Рархічність засобів обробки радіолокаційної інформації.
Обробка радіолокаційної інформації (РЛІ) як правило складається з декількох етапів.
Первинна обробка РЛІ здійснюється апаратурою радіолокаційної станції (АПОІ РЛС) з видачею інформації про плоти. Для всіх АПОІ РЛС інформація про плоти включає координати цілей (азимут, дальність) як від первинного радіолокатора (ПРЛ), так і від вторинного радіолокатора (ВРЛ), причому АПОИ здійснює об'єднання такої інформації і додаткову інформацію від бортового відповідача .
Вторинна обробка РЛІ полягає у відпрацьовуванні інформації про плоти з метою виявлення і супроводу траєкторій повітряних судів. У випадку наявності декількох РЛС з'являється задача об'єднання інформації від них з метою одержання єдиного системного треку. Інформація про трек надається диспетчеру керування повітряним рухом. Об'єднання радіолокаційної інформації від декількох джерел називається третинною обробкою .
Задачі третинної обробки вирішуються двома основними методами:
- мозаїчна обробка
- мультирадарна обробка.
При мозаїчній обробці кожної РЛС виділяється своя зона огляду, що не перетинається з зонами огляду інших РЛС.
 |
Для формування єдиного системного треку використовується інформація тільки від однієї РЛС.
До недоліків даного методу відноситься проблема супроводу траєкторій повітряних судів при перетинанні границь зон огляду, а також не використання переваги перекриття зон виявлення сусідніх РЛС.
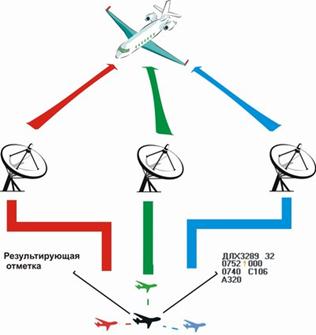
При мультирадарній обробці використовується вся доступна РЛІ для формування єдиного системного треку. Супровід повітряного судна декількома РЛС
У системі обробки РЛІ від декількох РЛС використовується метод мультитрекінгового супроводу повітряної мети. На вхід системи надходить потік плотів від декількох РЛС. Система перетворить вхідні дані в уніфіковані повідомлення. Кожній РЛС присвоюється ідентифікатор, що входить до складу інформації про повітряну мету. Кожна РЛС описується індивідуальними значеннями параметрів.
Для вторинної обробки РЛІ використовуються алгоритми, засновані на дискретному фільтрі Калмана (фільтр першого порядку). Для третинної обробки використовуються алгоритми вагового підсумовування, (фільтр нульового порядку) із приведенням результатів вторинної обробки до єдиного часу. Відносний ваговий коефіцієнт обернено пропорційний квадратному кореню дальності до мети. При цьому також відбувається виділення ведучої РЛС.