Оптимальные параметры настройки регулятора
Для регулирования настройки используются ПИ – регулятор. Параметром настройки, которого, является:
К - коэффициент усиления.
 ТИ - время интегрирования.
ТИ - время интегрирования.
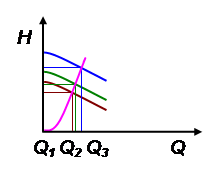
Эти параметры будут оптимальными, если переходный процесс будет иметь колебательно – затухающий вид.
1. А – динамическая ошибка будет меньше зазора безопасности.
2. Tр – время регулирования должно быть минимальным.
d - статическая ошибка или контрольная точка регулятора.
Колебательно – затухающий процесс может перейти в колебательный
процесс из-за изменения объекта (изменение режима нефтепровода).
Все станции по перекачке нефти имеют два режима работы – автоматический, когда процесс поддерживает регулятор и ручной, когда процессом управляет оператор. Лучший процесс регулирования это К =3 и ТИ =0,5
Методы регулирования давления
Назначение САР – это поддержание давления на приёме НПС не ниже заданного, исходя из условий кавитации насоса, и на выходе станции, не выше заданной величины, исходя условий прочности трубопровода.
1. Метод регулирования числа оборотов насосного агрегата, этим методом достигается:
а) глубина регулирования
б) обеспечивает плавный пуск и плавную остановку, что сохраняет трубопровод от действия ударной волны.
2. Метод дросселирования.
Метод дросселирования реализуется
и используется на объектах
“ Транснефть”
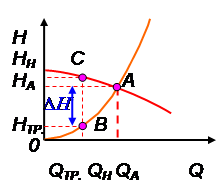
DН = НН - НТР
НН –напор насоса (точка С)
НТР - напор в трубе (точка В)
DН – разность напоров насоса и напора
в трубе (точка А)
 Данный метод контролирует:
Данный метод контролирует:
а) параметр нагнетания насоса и обеспечивает его защиту
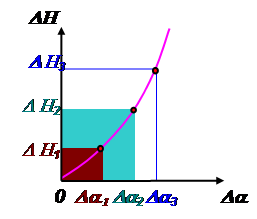
б) зависимость перепада давления от положения заслонки – величина не линейная.
Da1 – зона нечувствительности, т.е.
регулятор предварительно прикрывают, убрав зону нечувствительности (угол a1)
Da2 – зона дросселирования -
(зона, где появляется перепад).
Основными недостатками этого метода являются:
1.Предварительно прикрывают регулятор, убрав зону нечувствительности.
2.Ограничивают крайнее положение заслонки.
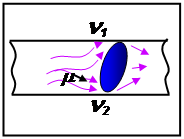 3.n2 > n1 Поток нефти m закрывает заслонку, чем больше перепад, тем больше усилие закрытия.
3.n2 > n1 Поток нефти m закрывает заслонку, чем больше перепад, тем больше усилие закрытия.
а) нельзя оставлять заслонку в потоке нефти в свободном состоянии.
б) привод заслонок должен иметь систему торможения, предотвращающее закрытие заслонки при снятии напряжения.
в) необходимо контролировать перепад давления на регулирующей заслонке, при максимальном перепаде от 17 – 19 атмосфер.
Блок –схема САР давления
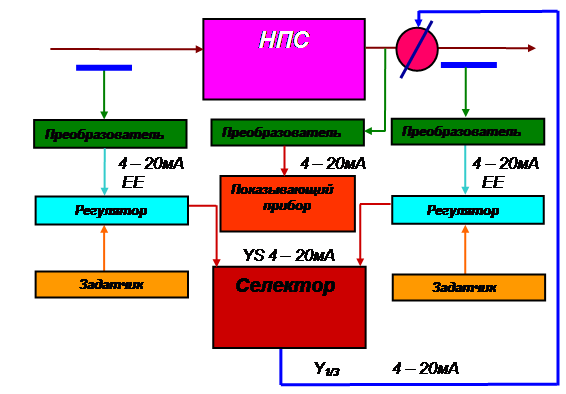
Селектор пропускает больший по величине электрический сигнал (его функция), т.е. уменьшается давление приёма, заслонка отрабатывает по приёму (заслонка прикрывается) увеличивается давление на выходе станции (заслонка прикрывается по выходу).
| Приём станции | Выкид насоса | Выкид станции | Заслонка | ||||
| Атм. | мА | Атм. | мА | Атм. | мА | % | мА |
| Предел измерений | ток | Предел измерений | ток | Предел измерений | ток | Предел измерений | ток |
| 0 | 4 | 0 | 4 | 0 | 4 | открытие - 0 | 4 |
| 10 | 8 | 25 | 8 | 17,5 | 8 | 25 | 8 |
| 20 | 12 | 50 | 12 | 35 | 12 | 50 | 12 |
| 30 | 16 | 75 | 16 | 52,5 | 16 | 75 | 16 |
| 40 | 20 | 100 | 20 | 70 | 20 | 100 | 20 |
Режимы работы
1.Режим управления с помощью штурвала, для этого необходимо отключить силовой блок питания или перевести заслонку в кнопочный режим.
2.Кнопочный режим с регулятора ЕЕ на НS1
3.Ручной режим т.е. сигнал у1/3 задаётся оператором, для этого селектор уS ставим в ручной режим переключателем НS2. В некоторых системах ручной режим задаётся с регуляторов, это позволяет одновремённое плавное управление 2мязаслонками.
4.Основной режим работы – автоматический он имеет следующие режимы: МДП или РДП, где МДП – местный диспетчерский пункт, РДП – районный диспетчерский пункт.
Переходы с режима на режим не требуют подготовительных работ (с автоматического режима на кнопочный или ручной), а обратный процесс требует подготовительных работ (с режима кнопочного на автоматический). Основная задача при переводе заключается в том, чтобы исполнительный механизм не изменил своего положения:
1.Определяем положение заслонки.
2.Определяем величину сигнала управления, по прибору Е1 если сигналы не равны, то определяем:
а). Определяем, какой регулятор, выдаёт сигнал.
б). Сравниваем сравнимую величину с переменной (регулируемой).
в). Контролируем изменение величины выходного сигнала.
г). При равенстве сигналов положение заслонки и сигналов управления, включаем её в автоматический режим.