Механические процессы в опорно-двигательном аппарате. Уравнение Хилла
Механические сокращения принято разделять на:
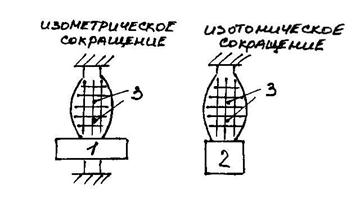
- изометрические (при которых длина остается постоянной)
- изотонические (при которых остается постоянной сила, развиваемая мышцей).
 Чаще всего меняется и сила, и длина.
Чаще всего меняется и сила, и длина.
1 – тугая пружина с датчиком силы
2 – свободно поднимаемый груз
3 – электроды для стимуляции двигательного нерва
Хилл установил связь между силой и скоростью.
(ρ + а) υ = в (ρ0 – ρ) (уравнение Хилла)
ρ – нагрузка (усилие, развиваемое мышцей в изотоническом режиме)
ρ0 – максимальная нагрузка, которую может удержать мышца, не поднимая ее
υ – максимальная скорость при данной нагрузке ρ при изотоническом сокращении мышцы.
υ
При ρ = 0 υmax

При ρ = ρ0 υ = 0
Мощность: p0 p

W = Wмах при 
Т.к. а ≈ 0,3 ρ0, то Wмах ≈ 0,3 ρ0
Особенности прикрепления.
Мышцы со скелетом образуют рычаги, которые принято разделять на 2 вида:
- рычаги скорости (проигрываем в силе)
 - рычаги силы
- рычаги силы
Рычаг силы:
Условие равновесия:
Fa = ρ · в

 , т.к. в < а.
, т.к. в < а.
Рычаг скорости:
Условие равновесия:
Fa sinα = ρ · в

Кость опорно-двигательного аппарата сочленяется суставами. Основная характеристика сустава – число степеней свободы (т.е. число независимых осей, вокруг которых может вращаться сочленение костей).