Дискретные сигналы определяются для дискретных значений независимой переменной - времени
Последовательности и их представления.
Дискретные сигналы определяются для дискретных значений независимой переменной - времени.
Время квантуется обычно равномерно:
T=nT;
Где Т – интервал между отсчетами
Обозначения последовательностей: 1. {h(n)},Способы получения последовательностей.
1) Взять набор чисел и расположить их в виде последовательности – 0,1,2,3,…,(N-1) Это образует… 2) Использование рекуррентного соотношения:Некоторые важные последовательности.
1) Цифровой единичный импульс (единичный отсчет) Его роль такая же, как аналоговый единичный импульс (дельта функция Дирака) в аналоговых системах.Представление произвольных последовательностей.
Рассмотрим последовательность
а(0), а(1), а(2), … , а(n);
где а(n) – величина n-го элемента.
Такую последовательность можно представить:

Дискретная система.
Алгоритм преобразования
y(n)=Ф[x(n)]
Линейная система.
x1(n) y1(n) x2(n) y2(n)Система с постоянными параметрами (ЛПП).
x(n-n0) y(n-n0) – при любых n0 где n0 – величина задержки.Т.О., чтобы вычислить выходную последовательность системы на заданную входную, необходимо вычислить цифровую свертку входной последовательности и импульсной характеристики системы.
Физическая реализуемость.
ЛПП – система физически реализуема, если отклик при n=n0 зависит только от отсчетов входной последовательности с номерами 
Это означает, что импульсная характеристика h(n) системы равна нулю, при всех 
Примеры систем физически нереализуемых.
- Идеальный ФНЧ
- Идеальный дифференциатор.
Устойчивость ЛПП.
Если при любой ограниченной входной последовательности выходная последовательность так же ограничена.
Необходимое и достаточное условие.
Устойчивость системы: (*)Т.о. последовательность y (0) не ограничена, так, что неравенство (*) является необходимым условием устойчивости.
Доказательство достаточности.
Пусть (*) выполняется. На вход поступает ограниченная последовательность 
Тогда:

Последовательность y(n) ограничена, поэтому система устойчива, что и требовалось доказать.
Примеры импульсных характеристик.
 |
1) Пример устойчивой системы.
 |
2) Пример неустойчивой системы.
 |
Разностные уравнения.
,где коэффициенты {ai} и {bi} полностью описывают конкретную систему, как и…Частотная характеристика систем первого порядка.
Рассмотрим разностное уравнение: С начальным условием: y(-1)=0Частотная характеристика систем второго порядка.
Разностное уравнение: (для простоты члены при коэффициентах b опущены, т.к. они не влияют на характер изложения).Единицы измерения частоты
Запись: x(n), y(n), h(n) - опускается период дискретизации Т или – частота… Тогда запись:Соотношение между непрерывными и дискретными системами.
Спектр: (1) Временная область: (2) Дискретизированный сигнал:Спектральная функция дискретной последовательности состоит из суммы бесконечного числа спектральных компонент непрерывного колебания.
Если спектр непрерывного колебания ограничен по полосе диапазоном частот , где Т – период дискретизации, т.е. при , то в диапазоне :С какой частотой дискретизировать непрерывное колебание?
При <1 соответствующая система является устойчивой.
Z-преобразования некоторых последовательностей
Т.к. при всех n, кроме n=0, где x(n)=1, , то: X(z)=1Геометрическая интерпретация преобразования Фурье
Преобразование Фурье:Структурная схема цифровых фильтров.

Уравнение цифровой свертки:

Z-преобразование:

где Y(z) – z-преобразование выходной последовательности,
X(z) - z-преобразование входной последовательности,
H(z) - z-преобразование импульсной характеристики фильтра.
Тогда:

Выразим H(z) в виде дробно-рационального полинома от переменной z-1, т.е.:
причем b0 д.б. равно 1.
Приведем к общему знаменателю:

Или:
Взяв обратное z-преобразование от левой и правой части (обратное преобразование – не вводилось понятие) можно перейти к последовательностям.

т.к. b0=1, тогда:
 - уравнение цифрового фильтра.
- уравнение цифрового фильтра.
Простая форма 1 его реализации:

Запишем:
Обозначив первый и второй множители за H1(z) и H2(z) соответственно, можно получить два фильтра:

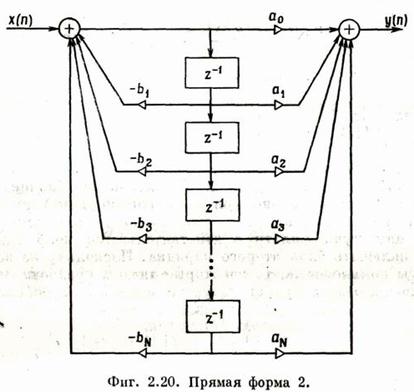
*Прямая форма 2 (неканоническая)
Очевидно, что можно использовать один набор элементов задержки, т.к. задерживается один и тот же сигнал:
*Прямая форма 2 или каноническая форма
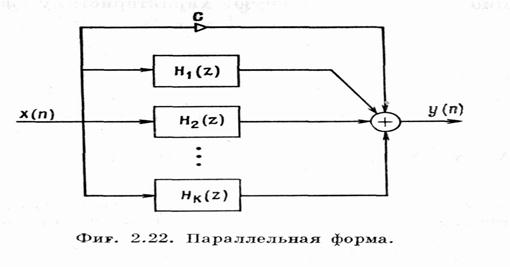
Можно записать:
Получим третью структуру построения цифрового фильтра. Множители Hi(z) соответствуют либо блокам второго порядка:
либо блокам первого порядка, т.е.:

Последовательная (каскадная) форма.
Разложим на простые дроби:
где Hi(z) – соответствуют или блокам второго порядка:

или блокам первого порядка:
Структурные схемы фильтров без полюсов
В частном случае знаменатель дроби: может быть постоянным. Для простоты приравняем его к единице. При этом разностное уравнение становится нерекурсивным,…Дискретное преобразование Фурье
- дискретная свертка - преобразование Фурье - z-преобразование.Свойства ДПФ
xp(n) и yp(n) – периодичные последовательности с периодом N каждая. Xp(к) и Yp(к) – их ДПФ. Тогда для последовательности: xp(n)+yp(n) ДПФ будет равно:Нерекурсивные цифровые фильтры.
Порядок расчета фильтров. Свойства КИХ-фильтров. Характеристики КИХ-фильтров с ЛФХ. Частотные характеристики КИХ-фильтров с ЛФХ.
Порядок расчета цифрового фильтра
2. Выбор конкретной схемы построения фильтра и квантование значений его…Свойства КИХ-фильтров.
Основные достоинства этих фильтров: 1) Легко создавать КИХ-фильтры со строго линейной фазовой характеристикой.… 2) КИХ-фильтры можно эффективно строить как по рекурсивной, так и по нерекурсивной схемам.Характеристики КИХ-фильтров с ЛФХ.
Пусть - физически реализуемая последовательность конечной длины, заданная на интервале . Это конечная импульсная характеристика (КИХ). Преобразование Фурье от {h(n)} – частотная характеристика фильтра:Прямоугольное окно
Весовая функция при при других n.Метод взве шивания
(*) , где Коэффициенты ряда Фурье, т.е. h(n) – совпадает с коэффициентами импульсной характеристики ЦФ.Обобщенное окно Хэмминга
при при других n.Окно Кайзера
Для решения этих задач в непрерывном времени был введен класс так называемых вытянутых сфероидальных волновых функций. Эти функции имеют сложный вид. Кайзер – для их аппроксимации ввел окно, которое называется окном Кайзер:ФНЧ с различными окнами
Рассмотрим идеальный фильтр нижних частот. Будем использовать 3 окна: - прямоугольное - ХэммингаМетод частотной выборки
КИХ-фильтр может быть однозначно задан как коэффициентами импульсной характеристики {h(n)}, так и коэффициентами ДПФ от импульсной характеристики… Они связаны соотношениями: (*) - ДПФСвойства БИХ-фильтров.
, при Форма записи Z-преобразования импульсной характеристики БИХ-фильтров имеет вид:Квадрат амплитудной характеристики
При расчете БИХ фильтров с использованием аппроксимации только АЧХ (без учета фазовой характеристики_ удобнее всего оперировать с квадратом амплитудной характеристики:
Фазовая характеристика
Методы расчета коэффициентов БИХ-фильтров
Необходимо решить задачу расчета коэффициентов фильтра ( и ), которые обеспечивали бы аппроксимацию заданных характеристик фильтра таких, как… 1-я группа методов – проектирование соответствующего фильтра непрерывного… 2-я группа методов – прямые методы расчета цифровых БИХ-фильтров. Необходимо найти такое расположение полюсов и нулей…Расчет БИХ-фильтров по аналоговому прототипу
(*) причем коэффициенты – известны, S – оператор Лапласа.Метод инвариантного преобразования импульсной характеристики.
Этот метод также называется методом стандартного преобразования.
В качестве импульсной характеристики рассчитываемого цифрового фильтра используется дискретизированная импульсная характеристика соответствующего аналогового фильтра.
Передаточная характеристика аналогового фильтра:
 (*) Разложим на простые дроби,
(*) Разложим на простые дроби,
где

Предположение, что M<N (* - разложение на простые дроби) – является в данном случае обязательным, в противном случае наложения в частотной области станут недопустимыми.

Импульсная характеристика h(t) аналогового фильтра:
Дискретизируя ее получим.
 ,
,
где Т – период дискритизации.
Найдем Z – преобразование.

Изменим порядок суммирования.
 (**)
(**)
Сравним (*) (**), переход от H(s) к H(z) осуществляется с помощью отображения, при котором используется замена:
 |

Частотная характеристика цифрового фильтра, рассчитанная методом инвариантного преобразования импульсной характеристики, образуется путем положения частотной характеристики дискретизуемого аналогового фильтра.
Т.о.
 ,
,
где

- угловая частота дискретизации цифрового фильтра
 Каждая горизонтальная полоса, шириной из S – плоскости отображается на Z – плоскость.
Каждая горизонтальная полоса, шириной из S – плоскости отображается на Z – плоскость.
Все смежные полосы из S – плоскости будут при отображении накладываться друг на друга в Z – плоскости.
Отсюда следует, что для того что бы частотные характеристики исходного аналогового фильтра и рассчитываемого методом инвариантного преобразования импульсной характеристики цифрового фильтра соответствовали друг другу, необходимо что бы полоса пропускания аналогового фильтра находилась в пределах диапазона.

Для выполнения этого условия необходимо до начала преобразования (т.е. до АЦП) вводить дополнительный фильтр нижних частот, гарантирующий соответствующее ограничение полосы пропускания аналогового фильтра.
Билинейное Z – преобразование.
Вся ось jw перейдет в единичную окружность, левая полуплоскость окажется… Учитывая, что:Согласованное Z – преобразование.
Непосредственное отображение полюсов и нулей из S – плоскости в полюсы и нули на Z – плоскости. Полюс (или нуль) в точке s = - a плоскости s отображается в полюс (или нуль) в… Т.о. имеет место замена:Обзор методов расчета аналоговых фильтров нижних частот.
Стандартные типы аналоговых фильтров: - Баттерворта - Чебышева 1 типаФильтры Баттерворта.
Апроксимация по Баттерворту – фильтры НЧ имеют максимально гладкую амплитудную характеристику в начале координат в S – плоскости. Для частоты среза:Фильтры второго типа.
где Ωr - наименьшая частота, на которой достигается заданный уровень ослабления.Эллиптические фильтры.
Характеризуются тем, что их амплитудная характеристика имеет равновеликие пульсации в полосе пропускания и в полосе не пропускания. Можно показать, что с точки зрения минимальной ширины переходной полосы…Частотные преобразования.
Рассмотрим методы расчета ФНЧ непрерывных во времени, а так же методы их дискретизации. При расчете цифровых фильтров ВЧ, ПФ и режекторных,… 1.Преобразование полосы частот аналоговых фильтров.
ФНЧ ФНЧПреобразование полосы для ЦФ.
ФНЧ с частотой среза в другой ФН с частотой среза а так же В ФВЧ, ППФ и ПЗФПрямые методы рассчета цифровых фильтров.
Существуют так же прямые методы расчета цифровых фильтров в частотной или временной областях, без аналоговых прототипов.