Алгоритмическое обеспечение комплекса технических средств управления и контроля
Контроль состояния объектов ТС. Информация о состояниях контролируемых объектов формируется путем опроса плат УМВ. Конструктивно входы ТС на плате сгруппированы по восемь, из которых один является диагностическим, а общее число групп равно восьми. Таким образом, каждая плата УМВ обеспечивает подключение до 56 сигналов ТС. Для определения состояния группы объектов необходимо выдать на плату соответствующую маску, затем считать байт состояния восьми входов. Эта процедура выполняется по прерыванию от таймера с периодом 0,2 мс последовательно по всем восьми группам. Опрос всех объектов на плате осуществляется в течение 1,6 мс. Сигналы о состоянии контролируемых объектов физически представлены потенциалом. Объект считается активным, если на входе платы УМВ есть постоянное напряжение, и пассивным—в противном случае. Определяется логическое состояние объекта в течение 0,2 с методом накопления. Байты состояния объектов, считанные с периодом 0,2 мс, заносятся в буфер накопления по условию конъюнкции.
Обработка команд ТУ. При приеме команд ТУкоды дешифруются, анализируются на корректность формата данных и записываются в буферы команд ТУ, один из которых организован по принципу «первый пришел — первый вышел», а второй предназначен для одиночной ответственной команды ТУ. В основном цикле ПО осуществляется идентификация команд ТУ, выбор объектов управления и формируются управляющие воздействия (УВ) согласно типам команд. Различают следующие типы команд ТУ:
• простые команды воздействия на одиночный объект;
• команды установки и отмены маршрутов;
• команды перевода стрелок;
• множественные команды, т.е. при поступлении одной команды ТУ осуществляется одновременное формирование управляющих воздействий на несколько объектов;
• команда на переключение комплектов (обрабатывается только пассивным комплектом);
• виртуальные команды, не управляющие реле, а воздействующие только на состояние переменной (виртуального объекта) в ТЗК ТС.
При управлении стрелкой осуществляется контроль ее текущего положения: если поступила команда перевести стрелку в плюсовое положение и стрелка имеет плюсовой контроль, то УВ на схему стрелки не будет сформировано. УВ применяется только для перевода стрелки в крайнее положение, при противоположном значении имеющегося контроля, а также при его отсутствии для реверсирования стрелки.
Каждая стрелка может быть логически заблокирована для управления. В этом случае команды индивидуального или маршрутного управления не будут выполняться до снятия блокировки. Блокировка стрелки и ее снятие выполняются простыми командами ТУ без подачи УВ в управляющую цепь стрелки.
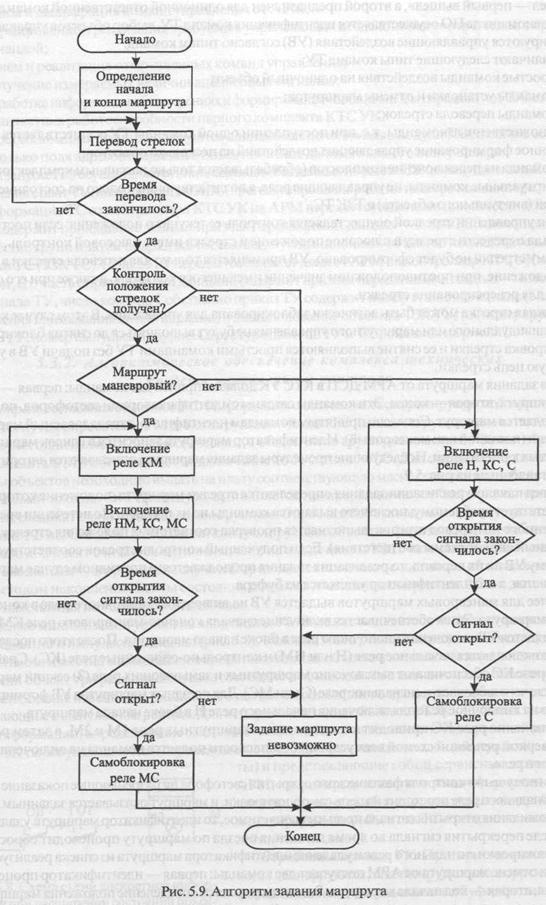
Для задания маршрута от АРМ ДСП в КТС УК должны прийти две команды: первая — начало маршрута, вторая—конец. Эти команды связаны с идентификаторами светофоров, по которым задается маршрут. Согласно принятым командам идентифицируется задаваемый маршрут и его тип (поездной или маневровый). Идентификатор маршрута заносится в список маршрутов принятых к реализации. Последующие процедуры задания маршрута описываются алгоритмом, представленным на рис. 5.9.
РЕЛЕЙНО-ПРОЦЕССОРНАЯ ЭЛЕКТРИЧЕСКАЯ ЦЕНТРАЛИЗАЦИЯ «ДИАЛОГ-Ц»