Механические свойства биологических тканей
Тело человека – композиционный материал, основа которого скелет, окруженный мягкими тканями. Сами кости также являются композиционным материалом.
Костная ткань.
2/3 массы кости занимает гидроксилопатит: 3Са3(РО4)2 · Са(ОН)2 + коллаген.
Механическая плотность костной ткани ρ = 2400 кг/см3.
Е = 10 ГПа.
σв = 150 МПа (предел прочности).

ОА – упругая деформация
АВ – процесс ползучести
ВС – упругая деформация при снятии нагрузки
СД – обратная ползучесть
Кожа.
Состоит из коллагена (75% сухой массы) и 4% эластина (по свойствам похож на резину), а также жира и соединительной ткани.
Эластин растягивается на 200-300%, коллаген на 10%.
| Материал | Модуль упругости, МПа | Предел прочности, МПа |
| Коллаген | 10-100 | |
| Эластин | 0,1-0,6 |
Мышцы.
В основном состоят из молекул миозина и актина.
Мышцы делят на:
- поперечно-полосатые;
- гладкие.
Гладкие мышцы образуют полые органы.
 σ скелетная мышца
σ скелетная мышца
гладкие мышцы
 Скелетная мышца и сердечная мышца
Скелетная мышца и сердечная мышца
являются поперечно-полосатыми.
ε
 § 13.2. Моделирование механических свойств биологических объектов
§ 13.2. Моделирование механических свойств биологических объектов
Известен элемент, моделирующий упругие и пластичные свойства, - это пружина.
 |
σ
 - закон Гука.
- закон Гука.
В качестве модели вязкого тела используют поршень, передвигающегося в цилиндре.
 |
σ
 - закон вязкого сопротивления
- закон вязкого сопротивления
µ - коэффициент дин. вязкости.
Деформацию, сочетающую вязкость и упругость, характерные для полимеров и биологических тканей, называют вязко-упругой.
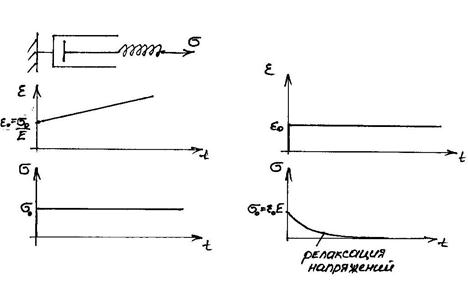 1. Модель Максвелла (заключается в том, что 2 элемента соединяются последовательно) (соответствуют гладкие мышцы).
1. Модель Максвелла (заключается в том, что 2 элемента соединяются последовательно) (соответствуют гладкие мышцы).
Продифференцируем уравнение (1):

ε = εупр + εвязк ,  (3) + (4) :
(3) + (4) :

1 случай:
Пусть σ = σ0 = const
Из (5) → 

Интегрируем с начальными условиями:
при t = 0 

2 случай:
Если ε = ε0 = const (напряжения будут релаксироваться)


НУ: при t = 0 σ0 = ε0Е
Тогда lnC = lnσ0


2. Модель Фойгта(параллельное соединение).

В этом случае складываются не усилия, а перемещения.
σ = σупр + σвяз (10)
Пусть σ = σ0 = const
Используя (1), (2) и (10):

ГУ: Пусть при t = 0, ε = 0.


Отсюда  или
или 
ε 
σ0/Е
ε1
t1 t
σ
σ0
t
Из (13) при t = t1:

В соответствии с (11):


При t = t1, ε = ε1, тогда

→ 
или 
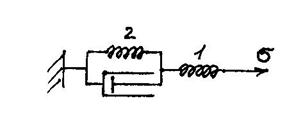
3. Смешанная модель.
При движении постоянной нагрузки:
ε 
B
A
C
O D
t
ОА – упругая деформация пружины 1; АВ – вязко-упругая деформация двух параллельных соединенных пружин.
В точке В σ = 0.
σ 
σ0
t
ВС – упругая деформация пружины 1.
СД – релаксация напряжений.