить работа мышц сгибателей в локтевом суставе. Бицепс крепится вблизи точки вращения (локтевой сустав) и с таким коротким плечом необходима дополнительная сила мышце сгибателю. Здесь имеет место выигрыш в скорости и ходе движения, но проигрыш в силе. Можно заключить, что чем ближе от места опоры будет крепиться мышца, тем короче будет плечо рычага и тем значительнее будет проигрыш в силе.


При соединении двух костных пар образуется биокинетическая пара, характер движения в которой определяется строением костного сочленения (сустава), работой мышц, сухожилий и связок. Подвижность в суставе может зависеть от многочисленных факторов: пола, возраста, генетического строения, состояния ЦНС.

Для того чтобы оптимально и правильно принять исходное положения для выполнения упражнений необходимо напрямую руководствоваться знанием законов рычагов первого и второго типов. Если мы изменим, положение конечности или туловища, то в свою очередь определенным образом изменится длина плеча рычага конечности или туловища. В любом случае всегда исходное положение выбирается таким образом, чтобы начальный период тренировки сопровождался менее нагрузочными положениями конечностей и корпуса. В дальнейшем, в зависимости от состояния и формы тренирующегося, можно постепенно увеличивать длину плеча рычага, для усиления воздействия на определенную мышечную группу. Увеличение силы противодействия одновременно с удлинением плеча рычага в свою очередь еще больше акцентирует внимание на укрепление силы конкретной мышечной группы или одной мышцы.
Для осуществления технически грамотного движения в момент выполнения упражнения, необходимо и важно знать, в каком направлении работает сустав, соединяющий активную мышечную группу. Здесь нам необходимо опять обратиться к анатомическим плоскостям. Опорно-двигательный аппарат человека представляет собой различные костные сочленения, соединенные друг с другом посредством суставов. Тело человека может свободно перемещаться в шести направлениях: вперед и назад, вправо и влево, вверх и вниз. Определенная классификация суставов позволяет движения в этих направлениях.
В зависимости от того, какое исходное положение принимает тренирующийся, выполнение определенного упражнения может усложняться или облегчаться. Поэтому общая эффективность тренировки также зависит от исходного положения в выполнении упражнения. В фитнесе мы применяем следующие исходные положения: положение лежа – самое простое и легкое, положение, сидя – менее легкое и положение стоя – с малой площадью опоры и поэтому достаточно сложное для удержания равновесия.
Для сглаживания разбалансировки в положениях тела с неустойчивым равновесием используются упоры. Очень распространенным является упор лежа. Это закрытая кинематическая цепь, поскольку все части тела замкнуты. Устойчивость и равновесие имеют достаточно высокую степень, центр тяжести расположен низко, площадь опоры большая.
Для примера верхней опоры могут послужить висы. Висы тоже считаются достаточно устойчивыми. Тело человека испытывает силу растяжения под тяжестью собственного веса. Руки прямые и соприкасаются с опорой в фиксировано положении. Вис является силовым упражнением уже сам по себе. Подтягивания на перекладине являются сложным силовым упражнением, которое может выполнить только подготовленный спортсмен с сильно развитыми мышцами верхнего пояса и верхних конечностей. В таком положении любая двигательная активность является сложновыполнимой, поэтому можно использовать опору для ног.
Ходьба – повседневная двигательная активность человека. Это попеременное движение ног. Одна нога служит опорой в тот момент, когда другая находится в воздухе и движется вперед. Ноги поочередно сменяют друг друга, меняя последовательно опорную фазу на двигательную.
Бег – быстрые циклические шаги, требующие от опорно-двигательного аппарата достаточно больших энергозатрат, напряжения центральной нервной системы, хорошей физической формы. Измеряется длиной шага, скоростью бега и длительностью временного промежутка.
Приседания – выполняются мышцами нижних конечностей. Площадь опоры достаточно мала, равновесие не обладает достаточной устойчивостью. При опоре руками выполнение приседаний значительно облегчается. Чем приседания глубже, тем они тяжелее. Усложнение упражнений осуществляется за счет темпа и числа приседаний, возможно дополнительное отягощение на плечи.
Прыжки – это поочередные отталкивания тела от площади опоры. Главную работу выполняют мышцы нижних конечностей, мышцы туловища и рук участвуют в движении, обеспечивая вспомогательную функцию.
– Конец работы –
Эта тема принадлежит разделу:
Биомеханика
Биомеханика... Название включает в себя греческие слова bios жизнь и mexane механизм рычаг В отличие от традиционной механики в которой рассматривается...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Биомеханическая мышечная работа
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов