Расчет такелажной оснастки при подъеме аппарата двумя вертикальными мачтами методом скольжения
В тех случаях, когда габариты и масса оборудования сравнительно невелики, для их монтажа применяют самоходные стреловые краны.
Если для монтажа тяжелых и высоких аппаратов невозможно применить краны из-за недостаточных грузовысотных характеристик или стесненных условий монтажной площадки, используют мачтовые подъемники (мачты, порталы, шевры).
В элементах конструкции подъемных приспособлений и в их такелажной оснастке возникают весьма значительные нагрузки.
От умения правильно составить соответствующую расчетную схему и определить действующие нагрузки зависят правильность подбора необходимого оборудования, безопасность и надежность проводимых методов монтажа.
В приведенных ниже примерах рассмотрены наиболее распространенные схемы подъема колонного оборудования и правила расчета возникающих нагрузок.
Монтаж мачтами производится с применением следующих основных методов: метода скольжения с отрывом от земли с оттяжкой низа аппарата или без оттяжки; методом скольжения без отрыва от земли с подтаскиванием низа аппарата при заводке на фундамент; методом поворота вокруг шарнира. Различие методов обусловлено разным характером передвижения аппарата в процессе подъема из горизонтального положения в вертикальное.
П р и м е р 1.1. Рассчитать такелажную оснастку для подъема колонного аппарата методом скольжения с отрывом низа аппарата от земли двумя вертикальными мачтами.
Исходные данные. Вес колонны Р = 0,8 МН; вес мачты Рм = 0,05 МН; вес грузовых полиспастов Ргп=4 кН; усилие предварительного натяжения ванты S1 — 10 кН; число вант На одной мачте n= 4; длина мачты  =50 м; высота колонны Н= 42 м; расстояние центра массы колонны от основания цм =18 м; диаметр колонны D=2 м; расстояние от оси мачты до якоря задней ванты а = 50 м; расстояние между осями мачт b = 4 м; расстояние от оси мачты до якоря боковой ванты g = 50 м; расстояние по горизонтали от оси мачты до центра массы аппарата в момент отрыва d=20 м; длина тормозной оттяжки
=50 м; высота колонны Н= 42 м; расстояние центра массы колонны от основания цм =18 м; диаметр колонны D=2 м; расстояние от оси мачты до якоря задней ванты а = 50 м; расстояние между осями мачт b = 4 м; расстояние от оси мачты до якоря боковой ванты g = 50 м; расстояние по горизонтали от оси мачты до центра массы аппарата в момент отрыва d=20 м; длина тормозной оттяжки  =40 м; расстояние по вертикали от уровня земли до центра массы аппарата в момент отрыва h = 15 м; кратность полиспаста m = 8; коэффициент динамичности ка =1,1. Расчетная схема приведена на рис. 1.1.
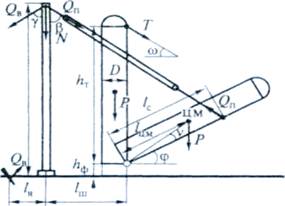
=40 м; расстояние по вертикали от уровня земли до центра массы аппарата в момент отрыва h = 15 м; кратность полиспаста m = 8; коэффициент динамичности ка =1,1. Расчетная схема приведена на рис. 1.1.

Р и с. 1.1. Расчетная схема определения усилий в двух мачтах при подъеме груза с оттяжкой
Предварительно определим:
♦ длину задней ванты
 =70,711 м;
=70,711 м;
♦ расстояние по вертикали от оголовка мачты до точки пересечения осей грузовых полиспастов, оттяжки и центра массы груза
♦ длину боковой ванты

Далее последовательно вычисляем:
♦ расчетное усилие для полиспастов и вант

♦ вертикальную составляющую, обусловленную усилием предварительного натяжения,

♦ суммарную составляющую усилий в грузовых полиспастах

♦ усилия в грузовых полиспастах при симметричном подвесе груза относительно осей мачты

♦ горизонтальную Q3 и вертикальную Q4 составляющие, обусловленные усилиями в полиспасте Т и Т1 действующих в плоскости полиспаста:
♦ усилие в задней ванте

♦ усилие в боковой ванте

¨ вертикальные составляющие  и
и  соответственно усилий
соответственно усилий  и
и  , действующие по оси мачты:
, действующие по оси мачты:


♦ суммарное усилие от веса груза, действующее на оголовок мачты

♦ усилие в тормозной оттяжке

♦ суммарное усилие в середине мачты

Усилие в сбегающей нитке грузового полиспаста, идущей на лебедку, определяется как

Где h— КПД одного ролика в блоке (h= 0,96 при установке ростков на подшипниках скольжения; h= 0,98 при установке ролика на подшипниках качения).
Суммарное усилие на основание мачты составит

1.2. Расчет такелажной оснастки при подъеме аппарата мачтами методом поворота вокруг шарнира
Применение этого метода подъема рекомендуется в том случае, когда высота мачт превышает высоту поднимаемого оборудования. Возможны два варианта взаимного расположения мачт и поднимаемого оборудования.
Первый вариант. Мачты устанавливаются за поворотным шарниром (рис. 1.2, а). При этом оборудование поднимается до нейтрального положения в один этап и далее с помощью тормозной оттяжки плавно опускается на фундамент в проектное вертикальное положение под действием собственной силы тяжести.
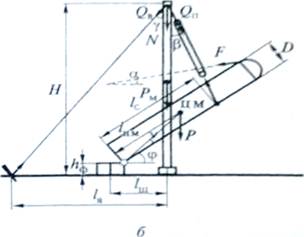
Второй вариант. Мачты устанавливаются между поворотным шарниром и центром массы поднимаемого аппарата (рис. 1.2, б). В этом случае оборудование поднимается в два лапа вначале с помощью мачт на максимально возможный угол, а затем дотягивающей системой до положения неустойчивого равновесия и, наконец, опускается в проектное положение тормозной оттяжкой. В этом варианте нагрузки на мачты, полиспасты и рабочие ванты меньше, чем в первом варианте.
а б
Рис. 1.2. Расчетная схема подъема аппарата методом поворота вокруг шарнира:
а — мачта установлена за поворотным шарниром; 6 — мачта установлена между поворотным шарниром и центром масс (цм) аппарата
Пример 1.2. Рассчитать такелажную оснастку для подъема колонного аппарата методом поворота вокруг шарнира двумя вертикальными мачтами.
Исходные данные. Вес колонны Р= 0,4 МН; диаметр колонны D = 1,2 м; расстояние центра массы колонны от ее основания  = 15 м; высота мачты Н=25 м; расстояние от оси шарнира до оси мачты
= 15 м; высота мачты Н=25 м; расстояние от оси шарнира до оси мачты  = 8 м; расстояние от места строповки аппарата до его основания
= 8 м; расстояние от места строповки аппарата до его основания  = 22 м; расстояние от мачты до якоря ванты
= 22 м; расстояние от мачты до якоря ванты  = 25 м; высота фундамента
= 25 м; высота фундамента  =1,0 м; длина аппарата Lап = 45 м; вес мачты Pм= 15 кН; расстояние от оси шарнира до точки крепления тормозной оттяжки
=1,0 м; длина аппарата Lап = 45 м; вес мачты Pм= 15 кН; расстояние от оси шарнира до точки крепления тормозной оттяжки  = 25 м; угол между тормозной оттяжкой и горизонталью
= 25 м; угол между тормозной оттяжкой и горизонталью  =45°; усилие предвари¬тельного натяжения вант δ = 10 кН; КПД одногр ролика в блоке h= 0,975; кратность полиспаста m = 5.
=45°; усилие предвари¬тельного натяжения вант δ = 10 кН; КПД одногр ролика в блоке h= 0,975; кратность полиспаста m = 5.
Предварительно определим:
♦ расстояние между шарниром и центром массы аппарата

♦ угол между образующей аппарата и линией, соединяющей шарнир с его центром масс,

♦ угол между мачтой и грузовым полиспастом: установка мачты по первому варианту

установка мачты по второму варианту

Угол между мачтой и вантой определяется графически по расчетной схеме или по формуле

Расчетные усилия в грузовом полиспасте находятся в начальный момент подъема при j=0°:
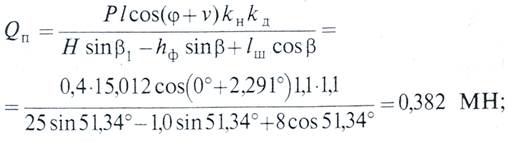
♦ при установке мачт по первому варианту
При одиночной мачте

При парных мачтах
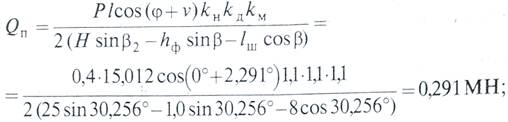
♦ при установке мачт по второму варианту
При одиночной мачте
При парных мачтах

где = 1,1- коэффициент перегрузки, учитывающий возможное отклонение фактической нагрузки от нормативного значения вследствие неточного определения центра массы аппарата и из¬менчивости нагрузки;
= 1,1- коэффициент перегрузки, учитывающий возможное отклонение фактической нагрузки от нормативного значения вследствие неточного определения центра массы аппарата и из¬менчивости нагрузки;  = 1,1 - коэффициент динамичности, учитывающий повышение нагрузки на такелажную оснастку вследствие изменений скорости подъема или опускания груза;
= 1,1 - коэффициент динамичности, учитывающий повышение нагрузки на такелажную оснастку вследствие изменений скорости подъема или опускания груза;  — коэффициент неравномерности нагрузки на такелажные эле¬менты с использованием спаренных мачт (, = 1,1 при использо¬вании балансирных устройств; = 1,2 в отсутствие балансирных устройств).
— коэффициент неравномерности нагрузки на такелажные эле¬менты с использованием спаренных мачт (, = 1,1 при использо¬вании балансирных устройств; = 1,2 в отсутствие балансирных устройств).
По усилию  рассчитывают грузовой полиспаст, т.е. подбирают полиспастные блоки, определяют диаметр роликов в блоке и их число, находят усилие в сбегающем конце полиспаста, по которому подбирают лебедку, подсчитывают диаметр и длину каната
рассчитывают грузовой полиспаст, т.е. подбирают полиспастные блоки, определяют диаметр роликов в блоке и их число, находят усилие в сбегающем конце полиспаста, по которому подбирают лебедку, подсчитывают диаметр и длину каната
для оснастки полиспаста, а также подбирают тип и диаметр каната для гибкого стропа.
Усилие в задней ванте независимо от места расположения мачт определяется как

расчет выполнен для двух мачт, установленных по схеме на рис. 1.2, б.
По усилию  подбирают тип и диаметр каната для задней ванты и рассчитывают для нее якорь, т.е. определяют вес якоря или усилия в анкерных болтах и проверяют устойчивость якоря про¬тив горизонтального сдвига и опрокидывания.
подбирают тип и диаметр каната для задней ванты и рассчитывают для нее якорь, т.е. определяют вес якоря или усилия в анкерных болтах и проверяют устойчивость якоря про¬тив горизонтального сдвига и опрокидывания.
По усилию в тормозной оттяжке:

рассчитывают трос для тормозной оттяжки и подбирают лебедку.
По суммарному усилию, действующему по оси мачты,

где  = 10—30 кН — усилие предварительного натяжения вант; п — число вант мачты, кроме рабочей (задней);
= 10—30 кН — усилие предварительного натяжения вант; п — число вант мачты, кроме рабочей (задней);

усилие в сбегающей ветви полиспаста, проверяют прочность и устойчивость мачты на сжатие.
При установке мачт по второму варианту рассчитывают дотягивающую систему для подъема аппарата мачтами на втором этапе от угла подъема до положения неустойчивого равновесия. С этой целью определяют максимальное усилие F, задаваясь углом наклона а дотягивающей системы к горизонту. При F< 147 кН подбирают лебедку или трактор и рассчитывают дотягивающий трос; при F > 147 кН рассчитывают дотягивающий полиспаст и якорь для него.
1.3. Расчет такелажной оснастки при подъеме аппарата порталом (безъякорный метод)
Преимуществами безъякорного метода подъема можно назвать: отсутствие вант и якорей к ним; незначительное превышение габаритов монтажной площадки по сравнению с габаритами поднимаемого аппарата, что весьма важно при монтаже в стесненных условиях; отсутствие необходимости поднимать и устанавливать в рабочее положение мачтовые подъемники с помощью дополнительных кранов или такелажных средств; отсутствие горизонтальных монтажных нагрузок на фундамент. К недостаткам данного метода подъема можно отнести: чувствительность системы к осадке опор портала; необходимость сооружения фундамента под опорные стойки портала при монтаже аппаратов свыше 250 т в связи с большими усилиями, возникающими в опорно-поворотном шарнире.
Расчетная схема безъякорного метода представлена на рис. 8.3.
 Рис. 8.3. Расчетная схема определения усилий в элементах такелажной
оснастки:
а — в начальный момент подъема портала; 6 — в начальный момент подъема
Рис. 8.3. Расчетная схема определения усилий в элементах такелажной
оснастки:
а — в начальный момент подъема портала; 6 — в начальный момент подъема
|
Пример 8.3. Определить усилия в элементах такелажной оснастки в случае подъема колонного аппарата порталом.
Исходные данные. Вес поднимаемого аппарата Р=1 МН; вес портала  =60 кН; расстояние по оси аппарата от eго шарнира до центра массы = 9 м; расстояние по оси портала от его шарнира до центра массы портала
=60 кН; расстояние по оси аппарата от eго шарнира до центра массы = 9 м; расстояние по оси портала от его шарнира до центра массы портала  = 30 м; длина портала = 35 м; расстояние по вертикали между точкой строповки аппарата и шарниром портала в исходном положении h = 2,5 м; высота фундамента под аппарат над шарниром портала
= 30 м; длина портала = 35 м; расстояние по вертикали между точкой строповки аппарата и шарниром портала в исходном положении h = 2,5 м; высота фундамента под аппарат над шарниром портала  = 1 м; расстояние по оси аппарата между центром массы его и монтажными штуцерами
= 1 м; расстояние по оси аппарата между центром массы его и монтажными штуцерами  = 7 м; расстояние между вертикальной осью, проходящей через башмак (шарнир) портала, и, точкой строповки аппарата в исходном положении перед подъемом a = 2 м; расстояние от шарнира аппарата до его центра массы по ширине аппарата r= 1,3 м.
= 7 м; расстояние между вертикальной осью, проходящей через башмак (шарнир) портала, и, точкой строповки аппарата в исходном положении перед подъемом a = 2 м; расстояние от шарнира аппарата до его центра массы по ширине аппарата r= 1,3 м.
Предварительно определим:
♦ расстояние по вертикали от образующей аппарата до точки строповки

♦ расстояние между шарнирами аппарата и портала

♦ угол между образующей'аппарата и линией, соединяющей его шарнир с точкой строповки, в исходном положении

♦ угол между нижней образующей аппарата и линией, соединя¬ющей его шарнир с точкой центра масс, в исходном положении


Далее определяем угол наклона:
♦ портала в начальный момент подъема аппарата в случае а = 0


♦ аппарата к горизонту в момент неустойчивого равновесия системы аппарат-портал

Усилие в грузовых полиспастах в начальный момент подъема портала, когда  = 0°,
= 0°,  = 0° и
= 0° и  = 0:
= 0:

Усилие в грузовых полиспастах для любого положения портала 0° (аппарат находится в горизонтальном положе¬нии, т.е. = 0°) находится из выражения
(аппарат находится в горизонтальном положе¬нии, т.е. = 0°) находится из выражения
 ,
град. ,
град.
| 2,967 | 5,935 | 8,902 | 11,870 | 14,837 | 17,805 | 20,772 | 23,740 | 26,707 | 29,674 | |
| Q, МН | 0,681 | 0,707 | 0,737 | 0,769 | 0,806 | 0,848 | 0,896 | 0,953 | 1,022 | 1,106 | 1,211 |
| L, м | 33,095 | 32,960 | 32,831 | 32,709 | 32,592 | 32,482 | 32,380 | 32,284 | 32,197 | 32,118 | 32,046 |
где  =cos,
=cos,  = sin— проекции длины портала на горизонтальную и вертикальную плоскости.
= sin— проекции длины портала на горизонтальную и вертикальную плоскости.
Результаты расчета Q, выполненного при а = 2 м, приведены в табл. 1.1, где также даны результаты расчета длины полиспаста по мере самоподьема портала
Таблица 1.1. Усилие в грузовых полиспастах и его длина при самоподъеме портала

Угол подъема портала  при некотором угле наклона аппарата (0°
при некотором угле наклона аппарата (0°  90°), когда система аппарат—портал находится в равновесии (так называемый равновесный угол подъёма портала на второй стадии подъема), находится из соотношения
90°), когда система аппарат—портал находится в равновесии (так называемый равновесный угол подъёма портала на второй стадии подъема), находится из соотношения

 — угол, определяющий положение центра масс в наклонном положении аппарата;
— угол, определяющий положение центра масс в наклонном положении аппарата;  — угол, определяющий положение точки строповки в наклонном положении аппарата.
— угол, определяющий положение точки строповки в наклонном положении аппарата.
Приведенное уравнение решается относительно методом последовательных приближений. Результаты решения представлены в табл. 1.2, откуда следует, что в начальный момент подъема при = 0° угол подъема портала составит = 29,674°, что существенно отличается от угла подъема 44,986°, найденного при условии а=0. По мере подъема аппарата одновременно увеличивается и угол подъема портала , достигая своего максимального значения около 57°. При дальнейшем подъеме аппарата портал начина¬ет опускаться. Когда аппарат попадает в зону неустойчивого равновесия  = 83,866°, портал не работает, поэтому должен подключаться механизм тормозной оттяжки.
= 83,866°, портал не работает, поэтому должен подключаться механизм тормозной оттяжки.
| , град.
| |||||||||
| , град.
| 29,674 | 47,867 | 55,686 | 57,186 | 53,005 | 48,932 | 42,875 | 27,850 | |
 град. град.
| 27,561 | 44,894 | 52,571 | 53,725 | 51,684 | 47,597 | 41,249 | 30,122 | -1,148 |
| Q1, МН | 1,211 | 0,665 | 0,534 | 0,462 | 0,397 | 0,328 | 0.253 | 0,171 | |
| L, м | 32,046 | 29,712 | 27,122 | 24,578 | 22,111 | 19,744 | 17,536 | 15,696 |
Таблица 1.2. Результаты расчета системы портал-аппарат при подъеме аппарата
Усилие в грузовых полиспастах при любом угле подъема аппарата составит

где

Результаты решения приведены в табл. 1.2, где также даны результаты расчета длины полиспаста при подъеме аппарата
