Динамические свойства регулятора
По динамическим свойствам регуляторы делятся:
1.П-пропорциональный регулятор, где работают пропорциональные законы регулирования.
2.И - интегральный регулятор, где работают интегральные законы регулирования.
3. ПИ - пропорционально – интегральный регулятор, где работают пропорционально- интегральные законы регулирования.
4.ПИД-пропорционально-интегрально-дифференциальный регулятор, где работают пропорционально – интегрально – дифференциальные законы регулирования.
Пропорциональный регулятор
 У пропорционального регулятора выходной сигнал регулятора прямо – пропорционален входному сигналу: у = к×ξ, где
У пропорционального регулятора выходной сигнал регулятора прямо – пропорционален входному сигналу: у = к×ξ, где
у – выходной сигнал регулятора
ξ – (ипсилон) входной рассогласованный сигнал регулятора.
ξ =ХР.В. - Х З.В.
К – коэффициент, является параметром настройки регулятора и определяет чувствительность регулятора.
Х З.В. – заданная величина регулятора.
К1 и К2 – регуляторы с разной настройкой.
Преимущества данного регулятора
это высокое быстродействие.
Недостатки это неточность регулирования.
Интегральный регулятор
 у = ξ×ctga
у = ξ×ctga
ТИ - время интегрирования
При ТИ = 0 у =0
Параметром настройки регулятора является время ТИ, который меняется
от нуля до бесконечности, чем больше
ТИ, тем меньше чувствительность
регулятора и наоборот.












 Преимущества – точность и плавность
Преимущества – точность и плавность
 регулирования. Недостаток - низкая чувствительность.
регулирования. Недостаток - низкая чувствительность.
 |
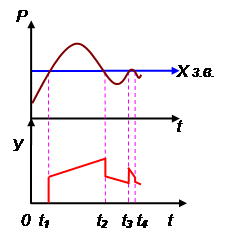
 Пропорционально – интегральный регулятор
Пропорционально – интегральный регулятор
Регулятор устраняет недостатки
 пропорционального, так и
пропорционального, так и
интегрального регулятора.
у=кξ + ξ ctga
 Закон регулирования – это способ воздействия на объект. Меняя ( К) и (ТИ) мы можем получить чувствительность регулятора различной величины.
Закон регулирования – это способ воздействия на объект. Меняя ( К) и (ТИ) мы можем получить чувствительность регулятора различной величины.
При завышении чувствительности
Возникает колебательный процесс, и
это приведёт к остановке НПС.