рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Электротехника
- /
- Регулирование механических координат электропривода
Реферат Курсовая Конспект
Регулирование механических координат электропривода
Регулирование механических координат электропривода - раздел Электротехника, ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА Управление Движением Электропривода Связано С Принудительным, В Соответствии ...
Управление движением электропривода связано с принудительным, в соответствии с технологическими требованиями, изменением (регулированием) одной или нескольких его механических координат. Анализируя механическую часть электропривода (рис. 1), можно отметить два возможных способа их регулирования:
1 - изменением параметров механического преобразователя, например, передаточного отношения или радиуса приведения кинематических звеньев;
2 - изменением механических характеристик электромеханического преобразователя, например, за счет воздействия на параметры его питающей сети (напряжения, тока, частоты).
Первый способ требует применения более сложных и менее надежных механических устройств и трудно поддается автоматизации. Второй - отличается большей гибкостью в управлении и лучшими технико-экономическими показателями. Для ряда рабочих машин (например, металлорежущих станков) технически обоснован комбинированный, сочетающий оба способа, метод регулирования координат.
Регулирование координат характеризуется рядом обобщенных показателей, к числу которых относятся направление регулирования, точность, плавность, диапазон, ограничение нагрузок привода, динамические показатели качества и экономичность регулирования.
Направление регулирования определяется направлением изменения координаты х относительно ее естественного состояния хе. Так, при увеличении координаты, речь идет о регулировании вверх от основного (естественного) состояния, а при снижении - вниз от основного. Если возможно изменение в обоих направлениях, говорят о двухзонном регулировании.
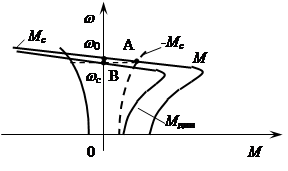
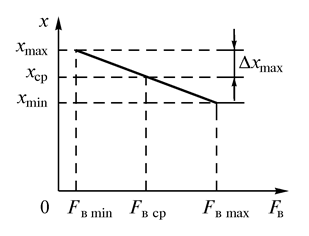
Точность регулирования определяется отношением изменения регулируемой координаты при изменении возмущения в заданном диапазоне к ее среднему значению. Оценкой точности может быть отношение максимального отклонения координаты Dхmax к ее среднему значению хср:
Dхmax/хср = (хmax - хmin)/(хmax + хmin), где хmax и хmin - максимальное и минимальное значения координаты при заданных пределах изменения возмущений Fв.max и Fв. Min ( рис. 2.10).
Плавность регулирования определяется коэффициентом плавности,
который представляет собой отношение текущего хi значения координаты к разности двух хi и хi-1 соседних ее значений:
kпл = хi / ( хi- хi-1).
Чем выше kпл , тем выше плавность регулирования.
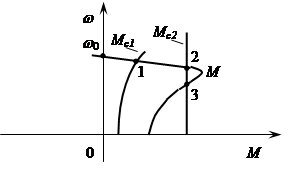
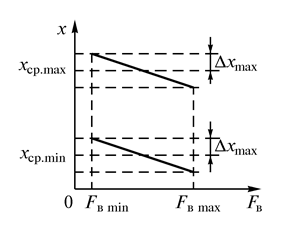
Диапазон регулирования определяется отношением средних максимального х ср. max и минимального х ср.min значений регулируемой координаты электропривода ( рис. 2.11) при заданном диапазоне изменения возмущающих воздействий и требуемой точности регулирования:
D = х ср. max / х ср.min .
Ограничение нагрузок привода связано с допустимым (нормативным) нагревом силовых элементов электропривода в процессе регулирования его координат. Так, для двигателя возможны ограничения длительно допустимого момента Мдоп или мощности Рдоп.
Динамические показатели качества регулирования оцениваются его быстродействием, перерегулированием и колебательностью переходного процесса.
Экономичность регулирования характеризуется эксплуатационными затратами, сопровождающими процесс регулирования. В их число входят потери энергии, связанные с потерями мощности, изменением КПД и коэффициента мощности электропривода, а также затраты на дополнительное оборудование, обслуживание привода и т.п. Технико-экономическое обоснование регулируемого электропривода является наиболее ответственным этапом его реализации.
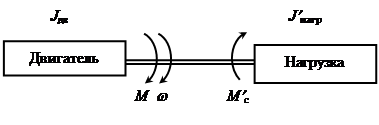 |
Рис.2.1. Механическая система электропривода














– Конец работы –
Эта тема принадлежит разделу:
ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА
На сайте allrefs.net читайте: "ОСНОВЫ МЕХАНИКИ ЭЛЕКТРОПРИВОДА"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Регулирование механических координат электропривода
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.025 сек.
Новости и инфо для студентов