Проблема обоснования надежности полученных результатов оптимизации параметров ГТД
Величина критериев оценки ЛА естественно зависит от исходных проектных данных СУ. Значительная часть их определяется на основе прогнозных оценок. Поэтому существенная часть исходных данных бывает известна со значительной неопределенностью.
Учитывая, что выше мы говорили о многокритериальности, т.е. неопределенности цели, теперь можно говорить о неопределенности исходных данных.
Благодаря этому задача оптимизации параметров ГТД приобретает многовекторный характер, т. к. при неопределенности исходных данных каждый из критериев входящих в комплексную оценку эффективности ЛА, в свою очередь является вектором.
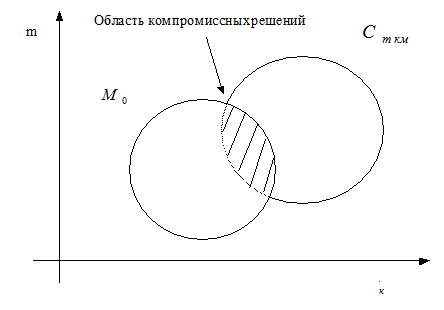 |
Решение многовекторной задачи оптимизации и выбора значений параметров ГТД обычно начинают с определения области компромиссов. На примере 2-х параметрической и 2-х критериальной задачи имеем (см. рис.).
Рис. - Пример области компромисса
Область компромисса - это результат пересечения подмножеств параметров, оптимальных по разным критериям.
 |
Затем определяют специальными методами такие сочетания исходных данных неопределенной величины, которые смещают базовые области в противоположные стороны.
Гарантируемая область компромиссов - это пересечение подмножеств для комплекса из r-критериев с учетом неопределенности (q) части исходной информации.
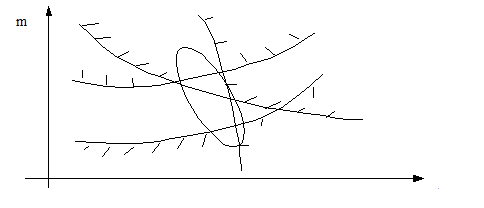 |
После нахождения области компромисса на нее накладываются различные проектные ограничения.
Наилучшее сочетание внутри оставшейся области компромиссов определяются с помощью различных принципов оптимальности:
1) минимаксный (принцип Сэвиджа);
2) минимизация средних (принцип Лапласа);
3) минимизация среднего арифметического максимального и минимального значения (принцип Гурвица).
Выбранные таким образом значения рабочего ГТД являются основой "Технического предложения" (ТП) по ГТД, что в свою очередь является ТЗ для последующего проектирования узлов двигателя.