рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Приборостроение
- /
- Основные характеристики измерительных преобразователей
Реферат Курсовая Конспект
Основные характеристики измерительных преобразователей
Основные характеристики измерительных преобразователей - раздел Приборостроение, МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЙ ЭЛЕКТРИЧЕСКИХ Внедрение Механизации И Комплексной Автоматизации В Производство Требует Быст...
Внедрение механизации и комплексной автоматизации в производство требует быстрого и точного контроля технологических процессов, что связано с измерением и контролем самых разнообразных параметров физических величин. Особенно большое число различных неэлектрических величин требуется измерять и контролировать в металлургической, химической и текстильной промышленностях. Развитие измерительной техники показало, что среди разнообразных методов измерения неэлектрических величин наибольшими преимуществами обладают электрические методы, которые обеспечивают:
• возможность измерения сигналов очень малой величины —применение электронных усилителей дает возможность измерять такие сигналы, которые не могут быть измерены никакими другими способами;
• возможность передачи измеренной величины на расстояние, а следовательно, и возможность дистанционного управления различными процессами;
• высокую точность и скорость измерений;
• возможность комплектования измерительных и управляемых ими автоматических установок унифицированными электроизмерительными приборами.
Для измерения любой неэлектрической величины X (температуры, давления, расхода жидкости, скорости, перемещения, ускорения, деформации, вибрации и т.д.) ее преобразовывают с помощью первичного измерительного преобразователя, или датчика, в выходную электрическую величину Y. Далее сигнал Y преобразуется цепью измерительных преобразователей прибора, где он претерпевает ряд изменений по уровню и спектру и преобразуется из одного вида энергии в другой. Таким образом, прибор для измерения неэлектрических величин в общем можно представить в виде цепи измерительных преобразователей, последовательно преобразующих измеряемую величину Х в ряд других величин и в конечном счете — в число (код), определяющее значение измеряемой величины в определенных единицах измерения.
Измерительный преобразователь — техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину, или
измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи. Учитывая, что объект измерения, как правило, сложный процесс, характеризующийся множеством различных параметров, будем считать информативным параметром входного сигнала непосредственно измеряемую величину или величину, функционально связанную с измеряемой величиной. Неинформативный параметр не связан функционально с измеряемой величиной, но влияет на метрологические характеристики преобразователя.
Параметры, характеризующие условия, в которых работает преобразователь, и влияющие на его функцию преобразования, называют влияющими величинами. Зависимость изменения метрологических характеристик преобразователя от изменения влияющей величины или неинформативного параметра входного сигнала в пределах рабочих условий эксплуатации называется функцией влияния. Функция влияния может быть нормирована в виде формулы, графика или таблицы.

|
| Рис. 7. |
Функция преобразования.Связь, выражающая зависимость информативного параметра выходного сигнала от постоянного во времени информативного параметра входного сигнала, называется статической характеристикой (функцией) преобразования. Ее можно описать аналитическим выражением или графиком. В аналитическом виде характеристика преобразования представляется зависимостью Y=f(X), которая может быть линейной (рис. 7, а)
цли нелинейной (рис. 7, б, в). Различают номинальную функцию преобразования YH0M =fH0U(X), приписываемую измерительному преобразователю согласно государственным стандартам, техническим условиям и другим нормативным документам, и реальную (рабочую) Yp =fp(X), которую он имеет в действительности. Динамические характеристики преобразователей представляют собой зависимость информативного параметра выходного сигнала от меняющихся во времени параметров входного сигнала. К числу динамических относятся характеристики: импульсная g(t), являющаяся реакцией преобразователя на дельта-функцию; переходная h{t) — реакция на единичный ступенчатый сигнал; передаточная функция, являющаяся отношением операторных изображений выходной величины к входной К(р) = Y(p)/X(p); амплитудно- и фазочастотная. Динамические (инерционные) свойства преобразователей характеризуют такими понятиями, как скорость преобразования и время преобразования. Скорость преобразования (измерения) определяется числом преобразований (измерений) в единицу времени, выполняемых с нормированной погрешностью. Время преобразования (измерения) определяется временем, прошедшим с начала преобразования (измерения) до получения результата с нормированной погрешностью.
Чувствительность.Чувствительностью преобразователя называют отношение изменения выходной величины (информативного параметра) к вызывающему его изменению входной величины (информативного параметра входного сигнала). Чувствительность равна производной от функции преобразования преобразователя S=dY/dX=DY/DX геометрически выражается тангенсом угла наклона касательной в любой точке кривой функции преобразования. Для линейных преобразователей чувствительность постоянна и может быть определена как

а для нелинейных — чувствительность всегда зависит от входного сигнала.
Погрешность.Абсолютные, относительные и приведенные погрешности преобразователя определяются по входу и выходу, поскольку входная и выходная величины могут иметь разную физическую природу, а также часто отсутствует измерительный преобразователь, по которому можно было бы поверить рабочий преобразователь. Смысл определения погрешностей по входу и выходу поясняется на рис. 8, а. Разность значений реальной и номинальной функций преобразования при одном и том же значении Входной величины X определяет абсолютную погрешность преобра-зователя по выходу

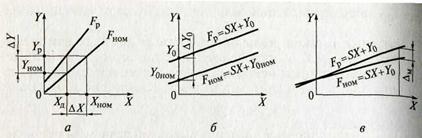
Рис. 8. Погрешности по входу и выходу: а — аддитивная; 6, в — мультипликативные
Погрешность создается самим преобразователем, поэтому представляется целесообразным знать значение входного сигнала, со ответствующего погрешности преобразователя. Абсолютной погрешностью преобразователя по входу называется разность

где Хп — действительное значение входной величины; Хном — значение входной величины, определяемое по номинальной функции преобразования YH0M=fH0M(X), при значении выходной величины Yном, соответствующей действительному значению Хд.

|
| Приведенные погрешности по выходу и входу определяются соответственно |

|
Относительные погрешности по выходу и входу определяются соответственно равенствами
где Хmах, Ymах, Хmin , Ymin — максимальные и минимальные значения входной и выходной величин преобразователя.
Погрешности преобразования зависят как от свойств самого преобразователя, так и от условий, в которых он работает (температуры и влажности окружающей среды, наличия внешних электрических и магнитных полей и т.д.). При нормировании точности измерительных преобразователей обычно указывают область допустимых значений погрешностей преобразования, реализуемого преобразователем при нормальных условиях (основная погрешность), и допустимые изменения функции преобразования при определенных изменениях влияющих величин.
На практике часто используются преобразователи с линейной функцией преобразования, не проходящей через начало координат (рис. 8. б).

где Yo — значение выходной величины при нулевом значении входной.
Отклонение такой реальной функции от номинальной вызвано отклонением Yo и отклонением чувствительности S. Погрешность, обусловленная неноминальным значением выходной величины при нулевом значении входной, называется аддитивной:

где Y0 ном — номинальное значение выходной величины при нулевом значении входной.
Очевидно, что при изменении Yo график функции преобразования перемещается параллельно самому себе, т.е. аддитивная погрешность не зависит от входной величины.

|
| т. е. абсолютная мультипликативная погрешность пропорциональна входной величине X. |
Погрешность, обусловленная неноминальным значением чувствительности S, называется мультипликативной. Погрешность чувствительности, представляющая собой мультипликативную составляющую основной погрешности, приводит к изменению угла наклона реальной характеристики преобразователя относительно номинальной (рис. 8, в). При этом абсолютная мультипликативная погрешность Dм = Y- YH0M зависит от входной величины X. Например, при изменении температурных условий работы преобразователя его чувствительность изменилась на DS и стала равной S= SH0M + DS, где SH0M — номинальное значение чувствительности преобразователя. Абсолютная мультипликативная погрешность чувствительности пропорциональна входной величине Х.
Погрешности системы преобразования.Основная погрешность прибора, состоящего из цепи измерительных преобразователей, складывается главным образом из двух составляющих:
. инструментальной погрешности, обусловленной погрешностями элементов, входящих в каждое звено (например, погрешность подгонки сопротивлений, трение в подвижных частях механизма, недостаточная тщательность исполнения деталей звена);
. погрешности из-за недостаточной чувствительности усилителя и индикаторов.
Каждое из звеньев вносит свою долю в результирующую основную погрешность прибора, причем при прямом преобразовании все звенья равноправны в отношении степени влияния на общую погрешность. Поэтому стремятся всегда к уменьшению числа звеньев цепи преобразования.
Точность измерения неэлектрической величины зависит также и от ряда дополнительных факторов, которые необходимо учитывать. К ним относятся изменения величины напряжения, частоты и формы кривой напряжения питания, изменение окружающей температуры, влажности и вибрации.
Влияние дополнительных погрешностей можно оценить чувствительностью каждого звена к тому или иному влияющему фактору, т. е. отношением изменения выходной величины преобразователя данного звена к изменению дополнительного фактора (относительно его значения при градуировке).
Дополнительные факторы вызывают дополнительную составляющую погрешности нуля и чувствительности прибора. Действительно, изменение питающего напряжения вызывает появление погрешности чувствительности во всех мостовых цепях (кроме равновесных мостов). В усилителях изменение питающего напряжения также вызывает некоторое изменение чувствительности.
При изменении температуры изменяются жесткость упругих элементов, индукция постоянных магнитов, магнитные свойства ферромагнитных материалов. Кроме того, погрешность нуля и чувствительности прибора может быть вызвана изменением во времени параметров отдельных элементов схемы, шумами в элементах схемы, наводками промышленной частоты и т.д.
Для уменьшения дополнительных погрешностей прибегают к стабилизации напряжения и частоты источников питания, к различным приемам коррекции этих погрешностей и особенно заботятся о стабильности во времени физических свойств и параметров элементов прибора.
Кроме того, при анализе погрешностей сложных измерительных устройств, состоящих из целого ряда самостоятельных звеньев, не всегда можно строго разграничить погрешности на систематические и случайные. Например, погрешность измерения от колебаний напряжения питающей сети с первого взгляда представляется систематической, так как на каждые ±10 % питающего напряжения прибор может иметь ±1 % изменения чувствительности. Однако мгновенные изменения питающего напряжения сети происходят хаотически, и погрешность измерения, возникающая из-за этого, хотя и является однозначной функцией этого напряжения, но будучи функцией случайной величины, представляет собой также случайную величину.
Это сильно затрудняет суммирование погрешностей измерительных устройств. Поэтому при анализе и выборе метода и суммирования погрешностей сложных измерительных устройств следует подразделять погрешности не на систематические и случайные, а по признаку их сильной или слабой взаимной корреляционной связи. Если ряд погрешностей одного или нескольких преобразователей вызывается одной общей причиной, в результате чего они оказываются сильно связаны между собой, то эти погрешности будут распределены по одному и тому же закону, а форма результирующего закона распределения будет также соответствовать этому закону. Поэтому внутри каждой из этих групп погрешности должны складываться алгебраически с учетом их знака.
Результирующие погрешности, полученные после суммирования в каждой из групп, уже не имеют между собой сильных корреляционных связей и должны рассматриваться как независимые и, следовательно, должны складываться геометрически.
9. Классификация измерительных преобразователей
Преобразователи обычно классифицируются по их принципу работы или по их практическому применению.
По назначению измерительные преобразователи подразделяют на первичные преобразователи (датчики), унифицированные и промежуточные.
Первичный измерительный преобразователь {датчик) является первым в измерительной цепи и включает в себя чувствительный элемент (зонд, мембрану) и все другие необходимые элементы для преобразования входной неэлектрической величины в выходную электрическую величину. Датчик может состоять из одного или нескольких измерительных преобразователей, объединенных в единую конструкцию. На датчик непосредственно воздействует измеряемая неэлектрическая величина (сила, давление, уровень, температура и т.д.).
В унифицированном преобразователе, состоящем из датчика И схемы согласования, измеряемая физическая величина преобразуется с использованием источника энергии в нормированную выходную величину. Нормированные сигналы постоянного тока находятся в диапазоне от 0 до ±5 мА или от 0 до ±20 мА. Для устройств со смещенным нулем диапазон тока сужен: ±1...±5 мА или ±4...±20 мА. При необходимости регулирования границы диапазона токовых сигналов лежат в пределах: нижняя 0... 5 мА, верхняя 12...25 мА. В устройствах с нормированными токовыми сигналами допускается применение различных измерительных приборов с внутренним сопротивлением не более 1 кОм. Нормированные значения диапазонов сигналов напряжения составляют О...±1 В и 0...±10 В, причем внутреннее сопротивление измерительных приборов не должно быть менее 1 кОм. При использовании в качестве выходной величины частоты рекомендуемый диапазон ее изменения составляет 5... 25 Гц. В пневматических системах нормировано давление газа 0,02…0,1Мпа. Промежуточный преобразователь получает сигнал измерительной информации от предшествующего преобразователя и передает после преобразования этот сигнал последующему преобразователю.
По характеру преобразования входной величины измерительные преобразователи подразделяют на линейные и нелинейные. Линейный преобразователь реализует линейную функциональную зависимость между входной и выходной величинами. У нелинейных преобразователей эта связь нелинейная.
По принципу действия датчики подразделяются на параметрические и генераторные. В параметрических датчиках измеряемая величина вызывает пропорциональное ей изменение параметра электрической цепи (R, L, С), например величины сопротивления реостатного датчика. При использовании параметрических преобразователей необходим дополнительный источник питания, энергия которого используется для преобразования выходного сигнала преобразователя. Выходным сигналом генераторных датчиков является ЭДС, напряжение, ток или электрический заряд, функционально связанные с измеряемой величиной, например ЭДС термопары. К генераторным относятся индукционные, пьезоэлектрические, термоэлектрические и некоторые разновидности электрохимических датчиков. Остальные датчики являются параметрическими.
По принципу действия датчики также подразделяются на типы:
•резистивные, в которых измеряемая величина преобразуется в изменение его сопротивления;
•электромагнитные, в которых измеряемая величина преобразуется в изменение индуктивности или взаимоиндуктивности;
•емкостные, в которых измеряемая величина преобразуется в изменение емкости;
• пьезоэлектрические, в которых динамическое усилие преобразуется в электрический заряд;
• гальваномагнитные, основанные на эффекте Холла и преобразующие величину действующего магнитного поля в ЭДС;
• тепловые, в которых измеряемая температура преобразуется в ЭДС или в величину термосопротивления;
• оптоэлектронные, — в которых оптические сигналы преобразуются в электрические.
Для датчиков основными характеристиками являются: тип, диапазон измеряемой величины, диапазон рабочих температур и погрешность в этом диапазоне, обобщенное входное и выходное сопротивления, частотная характеристика.
Области применения датчиков благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т.д.) и новых материалов непрерывно расширяются. Рассмотрим лишь некоторые из них:
• промышленная техника измерения и регулирования;
• робототехника;
• автомобилестроение;
• бытовая техника;
• медицинская техника.
В промышленной технике стандартные датчики используются для измерения: расхода, количества, давления, температуры, уровня, химического состава.
Большим спросом пользуются датчики новых типов, например:
• датчики положения, перемещения и изображения;
• оптические и волоконно-оптические датчики;
• биодатчики (биотехнология);
• многокоординатные датчики (распознавание образов).
Для современных производств характерна тенденция применения датчиков в интерактивном режиме, т.е. когда результаты измерений сразу же используются для регулирования процесса. Благодаря этому в любой момент обеспечивается корректировка технологического процесса, что естественно ведет к более рациональному производству. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна быть не более 1... 2 %, а для задач контроля — 2... 3 % •
В робототехнике, которая в принципе представляет собою сложную информационную систему, робот обеспечивает получение, обработку и преобразование информации. При получении информации через датчики роботу требуется прежде всего способность «видеть» и «ощупывать», т.е. использование оптических и многокоординатных датчиков.
При изготовлении датчиков для автомобильной электроники все в большей мере применяют современные технологии, обеспечивающие экономичное изготовление датчиков минимальных размеров для отдельных систем автомобиля (рулевое управление, двигатель, тормоза, электроника кузова), для обеспечения безопасности и надежности (система блокировки и противоугонная система, информационная система: расход топлива, температура, маршрут движения и т. д.). С помощью этих датчиков измеряются различные физические параметры, такие как температура, давление, скорость вращения, ускорение, влажность, перемещение или угол, расход и т.д.
В табл.1 приведены области применения некоторых типов датчиков.
Таблица 1.

|
– Конец работы –
Эта тема принадлежит разделу:
МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЙ ЭЛЕКТРИЧЕСКИХ
ВЕЛИЧИН Измерение постоянного тока и напряжения Выбор измерителя обусловлен мощностью объекта... Контрольные вопросы... Приборы каких систем можно использовать для измерения постоянного тока и напряжения...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Основные характеристики измерительных преобразователей
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.023 сек.
Новости и инфо для студентов